R-learning based education, though still in its infancy, holds much promise and the more educators know about what makes it succeed and when it does, the more empowered teachers will become in using it. The purpose of this study is to determine whether or not the type or quality of the physical environment of R-learning based education influences teachers’ robot application ability and application level. To this end, questionnaires were distributed to kindergarten teachers and the collected data were analyzed using t-test, one-way Analysis of ANOVA, correlation analysis, and multi-regression. The results of the study reveal 1) that an accessible placement of the robot equipment ranked high as being important for teaching and administration while teaching materials and aides ranked low with respect to the physical environment of R-learning based integrative activities. 2) There is a positive and statistically significant correlation between the physical environment of R-learning based education and robot application ability and level. 2) The levels of teachers’ robot application are influenced by the number of computers connected to the robot for R-learning purposes and the practical aspects of the physical environment. These findings regarding the kind of physical environment best suited for R-Learning should be helpful in considering setting up R-learning programs and promoting teacher efficacy and confidence in R-learning.
2010년 이후 로봇이 유아교육현장에 보급되면서 로봇에 관한 인식 연구를 비롯하여 로봇적용효과에 관한 연구들이 다양하게 시행되었으며 이에 대한 긍정적 효과들이 검증되고 있다(김경철, 박성덕, 정재엽, 2010; 변윤희, 2011; 이정욱 외, 2011). 이들 선행 연구에 의하면 로봇은 유아의 학습에 동기를 부여하고, 흥미를 지속하는 수용적인 매개체로 인식되며 이러한 로봇을 통합 학습은 유아들이 주도적이며 협력적으로 학습과정에 참여하게 하는 효과를 나타냈다. 즉, 유아교육현장에 보급된 로봇에 대한 수용성과 로봇을 통한 교육은 유아의 학습과 교사의 교수실제에서 긍정적인 측면들로 나타났으며 현재의 시점에서 로봇을 통한 학습(R-러닝: 로봇기반교육)의 적정구현을 위한 다각적 노력에 대한 관심이 대두되고 있는 실정이다.
로봇기반교육이 유아교육현장에서 적정하게 구현되기 위해서는 교사, 유아, 물리적 측면 등의 수용성 요인을 분석하여 R-러닝의 보급과 확산을 위한 최적화된 기반 구축이 이루어져야 한다. 특히 R-러닝은 로봇을 통한 교육을 시행하기 위해 최소한의 물리적 기반이 선행되어야 로봇을 통한 학습이 이루어질 수 있다. 로봇기반교육을 위한 물리적 환경은 로봇가동을 위한 하드웨어 환경(예: 서버, 네트워크 등), 로봇관련 기자재 환경(예: 컴퓨터 보유 수 등), 외부지원 환경 등으로 이들 물리적 환경의 수준은 교수·학습과정에 직접적인 영향을 미치게 된다.
R-러닝 활용에 관한 연구에 의하면 교사들은 로봇 사용에 대한 지식 및 기술의 부족, 전문성 부족, 연결 시스템의 불안정 등으로 인해 로봇 적정 구현에 대한 불안감을 나타내는 것으로 나타났다. 또한, R-러닝에 관한 교사 연수에 관한 연구에서도 로봇 가동을 위한 전문적 지원에 대한 요구가 절실한 것으로 나타났다. 즉, 로봇기반교육에 대한 학습 효과나 교사 인식의 긍정성이 확인되고 있으나 여전히 로봇이라는 첨단 매체의 사용과 로봇에 관한 물리적 환경에 대한 환경적 불안정성은 교사로 하여금 R-러닝 교육을 시행하는데 있어 심리적 혹은 교수실제에 있어 부정적인 영향을 미칠 수 있다.
로봇기반교육은 유아교육현장에서 통합 활동의 형태로 다양하게 적용되고 있으며 로봇의 수용적 양상과 향후 확산 및 보급을 위한 미시적 접근 및 분석이 다각적으로 시행되고 있다(김상윤 외, 2012; 심숙영, 오정윤, 2011; 윤현민, 2011). 그러나 향후 R-러닝의 보급 및 확산을 위해 R-러닝 적정 구현에 필수적인 R-러닝의 물리적 환경을 파악하고 이에 따른 교사의 로봇활용 능력과 수업에 로봇을 활용하는 정도를 이해하는 연구가 요구된다고 하겠다.
기존의 선행연구에 의하면 로봇에 대한 긍정적 인식은 교사의 로봇 활용에 긍정적인 역할을 한 반면에, 로봇에 대한 막연한 불안감은 교사의 로봇 활용에 부정적인 영향을 미치는 것으로 나타났다(이정욱 외, 2011a; 2011b). 또한 교사가 로봇에 대한 지식이나 기술이 부족한 경우 로봇을 통한 교육에 대한 막연한 불안감이나 활용 의지가 낮은 것으로 나타났다. 따라서 R-러닝 적정 구현을 도모하려면 교사를 대상으로 한 연수나 컨설팅을 통해 교사의 로봇사용 및 로봇관련 전문 지식과 기술을 지원할 수 있는 방안이 요구된다(이연승 외, 2012). 이러한 차원에서 R-러닝을 위한 물리적 환경의 적정구현은 교사교육 및 훈련 혹은 외부 컨설팅 지원과는 별도로 확보되어야 할 요소이다.
로봇기반교육의 물리적 환경으로서 유치원 및 학급에서의 컴퓨터 보유, 네트워크 현황, 물리적 공간 확보, 로봇과 관련한 교구 및 교재 구비, 외부의 기술적 지원 등과 같은 세부 사항에 대한 조사는 교사의 로봇활용 능력과 수업에 활용 정도를 파악하고 이해하는데 필수적이다. 선행연구에서는 로봇을 통한 교수·학습 환경에서 교사가 로봇과 로봇의 사용에 대한 막연한 불안감을 제시했다면 본 연구에서는 물리적 환경의 세부 내용을 중심으로 교사의 로봇활용 능력과 수업에 로봇활용 정도에 대해 중점적으로 분석하고자 하였다. 로봇기반교육의 물리적 환경은 유아교육기관 및 교사 변인에 따라 질적인 수준에서 차이가 나며 이러한 차이는 교사가 수업에서 로봇을 활용하는 정도와 교사가 로봇의 기능을 이해하고 다루는 활용능력에 영향을 미치게 될 것이다. 따라서 본 연구는 로봇기반교육의 물리적 환경의 현황을 파악하고 이를 근거로 로봇기반교육의 물리적 환경이 수업에 활용되는 정도와 교사의 로봇활용 능력에 미치는 영향을 조사하고자 하였다. 본 연구를 위한 연구문제는 다음과 같다.
