Modern multimedia technologies provide designers numerous options in developing digital environments. For example, three dimensional (3-D) dynamic environments such as virtual worlds take part in fields as diverse as Education, Business, Medical Science, and Design (de Freitas & Neumann, 2010; Spiers, Sakamoto, Elliott, & Baumann, 2008; Ozdinc, 2010). Virtual worlds have emerged as a popular trend in the recent decade due to advancements in computing technology and network infrastructure, and universities and educational institutions have recently started to study their potential for teaching and learning. A virtual world is a computergenerated, boundary-less, immersive environment often equipped with 3-D graphics resembling the real world(Mennecke et al., 2000). With unique characteristics such as navigation in a defined space crafted from artistically scaled 3-D images representing reality, these environments are becoming more popular day by day. They also play an important role in the investigation of spatial processes, such as assessing spatial abilities and informing researchers how to design realistic experiment settings (Burigat & Chittaro, 2007).
Yet, several studies have pointed to problems in 3-D environments (Cockburn & McKenzie, 2001; Ruddle et al. 1998; Gerjets & Scheiter, 2003; Huk, 2006). Navigating in a dynamic environment might cause cognitive load or disorientation problems, requiring multiple processes to cope, such as route-finding, movement processes, spatial perception, and planning movements using spatial knowledge (Paas, Renkl, & Sweller, 2003; Burigat & Chittaro, 2007; Arthur, Hancock, & Chrysler, 1997; Gerjets & Scheiter, 2003). On the other hand, static environments have been prevalent for a long time, as most web-sites and computer applications are static environments with unchanging surroundings accessed by the user. Multiple studies have focused on designing more user-friendly, effective static and dynamic environments with emphasis on user characteristics (Newby, Stepich, Lehman, & Russell, 2000; Paas et al., 2003). According to Solso et al., while designing these environments, individual cognitive characteristics and differences need to be considered which can be listed as perception, attention, conscience, types of memory, concept formation, memorization, and language and development (as cited in Mutlu Bayraktar & Altun, 2012).
Object Location Memory (OLM) span is another of these cognitive characteristics. In remembering the locations of objects during navigation, the OLM span is part of an individual’s overall cognitive ability (Lejbak, Vrbancic, & Crossley, 2009). With the help of OLM, people can recall locations of and relationships between objects within a given environment, whether really or digitally. Recent studies have demonstrated that OLM spans vary among individuals (Silverman & Eals, 1992; Kimura, 1999; Kessels et al., 2006) and that this type of memory has a significant effect on recalling spatial knowledge about objects during navigation as well as on overall navigation performance (Gallagher, Neave, Hamilton, & Gray, 2006; Choi & L’Hirondelle, 2005; McBurney, Gaulin, Devineni, & Adams, 1997; Spiers et al., 2008). While making design decisions about personalized environments, it is important to better understand how modes of environments interact with cognitive characteristics during the navigation process. The present study aims to explore the effects of static and dynamic navigation environments on learners’ spatial knowledge recall performances while considering OLM spans.
Working memory refers to the temporary storage and manipulation of information (Logie, 1995). Baddeley and Hitch (1974) proposed a working memory including two slave systems: visual-spatial sketch-pad (VSSP) and articulatory loop. While VSSP was specialized for manipulation and temporary storage of visual and spatial memory, articulatory (phonological) loop was responsible for verbal material (Baddeley & Hitch, 1994). VSSP represents visual and spatial information and distribution of objects in space (Zimmer et al., 2003). Gyeselinck et al. (2007) emphasized visuospatial working memory in mental imagery activities, thus VWVM is involved in the storage and manipulation of visuo-spatial information. However, according to Baddeley and Lieberman (1980), the VSSP was considered to be a spatial processing unit which is not related to vision. In the following period, Postma, Izendoorn, and De Haan (1998), distinguished object memory and location memory. According to Postma and De Haan (1996) spatial components are stored within the VSSP, whereas object memory (identity) is enabled by other components such as verbal memory. Recent neuropsychological experiments supported this assumption that object identity and its spatial information are processed by different neural structures (Mecklinger, 1998; Smith, Jonides, Koeppe, Awh, Schumacher & Minoshima, 1995). In the study of Smith et al. (1995), positron emission tomography (PET) measures were taken while subjects engaged in either a spatial-memory task (retain the position of three dots for 3 sec) or an object-memory task (retain the identity of two objects for 3 sec). Results showed that the spatial task activated only right-hemisphere regions, whereas the object task activated primarily left-hemisphere regions. According to Postma, Jager, Kessels, Koppeschaar, and Van Honk (2004) the ability to remember the locations of objects, object location memory, requires multiple separate processes: one has to encode the precise positions occupied, assign the object to the correct location and achieve an integration of both types of information.
In the literature, various tests have been used to measure OLM span; the first essential test was developed by Silverman and Eals (1992). In this test, participants studied an array of common objects (e.g., pencil, book, and flower) for a designated period of time; objects then disappeared and reappeared, but some positions were exchanged. Participants were required to mark the objects that changed. Accuracy of the marks indicated OLM span scores.
Most of the research conducted since the publication of Silverman and Eals`s (1992) article aimed to develop new OLM test to explain different performances among individuals. Results showed that using different kinds of objects: sex-related, common, non-sense or abstract in OLM tasks results in different recall performances (Choi and L’Hirondelle , 2005; James & Kimura, 1997; Eals & Silverman, 1994).
Postma et al. (2004) suggested that OLM may comprise three major components: 1) object processing 2) spatial-location processing and 3) binding objects to locations. Object processing requires one to recognize the objects, thereby encoding their identity (Voyer, Postma, Brake & Mcginley, 2007). Encoding the identity would be tapped by the object identity memory task. Spatial location processing can proceed both by means of exact coordinate location codes and by relative, categorical, or topological codes (Voyer et al., 2007), thus it is not necessary to object identity memory. Postma et al. (2004) suggested the last component, binding process, to establish connection between object identity memory and location memory which are separate and interdependent processes. Iachini et al. (2005) claimed that differences in OLM spans are related to the variations in the specific subcomponents of spatial memory. The above findings and discussion suggest a separation between the processes of object identity and object location or a distinction between subcomponents of spatial memory in OLM tasks. OLM tasks should require more spatially based strategies without the processes of object identity.
2.2. Object Location Memory and Sex Difference
Mcgee (1979) pointed out that there are at least two distinct spatial abilities, spatial visualization and orientation. Spatial visualization is the ability to mentally rotate manipulation and twist 2D or 3D objects. Spatial orientation is the comprehension of the arrangement of elements within a visual stimulus pattern. Mcgee (1979) claimed that the development of sex differences in spatial skills is likely related to sex differences in the development of hemisphere specialization and males have greater right hemisphere specialization than females. On the other hand, in a meta- analysis over multiple studies, Linn and Petersen (1985) argued that there are three major spatial categories; spatial perception, mental rotation, and spatial visualization. They claimed that clear sex differences were found for mental rotation tasks in the favor of males and their explanation of the observed sex differences on these tasks centers on selection and efficient application of solution strategies (Linn & Petersen, 1985). Task complexity, stimulus familiarity, and the nature of the precise processes tested could be important in this respect (Postma et al. 1998).