본 연구는 로봇기반교육의 물리적 환경이 교사의 로봇활용 능력 및 활용 정도에 미치는 영향을 알아보기 위하여 로봇을 활용하고 있는 유치원 교사 124명을 대상으로 하였다. R-러닝을 실행하고 있는 전국의 유치원을 단순 무선표집하여 전화로 본 연구의 목적과 의의를 설명하고 연구 참여에 대한 동의를 얻었다.
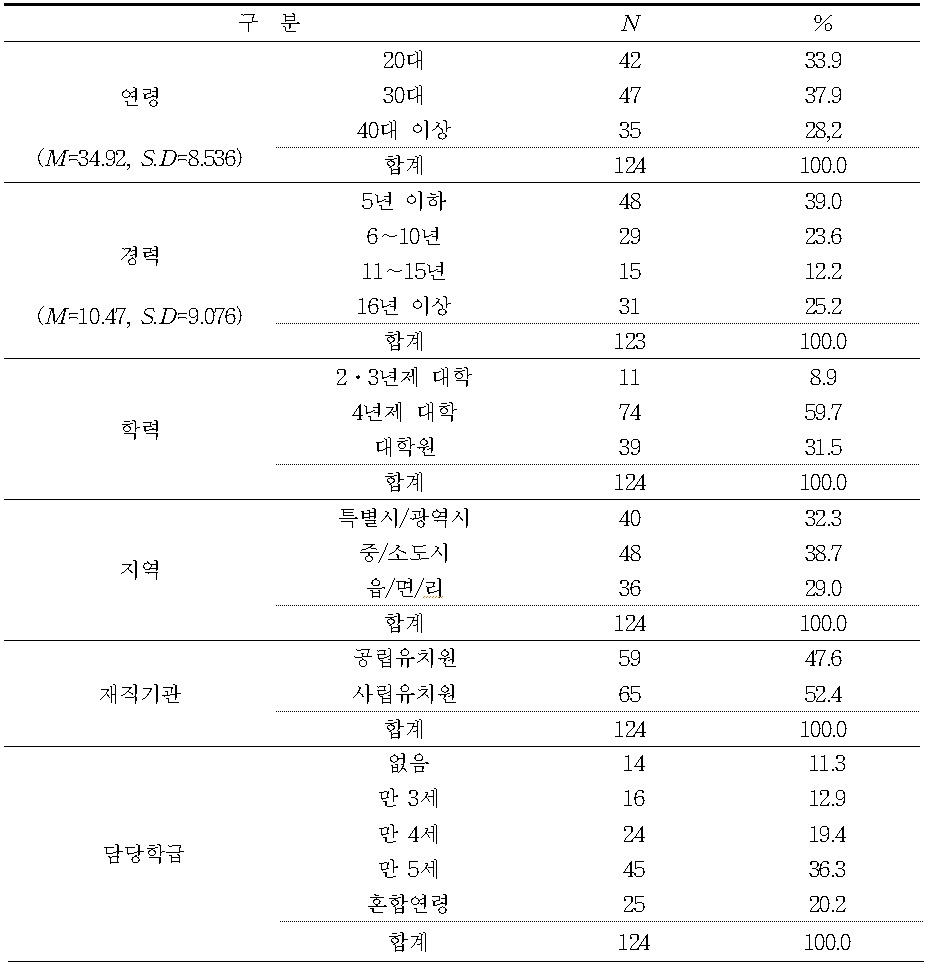
연구대상의 인구사회학적 특성을 구체적으로 살펴보면 <표 1>과 같다. 연령은 30대가 37.9%(47명)로 가장 많았으며 다음으로 20대가 33.9%(42명), 40대 이상이 28.2%(35명)로 나타났다. 평균연령은 34.92세인 것으로 나타났다. 경력에서는 5년 이하가 39.0%(48명)로 가장 많았으며 다음으로 16년 이상이 25.2%(31명), 6∼10년이 23.6%(29명)의 순으로 나타났다. 평균경력은 10.47년인 것으로 나타났다. 학력에서는 4년제 대학교 졸업이 59.7%(74명)로 가장 많았으며 다음으로 대학원 졸업이 31.5%(39명), 2·3년제 대학 졸업이 8.9%(11명)로 나타났다. 지역에서는 중·소도시가 38.7%(48명)로 가장 많았으며 다음으로 특별시·광역시가 32.3%(40명), 읍·면·리가 29.0%(36명)의 순으로 나타났다. 재직기관은 사립유치원이 52.4%(65명), 공립유치원이 47.6%(59명)로 나타났다. 담당학급은 만 5세가 36.3%(45명)로 가장 많았으며 다음으로 혼합연령이 20.2%(25명), 만 4세가 19.4%(24명)의 순으로 나타났다.