The studies in the literature which explore sex differences in terms of OLM spans have used different tests, leading to inconsistent results (Alexander et al., 2002, Honda & Nihei, 2009; Gallagher et al., 2006). Several researchers have claimed that sex differences in OLM tasks are consistent with the hunter-gatherer theory and accompanying social roles of early women and men (Alexander, Packard, & Peterson, 2002; Silverman & Eals, 1992). If hunters were predominantly male, then it is reasoned that selection pressures might contribute to spatial abilities in men that enhance the ability to hunt and capture animals (Eals & Silverman, 1994). If gatherers were predominantly female, then similar selection pressures may occur. The successful gathering of plant food, for example, may require abilities to identify the shape and color of edible plants and associate landmarks with their locations. In this respect, females are generally expected to be more successful in OLM span tests than males. Indeed, females tend to outperform males in several OLM tests (Silverman & Eals, 1992; McGivern et al., 1998). In a study with 250,000 pieces of collected data by BBC Internet, Silverman, Choi, and Peters (2007) assessed the universality of gender related spatial competencies and found that women scored significantly higher than men on OLM tests in all seven ethnic groups and in 35 out of 40 countries.
On the other hand, Postma et al. (2004) have defined OLM as a combination of separate processes: encoding precise positions occupied, assigning objects to correct locations, and integrating both types of spatial information. The study of DeGoede and Postma (2008) aimed to examine whether sex differences exist for these selective components of OLM. In the object-to-position-assignment condition, original positions were marked, so subjects needed only to assign the correct object to the correct position. In the positions-only condition, all objects assumed the same identity. Therefore, subjects had only to reproduce precise positions. Finally, in the combined condition, subjects were required to replace all objects without any marked positions. The findings revealed that females did as well as males in the object-to-position-assignment and combined conditions, but they were less efficient than males in positional reconstruction (Postma et al., 1998). Honda and Nihei (2009) further examined sex differences in recalling objects across time. In their study, participants studied a list of objects and were asked to recall the locations of these objects at two time intervals: three minutes and one week. Their findings indicated that females outperformed males at recognizing location-exchanged objects after three minutes, but no difference was found at one week. The female advantage was rooted in immediate detection of changes. In another study, James and Kimura (1997) studied location-exchanged and location-shifted objects in terms of gender and found that females scored higher at the recall task when the locations of pairs of objects were exchanged, but males performed better when the locations of objects shifted to sites previously unoccupied by another object. In the Location-Shift task, new locations were included in the response array and, since subjects could use information about the arrangement of filled and unfilled space in the array to solve the task, the importance of object identity information was de-emphasized. Therefore, it appears that women outperformed men on OLM tasks when object identity information is a necessary cue for solving the task (James and Kimura, 1997). The studies focusing on object manipulation in OLM tests have similar findings. For instance, Choi and L’Hirondelle (2005) found female advantages with concrete objects and greater male success with abstract objects. One explanation for this result may relate to object types used. For example, highly recognizable or sex-related objects might have an effect on performance; thus, object recognition could be an effective factor in addition to location retention. Women may outperform men on OLM tasks when object recognition takes part in solving the task.
The above findings and discussion suggest that selection and application of solution strategies have a considerable effect on OLM scores. Object recognition and object identity have noticeable effect on the performances. The process of object recognition or object identity in OLM test should be removed in order to increase the validity of the tests. Participants should perform the tests with spatially based strategies.
2.3. Comparing static versus dynamic navigation environments
Cognitive processes in navigation environments
Navigation in 3-D dynamic environments is the combination of routefinding and movement processes which require recalling a layout and embedded objects. Navigation can be defined as the process whereby people determine where they are, where everything else is, and how to get to particular objects or places (Burigat & Chittaro, 2007). Navigation behavior of users in 3-D virtual environments has been investigated to a large degree (Rizk-Jackson et al., 2006; Spiers et al., 2008; Wilson, 1999). To navigate successfully, people must plan movements using spatial knowledge gained about the environment and stored as a mental map (Burigat & Chittaro, 2007). Static environments offer different navigation tools to aid users in finding information, such as search functions, menus, buttons, tag clouds, and breadcrumbs (Nizam et al., 2012). In static environments, 2-D representations of the 3-D real world, objects do not change with the movement of the observer (Tottenham, Saucier, & Elias, 2003).
Dalgarno and Harper (2003) explained the unique characteristics of 3-D environments as fidelity (realistic display) and learner activity (view control and object manipulation). Control of view position and direction and object manipulations are the key features that distinguish 3-D environments from other environments. Essential assumptions that promote learning in 3-D environments are the user’s active involvement in exploration and smooth display of view changes (optical flow) (Wilson, 1999).
The first assumption that complete spatial cognitive model can be formed through the active exploration of a 3-D environment has been tested in various previous studies. The study carried out by Peruch, Vercher, and Gauthier (1995) found that participants who actively explored a 3D environment under their own control exhibited significantly greater spatial learning than passive viewers. However, Christou and Bulthoff (1999) could not find any significant difference between active exploration and passive viewing in the 3-D environment. Wilson (1999) also could not find any significant differences between the scores of the active and passive groups on the tests of memory for objects. In the study of Dalgarno and Harper (2004), participants explored either a version of a virtual environment based on a chemistry laboratory or the real laboratory itself and were then tested on their spatial knowledge. The participants were divided into three groups, a real lab group, a user control group who explored a virtual environment with control over their position and the ability to examine objects, and a dynamic views group who viewed an animated tour of the laboratory with control only over the pace. They could not find any significant difference between the performance of the dynamic views and user control groups. Christou and Bulthoff (1999) who had the similar findings suggested that the user interface provided for moving around and manipulating items of apparatus may have imposed an additional cognitive load on the users. However, Dalgarno and Harper (2004) replicated their study by adding a task which requires participants to learn the location of items in the laboratory and found superiority in the user control participants. Simply providing a 3D environment and allowing the learner to explore it freely without providing any tasks, goals or problems to solve appears not to result in any learning benefits over other environments.
The second assumption of spatial learning in 3-D environments implies that spatial learning will be easier if movement through the environment is shown using animated changes, rather than static images, that is, if optical flow is provided (Dalgarno et al., 2010). If smooth display of view changes contributed to spatial learning it was expected that animated views participants would have performed significantly better than static views participants. However, previous studies carried out to test this assumption have conflicting results. In the study of Peruch et al. (1995), no significant difference was found between those individuals who viewed static images and those who viewed an animated tour. On the other hand, Christou and Bulthoff (1999) found that exposure to an animated sequence of views provided significantly increased spatial learning when compared with exposure to static views. According to Dalgarno et al. (2010), animated views participants performed better than static views participants on the object location test, but there was no significant difference on the view positioning test. The lack of an advantage for animated view participants on view positioning was due to the sufficiency of the chosen sequence of static views to develop a degree of spatial knowledge. Dalgarno et al. (2010) pointed out that the importance of animated or static view depends on the structure of the environment, the choice of static views provided and the type of spatial learning. If a complex environment was used, so that it was not possible to see large parts of the environment from single vantage points, the animated views participants would have been able to score higher.
Few studies have explored how individuals’ spatial ability correlates with the effectiveness of static versus dynamic representations, and their results were conflicting. According to Froese, Tory, Evans and Shrikhande (2013), there are two possibilities: 1) dynamic visualizations help low spatial ability people more by acting as a prosthetic (the “ability-ascompensator” effect and 2) spatial ability is a prerequisite to effective use of dynamic visualizations (the “ability-as-enhancer hypothesis”). The “ability-as-compensator” effect suggests that individuals with low spatial abilities benefit from dynamic representations because the visualizations provide an external resource that helps to create a mental model of a process. Previous studies found evidence that individuals with low spatial abilities benefit more from dynamic representations (Hays, 1996; Lee, 2007; Hoffler, 2010). On the other hand, the “ability-as-enhancer” theory suggests that individuals with high spatial abilities benefit from dynamic representations because they already have effective mental models to process 3-D information, whereas individuals with lower spatial abilities do not benefit from such visualizations because they lack these effective mental models (Froese et al., 2013). In the study of Huk (2006) individuals with higher spatial abilities performed better overall with dynamic than static visualization, but individuals with low spatial abilities performed better with static visualizations. In another study, individuals with low spatial ability benefited from static views, but a disadvantage was found for people using dynamic views (Garg, Norman, Spero & Maheshwari, 1999). Cohen and Hegarty (2007) suggest that individuals with high spatial ability are more likely to use animation effectively and individuals with low spatial ability are more likely to get disoriented with the animation. According to Mcgee (1979), there are two main spatial factors that affect individual performances: spatial visualization and spatial orientation. Spatial orientation is the ability to imagine the appearance of objects from different orientations of the observer. Individuals who perform recalling the locations of objects in dynamic environments also need to have this ability, spatial orientation, in order to not become disoriented. This assumption suggests that individuals with low spatial abilities cannot benefit from dynamic environments as effectively as individuals with high spatial abilities (Cohen & Hegarty, 2007).