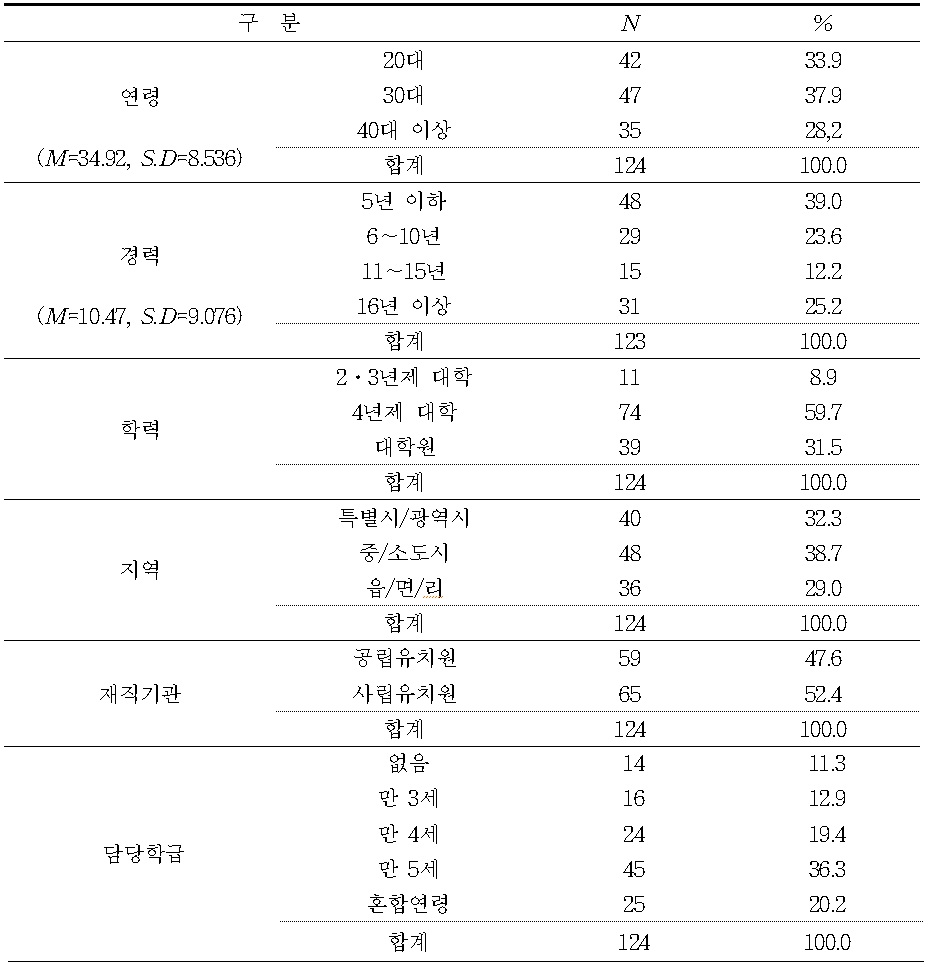
연구대상의 인구사회학적 특성
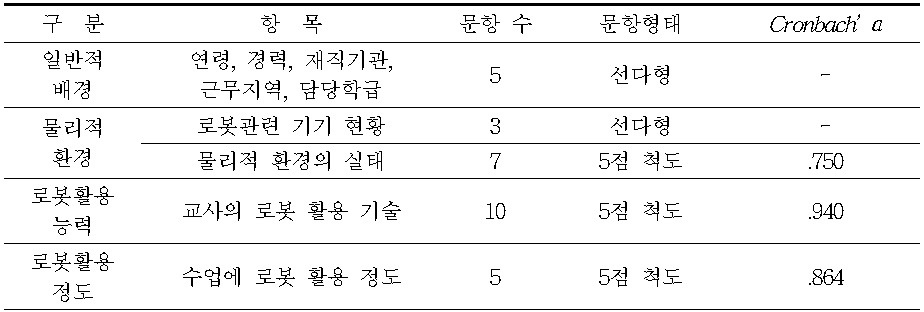
본 연구는 로봇기반교육의 물리적 환경이 교사의 로봇활용 능력 및 활용 정도에 미치는 영향을 알아보기 위하여 설문지를 사용하였다. 물리적 환경과 관련된 문항은 주영주, 박성희, 김나영(2006)이 개발한 ‘유아 ICT 활용 환경 평가 척도’를 본 연구의 목적에 맞게 수정 보완하였다. 로봇활용 능력과 관련된 문항은 강정선(2005) 연구의 ICT 활용 기술 문항 중 로봇과 관련된 문항을 발췌하여 수정 및 보완하였다. 또한 수업에 로봇활용 정도와 관련된 문항은 교원의 ICT 활용 촉진 연구(김미량, 한광현, 2006)연구에서 수업 이용과 관련되는 문항을 추출하여 R-러닝과 관련하여 수정 및 보완하였다. 문항은 5점 리커트 척도(전혀 그렇지 않음=1, 그렇지 않음=2, 보통=3, 그러함=4, 매우 그러함=5)로 구성되었으며, 각 문항의 신뢰도 계수는 <표 2>에 제시되어 있다.
완성된 설문지는 문항이해에 대한 적절성을 검토 받기 위하여 로봇기반교육 관련 연구에 참여한 경험이 있는 유아교육학과 교수 3인에게 영역과 하위내용의 적절성을 검토 받았다. 안면타당도 검정한 후 설문지 활용에 큰 문제가 없는 것으로 판단되어 최종 설문지로 활용하였으며, 설문지의 문항구성 및 문항 수는 다음 <표 2>와 같다.
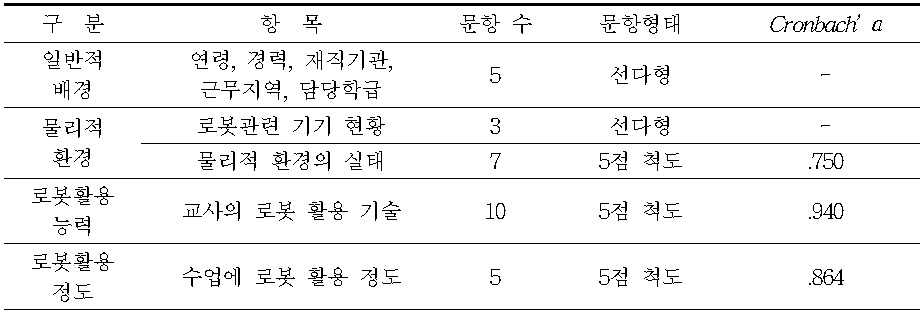
설문지 문항 구성
1) 예비연구
최종적으로 작성된 설문지는 로봇을 활용한 수업 경험이 있는 유치원 교사 11명을 대상으로 예비조사를 실시하였다. 설문지 문항의 이해여부를 조사한 결과 문제점이 발견되지 않아 그대로 사용하였다.
2) 본 연구
2014년 4월 1일부터 5월 2일까지 로봇을 활용하여 수업하고 있는 유치원 교사들에게 설문지 총 320부를 배부하여 150부를 회수하였다. 회수된 설문지 중 이중 응답, 일부 누락 등의 사유로 연구 결과에 활용할 수 없는 자료를 제외하고 124부가 최종 분석되었다.