Sex dif ferences in Navigation Environments
Several studies have explored the gender differences of spatial knowledge gained during navigation. For instance, Rizk-Jackson et al. (2006) designed a virtual reality world called “Memory Island” to examine performances of spatial knowledge. First, participants were asked to wear a headmounted display system and navigate to a location visibly marked with a flag; later, they were asked to relocate the target to its previous place without the flag marker cue. The findings pointed out gender differences in performances: females had fewer successful trials than males. In an earlier study, Tottenham et al. (2003) used a computerized adaptation of a game to test OLM span in both static and dynamic environments and found a female advantage, regardless of the presentation environment. In another study, Spiers et al. (2008) examined sex differences in a 3-D virtual grocery store. Participants were instructed to locate and retrieve 12 specifically listed grocery items, and females outperformed males. Spiers et al. (2008) suggested that females generally may be more likely to go grocery shopping than males in the real world and thus are culturally or experientially predisposed to have “grocery store” schemas. According to Christou and Bulthoff (1999), the degree or extent of learning and that human mental representation in 3-D environment may reflect varying degrees of view dependency, depending on the extent and quality of one’s visual experience. On the other hand, in their study of Tlauka, Brolese, Pomeroy and Hobbs (2005), male and female participants explored two large scale virtual shopping centers and their spatial knowledge was then tested. Differences were observed across a wide range of spatial tasks, with females’ performance being inferior during both encoding and retrieval of spatial knowledge.
According to Siegel and White s model of spatial learning in navigation environments (Siegel & White, 1975), individuals mentally build up three different representations depending on the kind of information they select: landmark, route and survey. Landmarks provide visual but not spatial cues for navigating. A route representation is based on land-marks, on routes they connect them and on the order of route turns (Iachini et al., 2005). A survey representation is a global, map-like representation of the environment. According to this model, individuals prefer different strategies while navigating which result in various performances. Iachini et al. (2005) distinguished the processing components involved in OLM by considering the strategies underlying the performance. In their study, they joined the Siegel and White`s model with the distinction (object identity, spatial location, integration) proposed by Postma and De Haan (1996) and explored the individual differences. Results showed that the male advantage in object location memory is not a general memory effect but is selectively linked to the ability to process the metric structure of the spatial relationships present in the environment and of the whole configuration of objects.
Previous studies have implied that cognitive and sex-based differences exist among learners and that these differences might interfere with their interactions, depending on the modalities of the navigation environments (Harper, 2004; Totenham et al. 2003). To navigate successfully, people must plan movements using spatial knowledge they gain about the environment, requiring activation of OLM spans. So far, the bulk of the literature has focused on differences among people according to OLM span and sex; however studies adding the variable of navigation environment are sparse. The current study, therefore, explored the effects of static and dynamic navigation environments on spatial knowledge recall performance, taking OLM spans into account. It also explored how those two types of navigation environments affected recall performance of spatial knowledge when OLM spans (low vs. high) were controlled. Finally, gender differences in those environments were examined and compared across navigation environments and in light of OLM span.