연구의 수집된 자료는 부호화 과정과 오류검토 작업을 한 후 SPSS WIN 18.0. 프로그램을 사용하여 통계처리를 하였으며, 본 연구에서 사용된 자료 분석 방법은 다음과 같다.
첫째, 응답자의 인구사회학적 특성, 물리적 환경과 교사의 로봇활용 능력 그리고 수업에 로봇활용 정도를 파악하기 위해 빈도분석(frequency analysis)과 기술통계(descriptive analysis) 분석을 실시하였다.
둘째, 배경 변인에 따라 물리적 환경의 차이를 알아보기 위해 독립표본 t-검정(independent two samples t-test)과 일원배치 분산분석(One-way ANOVA)을 실시하였다.
셋째, 로봇기반교육의 물리적 환경이 교사의 로봇활용 능력 및 로봇활용 정도에 미치는 영향을 파악하기 위해 상관관계 분석(pearson correlation Analysis)과 다중 선형회귀분석(multiple linear regression analysis)을 실시하였다.
1) 로봇기반교육과 관련된 기기 보유 현황
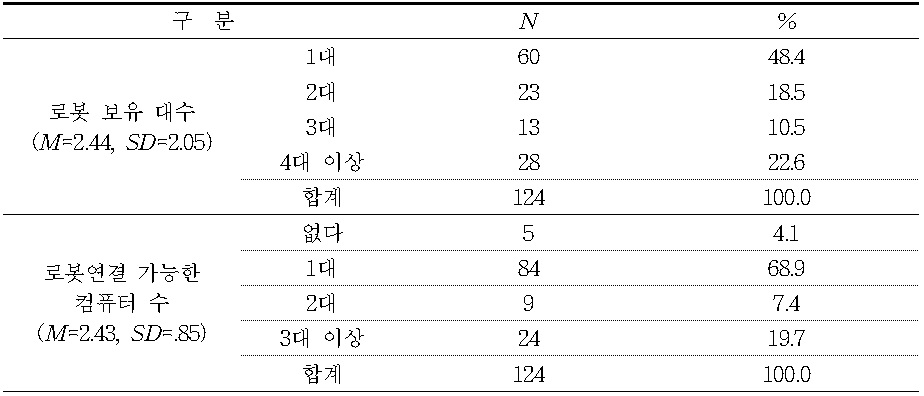
유치원에서의 로봇 보유 현황을 살펴보면 <표 3>과 같다. 로봇을 1대 보유하고 있는 곳이 48.4%(60명)로 가장 많았으며, 다음으로 2대가 18.5%(23명), 3대가 10.5%(로 가장 많은 것으로 나타났다. 로봇과 연결 가능한 컴퓨터 수는 1대가 68.9%(84명)로 가장 많았으며 다음으로 3대 이상이 19.7%(24명), 2대가 7.4%(9명)의 순으로 나타났다. 평균적으로 로봇과 연결 가능한 컴퓨터 수는 2.43대를 보유한 것으로 나타났다. 로봇과 연결 가능한 컴퓨터 수는 1대가 68.9%(84명)로 가장 많았으며 다음으로 3대 이상이 19.7%(24명), 2대가 7.4%(9명)의 순으로 나타났다.
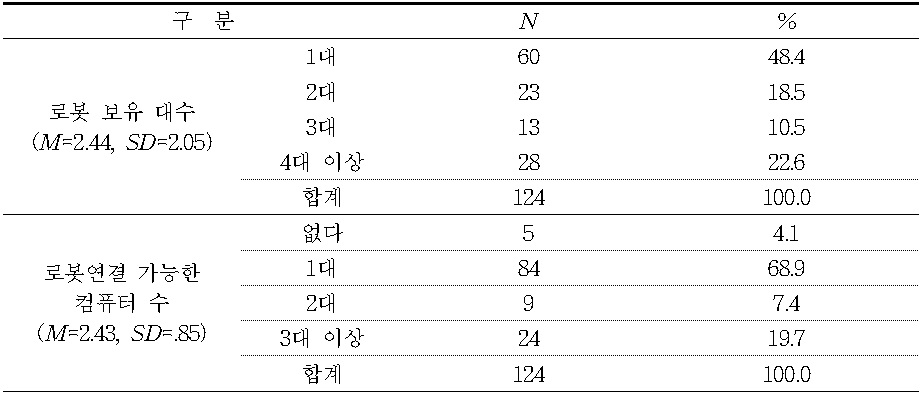
로봇기반교육과 관련된 기기 보유 현황
2) 로봇기반교육의 물리적 환경 실태
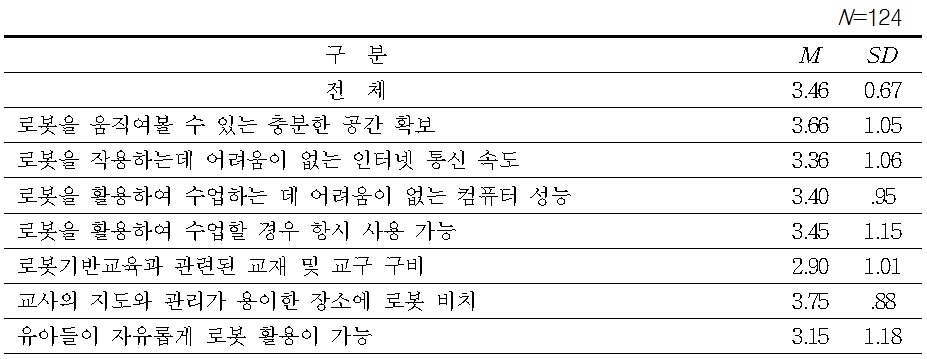
<표 4>에 나타난 바와 같이 로봇기반교육의 물리적 환경에 대해 5점 척도(전혀 그렇지 않음=1, 그렇지 않음=2, 보통=3, 그러함=4, 매우 그러함=5)로 분석한 결과, 물리적 환경에 대한 실태는 평균보다 조금 높은 것으로 나타났다(
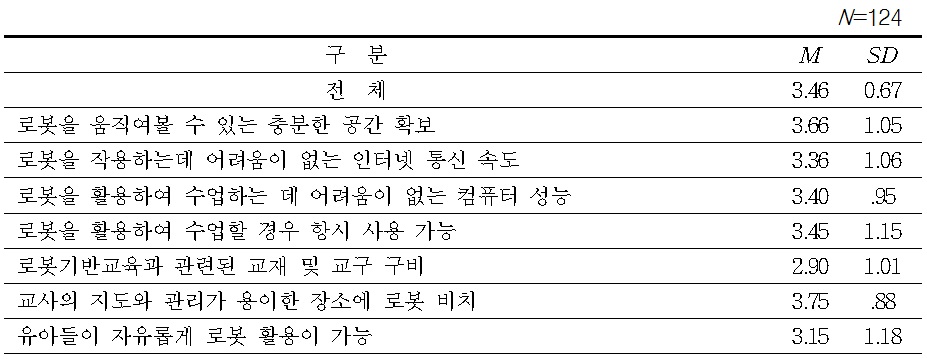
로봇기반교육과 관련된 물리적 환경
2. 배경 변인에 따른 로봇관련 기기 현황과 물리적 환경의 차이
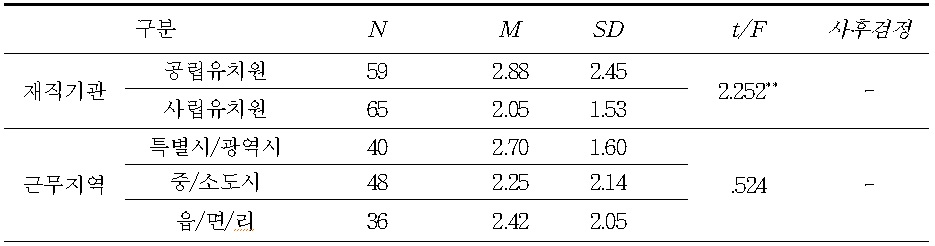
<표 5>에 나타난 바와 같이 재직기관과 근무지역에 따른 보유 로봇 수를 살펴보면, 재직기관에서는 공립유치원이 평균 2.88(
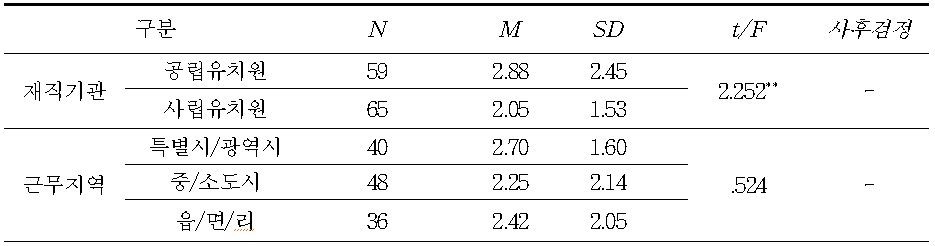
변인에 따른 보유 로봇 수
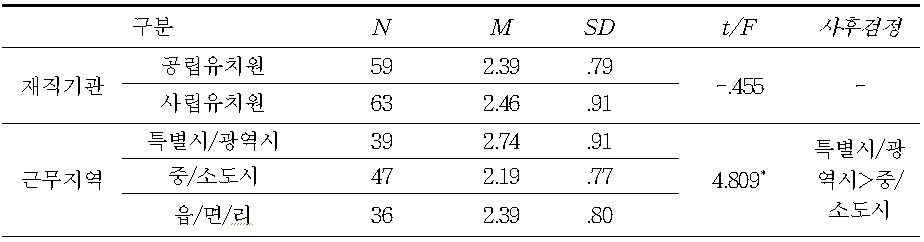
<표 6>에 나타난 바와 같이 재직기관과 근무지역에 따른 로봇과 연결하여 사용하는 컴퓨터 수를 살펴보면, 재직기관에서 공립유치원은 평균 2.39(
[<표 6>] 변인에 따른 로봇과 연결 가능한 컴퓨터 수
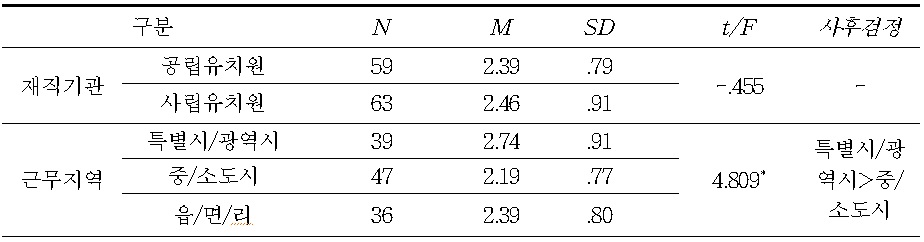
변인에 따른 로봇과 연결 가능한 컴퓨터 수
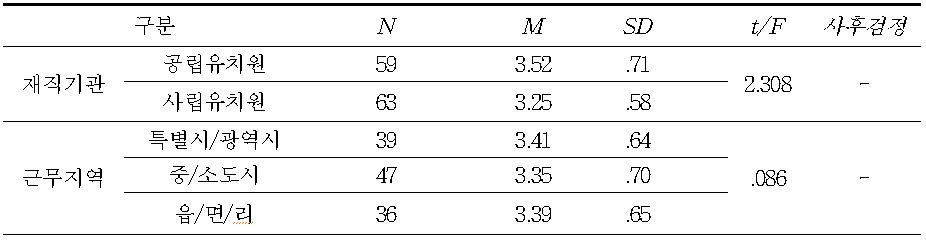
<표 7>에 나타난 바와 같이 재직기관과 근무지역에 따른 물리적 환경의 차이를 살펴본 결과, 재직기관에서 공립유치원은 평균 3.52(
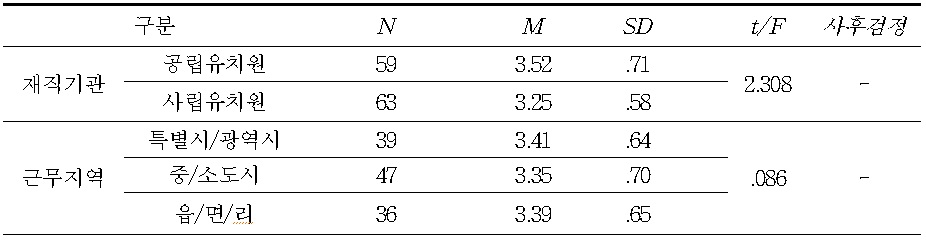
변인에 따른 물리적 환경
3. 로봇기반교육의 물리적 환경이 로봇활용 능력 및 활용 정도에 미치는 영향
1) 로봇기반교육의 물리적 환경과 로봇활용 능력, 활용 정도와의 관련성