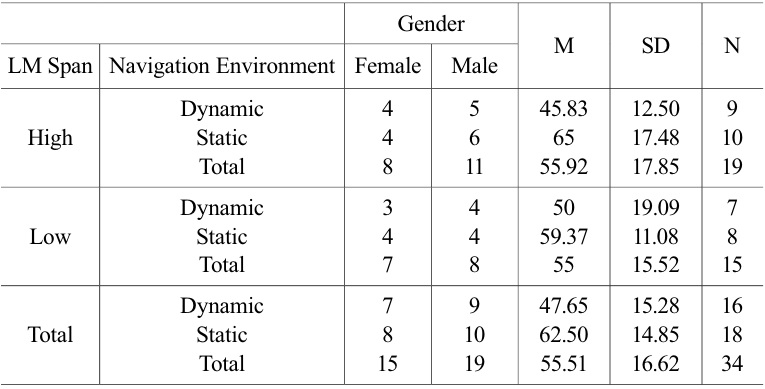
The present study was designed as a 2x2 nested-ANOVA design. Factors included location memory (LM) span (high and low) and navigation environment (static and dynamic). Each navigation environment was nested in the LM span groups. A total of 80 undergraduate students (females = 36, males = 44) studying Computer Education and Instructional Technology at a state university participated in the study. After LM spans were determined using a location memory test designed by the researchers, participants with average scores were excluded, and remaining participants (n=34) were divided into high (n = 19) and low (n = 15) span groups (see Table 1). Then, students were presented with either a static or dynamic navigation environment to test spatial knowledge recall performance.
[Table 1.] Descriptive statistics of participant LM spans
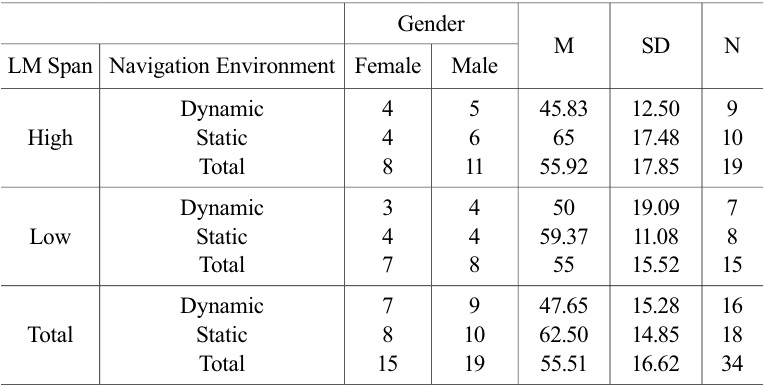
Descriptive statistics of participant LM spans
3.2. Data Collection Instruments
Object Location Memory Test.
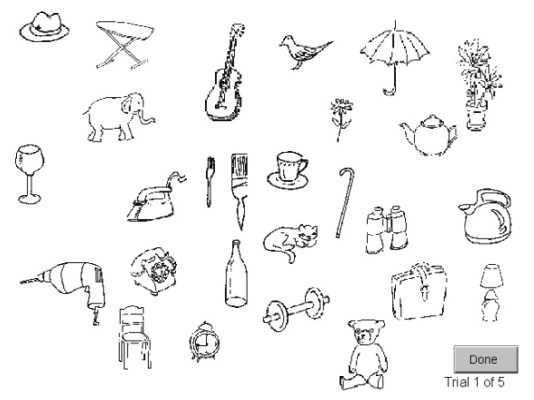
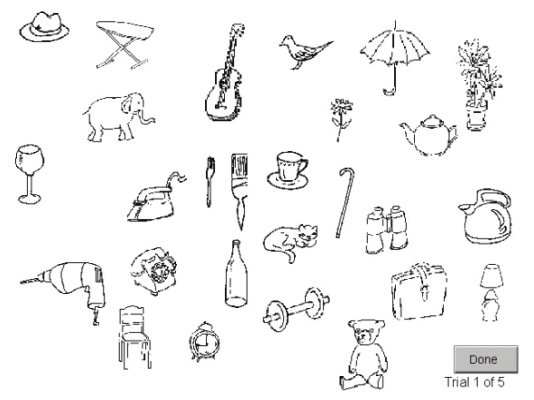
This test was administered to establish Parallel-Forms reliability analysis of the test developed by the researchers. The OLM Test was originally developed by Silverman and Eals (1992) for the purpose of measuring the abilities of people to recall the locations of specific objects arranged in a row. In this study, a software version of the paper test was used (Flannery & Eddy, 1999). After 27 commonly used objects were presented on a computer screen, the places of 14 objects were exchanged; the participants were asked to mark the repositioned objects (see Figs.1 and 2). Once the test was completed, a Discriminant Point (DI) score for each participant was calculated using a formula based on Signal Detection Theory (Silvermand & Eals, 1992). The clicking rate (CR) and false alarm rate (FR) of the individuals were required in order to determine DI. The clicking rate was obtained by dividing the number of correctly marked objects into the total number of objects. The false alarm rate was obtained by dividing the number of incorrectly marked objects into the total number of objects. DI was calculated using CR and FR with the following formula:

Location Memory Test.
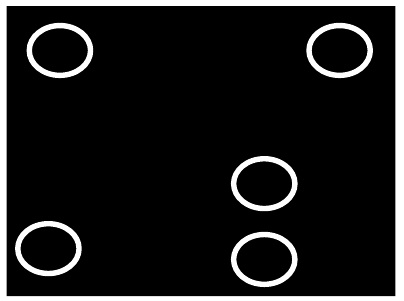
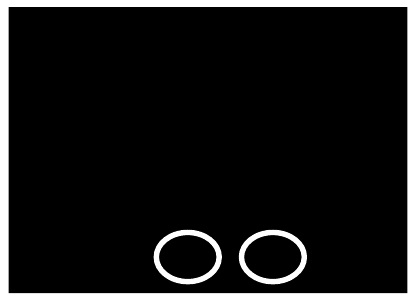
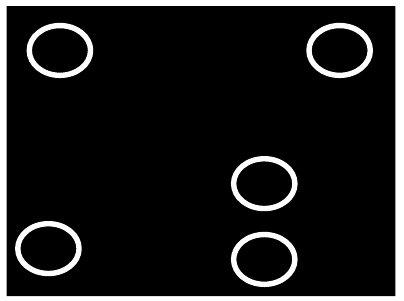
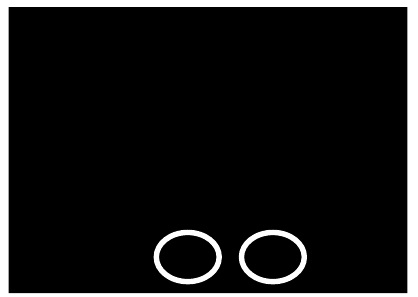
The researchers developed a Location Memory (LM) test adapted from Hampton and Shettleworth’s (1996) DNMTS (delayed-non-match-to-sample) test instead of using the OLM test of Silverman and Eals (1992) to reduce object recognition effects. The new test excluded gender-related and common objects, reducing external factors that affect recall performance. The purpose of the test was to measure OLM spans without cues such as patterns or features of the objects. Five blank circles in a 5x5 matrix were shown one by one over two-second intervals (see Fig. 3). Following a 10 second break, one circle appeared in a previously used location, while a second was shown in a new location, (2x) alternative forced choice between one correct and one incorrect location (see Fig. 4). The participant was asked to mark the circle in the correct location (see Fig. 4). This task was repeated five times, and scores were calculated by subtracting the number of correct answers from the number of incorrect answers.
Kuder–Richardson Analysis was applied to assess the internal consistency of the test, which was found to be 0.88, indicating high internal consistency. Furthermore, to determine and interpret the relationship between the OLM Test of Silverman and Eals (1992) and the Location Memory test, Pearson’s correlation coefficient was calculated. A positive and significant relationship was found (r=.426, p<.05), showing consistency between tasks aimed at measuring OLM spans. The correlation between the two parallel forms is the estimate of reliability.