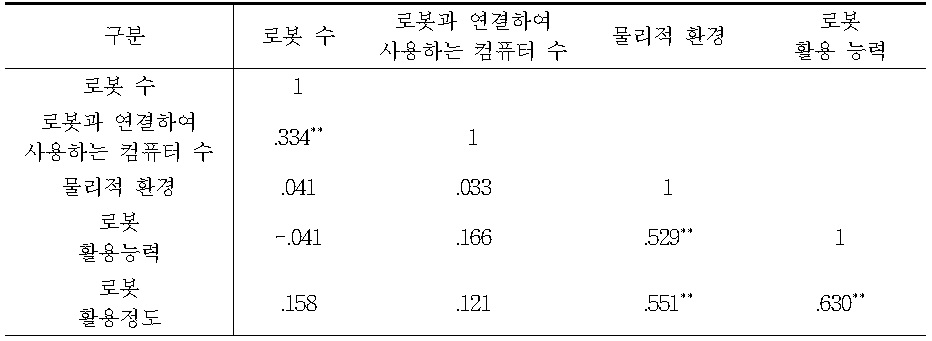
로봇기반교육의 물리적 환경과 로봇활용 능력, 수업에 로봇활용 정도와의 관련성을 살펴보면 <표 8>과 같다. 로봇기반교육의 물리적 환경과 로봇활용 능력, 그리고 로봇활용 정도가 유의하게 정의 방향으로 관련성이 있는 것으로 나타났다(
[<표 8>] 로봇기반교육의 물리적 환경과 로봇활용 능력과 활용 정도와의 관련성
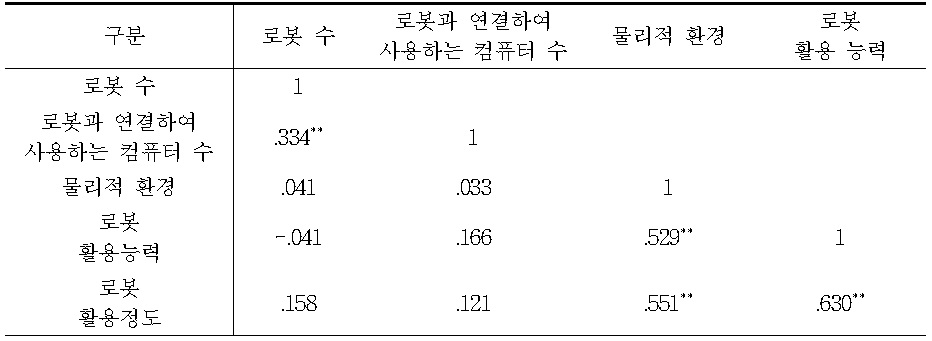
로봇기반교육의 물리적 환경과 로봇활용 능력과 활용 정도와의 관련성
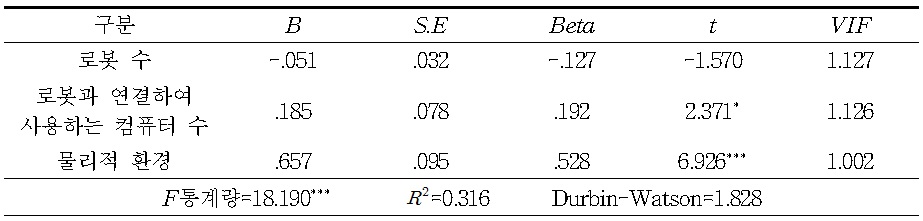
2) 로봇기반교육의 물리적 환경이 교사의 로봇활용 능력에 미치는 영향
<표 9>에 나타난 바와 같이 로봇기반교육의 물리적 환경이 로봇활용 능력에 미치는 영향을 살펴보면, 설명력은 31.6%(
[<표 9>] 로봇의 물리적 환경이 로봇활용 능력에 미치는 영향
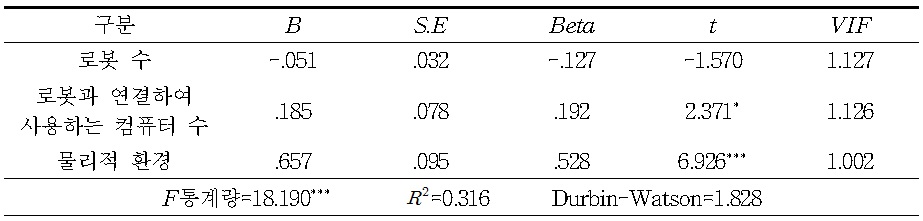
로봇의 물리적 환경이 로봇활용 능력에 미치는 영향
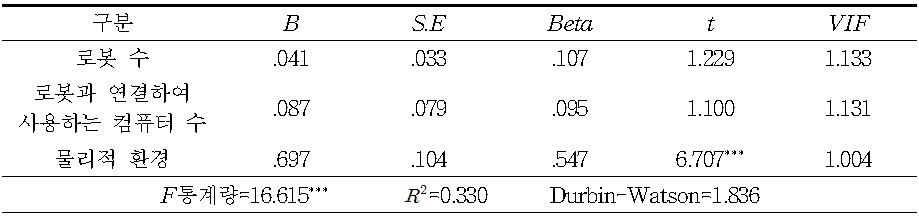
3) 로봇기반교육의 물리적 환경이 로봇활용 정도에 미치는 영향
<표 10>에 나타난 바와 같이 로봇기반교육의 물리적 환경이 로봇활용 정도에 미치는 영향을 살펴보면, 설명력은 33.0%(
[<표 10>] 로봇의 물리적 환경이 로봇활용 정도에 미치는 영향
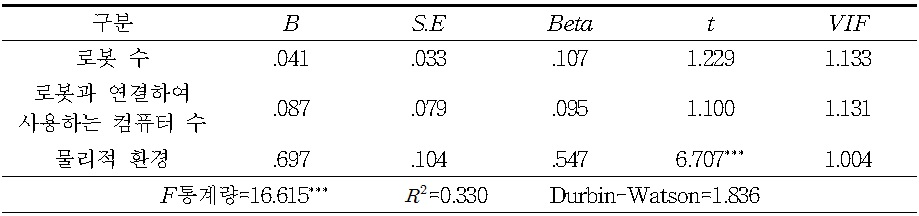
로봇의 물리적 환경이 로봇활용 정도에 미치는 영향
본 연구의 목적은 유치원 기관 내 로봇과 관련된 기기 현황과 로봇기반교육의 물리적 환경을 파악하고, 로봇기반교육의 물리적 환경이 교사의 로봇활용 능력 및 로봇활용 정도에 미치는 영향을 알아보는데 있다. 연구의 주요 결과들을 연구문제에 따라 논의하면 다음과 같다.
첫째, 로봇기반교육의 물리적 환경 중 ‘교사의 지도와 관리가 용이한 장소에 로봇 비치’가 가장 높게 나타났으며, 다음으로 ‘로봇을 움직여볼 수 있는 충분한 공간 확보’로 높게 나타났다. 반면 ‘로봇기반교육과 관련된 교재 및 교구 구비’가 가장 낮게 나타났으며, 다음으로 ‘놀이 시 유아들의 자유로운 로봇 활용’으로 나타났다.
유아들의 지식 구성에 있어 환경과의 상호작용은 중요하며, 유아들이 경험하는 환경의 질은 지식 구성과 인지발달에 결정적인 영향을 미친다(Piaget, 1962). 이렇듯 유아의 발달에 중요한 물리적 환경은 교육목표를 성공적으로 달성하도록 하는데 결정적인 역할을 하고 있는 것이라 할 수 있다(정원식, 1975). 유아의 교육환경은 유아들에게 교육적으로 영향을 미치는 외적 조건 또는 자극의 작용을 의미하므로 로봇기반교육에서도 물리적 환경이 중요함(심우경, 김민경, 2013)은 필수 명제로 여겨진다. 특히 유아교육은 통합교육으로 이루어지며, 유아-교구의 상호작용도 매우 중요한 학습 환경이 되는 것은 누구나 아는 사실이다. 하지만 본 연구에서 로봇기반교육과 관련된 교재 및 교구 구비와 유아들이 놀이 시 자유롭게 로봇을 가지고 활동하는 항목이 다른 항목 보다 낮게 나온 것은 로봇기반교육의 물리적 환경 구성에서 짚고 넘어가야 할 부분으로 사료된다. 로봇기반교육과 관련된 교재 및 교구 구비가 다른 항목에 비해 낮게 나타난 결과는 교사들이 인식하는 ICT활용교육 실시의 가장 큰 장애 요인을 적합한 소프트웨어의 부재라고 한 연구(김남진, 우정한, 2005)와 일맥상통한 결과로 여겨진다. 또한 로봇기반교육과 관련된 교재 및 교구 구비가 미비하게 나타난 것은 비단 로봇기반교육에만 국한되지는 않을 것으로 본다. 현재 유아교사는 유치원에서 많은 업무에 시달릴 뿐 아니라 과중한 업무에 수업 시 사용하는 교재 교구를 직접 제작하여 수업하기가 쉽지 않은 현실이다. 이러한 점을 감안하여 민간 교구 회사들은 주제와 연계하여 누리과정 운영을 충실히 할 수 있도록 교재 및 교구를 제작하여 시판하고 있고, 기관에서는 많이 구입하여 사용하고 있는 실정이다. 따라서 로봇회사에서도 콘텐츠 개발 시 해당 콘텐츠와 함께 사용할 수 있는 교재 및 교구도 함께 개발될 수 있도록 시스템 구축이 필요하다. 이를 위해서는 로봇 회사에서 유아교육 전공자들을 채용하여 장기적으로 온라인과 오프라인 교육이 함께 이루어질 수 있도록 해야 할 것이다. 또한 로봇기반교육 시 로봇 자체만 수업에 활용하고 끝내기보다는 로봇과 관련된 활동과 연계하거나 그 활동이 심화될 수 있도록 그에 맞는 교재 및 교구 준비가 된다면 로봇기반교육의 교육적 효과가 향상될 것으로 본다.
둘째, 재직기관과 근무지역에 따른 보유 로봇 수를 살펴본 결과, 공립유치원이 사립유치원보다 상대적으로 보유 로봇 수가 많은 것으로 나타났다. 그리고 로봇활용 수업 실행에서 사립유치원 보다 공립 유치원의 실행도가 높은 것으로 나타났다. 이러한 연구결과는 로봇 보급에 있어 공립유치원이 사립유치원 보다 앞서 보급되었다는 점(이연승, 강민정, 박선미(2013)을 감안한다면 당연한 결과이다.
로봇과 연결하여 사용하는 컴퓨터 수는 특별시/광역시가 중/소도시보다 상대적으로 많은 것으로 나타났다. 이러한 결과는 특별시나 광역시에 있는 유치원의 학급 수가 중/소도시 보다 많음을 볼 때 로봇과 연결하여 사용하는 컴퓨터 수가 많은 것은 당연한 결과로 유추된다. 아직 로봇기반교육을 시행하는 과정에 있으며 읍/면/리, 중/소도시의 경우 현재 공립유치원을 중심으로 로봇이 보급되고 있으며, 특별시/광역시는 공립유치원 뿐만 아니라 점차 사립유치원이 적극적으로 참여하고 있는 상황을 반영하고 있다는 점을 고려한다면(이연승, 염지숙, 강민정, 정지현, 임수진, 2011) 향후 로봇기반교육의 전국적 보급에 따라 사립유치원의 비율도 지역별 분포처럼 높아질 것으로 예상된다(김경현 외, 2009; 이정욱 외, 2010; 한정혜, 조미현, 2009). 따라서 향후 로봇기반교육과 관련된 정책 수립 시 로봇 뿐 아니라 로봇과 연결하여 사용하는 컴퓨터 보급에도 예산지원이 필요하며, 대도시와 소도시의 지역 차이가 나는 것을 감안하여 로봇 및 로봇과 관련된 기기 보급에도 관심을 가져야 할 것이다.
셋째, 로봇기반교육의 물리적 환경과 로봇활용 능력, 그리고 수업에 로봇을 활용하는 정도가 정의 방향으로 유의하게 관련성이 있으며, 로봇활용 능력과 로봇활용 정도의 상관계수가 매우 높은 관련성을 가지는 것으로 나타났다. 전문성을 어떤 직업이 갖는 고유한 지식과 기능(김현주, 2008)이라고 할 때, 교사가 로봇기반교육을 제대로 실행하기 위해서는 로봇을 활용하는 능력은 필요하며, 이는 로봇기반교육 실행에 있어 교사에게 요구되는 자질이다. 또한 유아교사의 R-러닝 전문성에 대해 이경옥, 이상희, 엄소명, 정다희(2012)는 유아와 로봇에 대한 기초지식과 교육과정 내에서의 로봇 활용법, 로봇 조작 기술, 로봇을 활용한 교수법, 로봇을 활용한 교실관리 능력과 더불어 R-러닝에 대한 긍정적 인식과 태도를 들고 있다.
교사의 로봇활용 능력과 수업에 로봇을 활용하는 능력이 교사의 R-러닝 전문성에 포함되는 것을 볼 때, 교사의 R-러닝 전문성과 물리적 환경과 관계가 있음을 유추해 볼 수 있다. 따라서 본 연구결과로부터 로봇기반교육 활성화를 위해 물리적 환경이 매우 중요한 요인임을 재확인할 수 있었으며, 더불어 교사의 전문성을 신장하기 위해서도 노력해야 함을 시사한다.
넷째, 로봇기반교육에서 로봇과 연결하여 사용하는 컴퓨터 수가 많을수록, 물리적 환경의 수준이 높을수록, 교사의 로봇활용 능력이 높은 것으로 나타났다. 특히, 물리적 환경이 다른 변수들보다 상대적인 영향력이 큰 것으로 나타났다. 본 연구 결과에서 로봇과 연결하여 사용하는 컴퓨터 수가 많을수록 교사의 로봇활용 능력이 높게 나타난 것은 물리적 환경 혹은 소프트웨어 구비 현황이 ICT 활용 교육에 차이를 가져올 수 있다는 Samuelson(2003)의 연구와 같은 맥락이다. 그리고 로봇기반교육의 물리적 환경이 교사의 로봇활용 능력에 영향에 미친다는 본 연구결과는 교사의 ICT활용수준에 가장 많은 영향을 미치는 요인이 물리적 환경이었다는 김기혜(2008)와 Ely(1999)의 연구를 뒷받침하고 있음을 알 수 있다.
물리적 환경이 다른 변수들보다 상대적인 영향력이 크게 나타난 본 연구결과는 교육환경 영역은 수업이 이루어지는 과정 혹은 환경에 관한 것이므로 로봇기반교육의 효과적으로 직접적으로 인식할 수 있는 특성이 있다고 한 연구(김병준, 한정혜, 2005; 현은자, 박현경, 연혜민, 장주연, 2010)와 교육 환경은 로봇기반교육에 영향력을 미친다는 연구(이정욱, 이민정, 안경숙, 임수진, 2011)와 같은 맥락이다. 물리적 환경이 교육에 중요한 영향을 미치고 있는 주요 선행연구 결과로부터 로봇기반교육에서 바람직한 물리적 환경 구성에 요구되는 지침이 필요함을 시사한다.
다섯째, 로봇기반교육의 물리적 환경의 수준이 높을수록 교사가 수업에 로봇을 활용하는 정도가 높은 것으로 나타났다. 로봇을 수업에 활용하는 정도를 알아본 연구들(이연승, 김규수, 강민정, 조혜진, 서현, 2011; 이연승, 강민정, 박선미, 2013)에서 로봇을 수업에 거의 활용하지 않는 비율이 30%가 되는 것으로 나타났는데, 이는 로봇기반교육의 물리적 환경이 교사가 로봇을 수업에 활용하는 정도와 관련이 있다는 본 연구와 같은 맥락이다. 따라서 로봇을 수업에 활용하는 정도를 현재 수준보다 높이기 위해서 즉 바람직한 로봇기반교육을 위한 물리적 환경을 마련해야 하며, 이와 함께 R-러닝 전문성을 신장을 위한 노력이 요구된다. 이러한 연구 결과에 따른 제안은 향후 로봇기반교육과 관련된 정책 수립 시 물리적 환경이 잘 구비될 수 있도록 하는 근거가 될 것으로 사료된다.
본 연구는 로봇기반교육의 물리적 환경이 교사의 로봇활용 능력 및 활용 정도에 미치는 영향을 알아보고자 하였다. 이를 위해 로봇기반교육과 관련된 물리적 환경, 교사의 로봇활용 능력, 수업에 로봇활용 정도를 알아보는 문항을 선행연구에 근거하여 연구자가 작성하였다. 하지만 물리적 환경이 교사의 로봇활용 능력과 활용 정도에 영향을 미치는 본 연구 결과로부터 로봇기반교육의 물리적 환경을 측정 할 수 있는 도구 개발이 필요함을 알았다. 따라서 향후 연구에서는 로봇기반교육의 물리적 환경을 측정 할 수 있는 도구가 개발되고, 개발된 타당화 된 도구에 의해 측정한 결과를 토대로 물리적 환경을 구비하고 조성해야 할 것이다.
또한 본 연구에 로봇기반교육의 물리적 환경이 교사의 로봇활용 능력과 수업의 활용 정도에 영향을 미친다는 연구 결과가 도출되었다. 하지만 물리적 환경의 어느 부분이 교사의 로봇활용 능력과 수업 활용에 영향을 미치는가에 대해서는 규명하지 못하였다. 따라서 향후 연구에서 타당화 된 검사 도구를 개발하고 개발한 도구를 통해 측정하여 이러한 요인들을 밝혀낸다면 로봇기반교육의 개선점 파악에 용이할 뿐 아니라 바람직한 로봇기반교육에 일조할 것으로 사료된다.