Spatial Knowledge Recall Performance Task.
The researchers also developed a task to measure participants’ spatial knowledge recall, administered following the navigation task. Participants were informed before the navigation performance that they were going to be tested for the recall of object locations. The test includes 20 multiple- choice questions and 4 responses for each question. Participants were presented with static scenes from the prior navigation task, where objects remained in their original locations or were location-shifted. Participants were asked to indicate the scenes in which objects remained in their initial places. The number of the correct responses was the total score of the recall performance task. The duration of the test was 20 minutes.
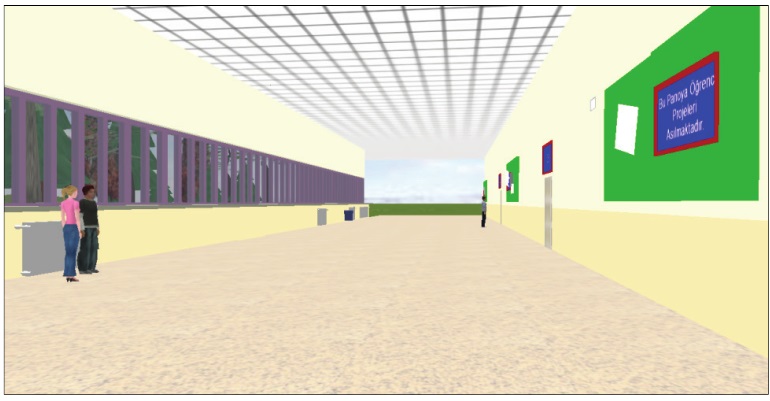
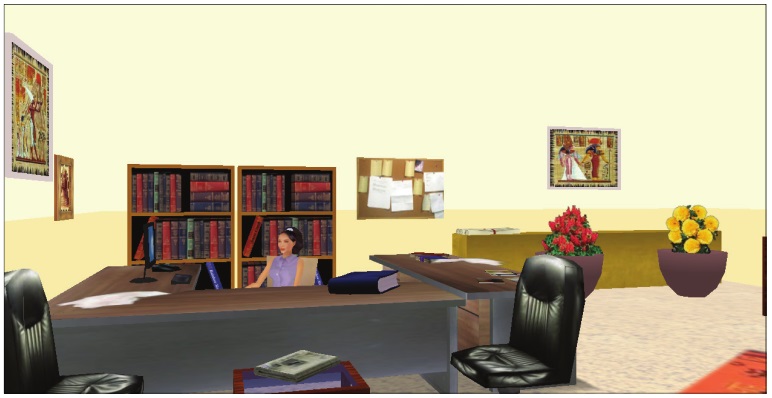
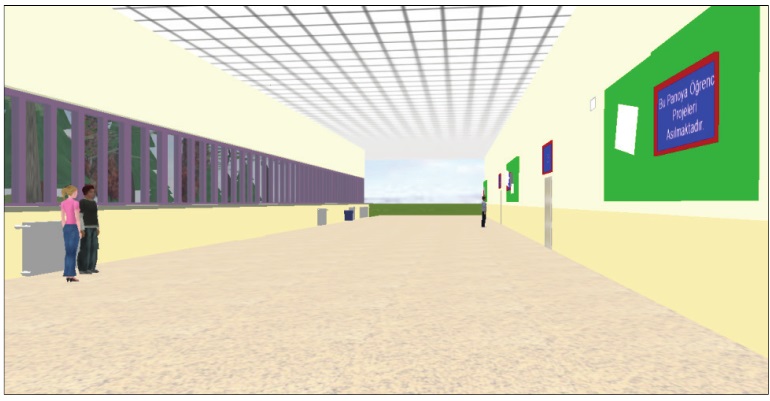
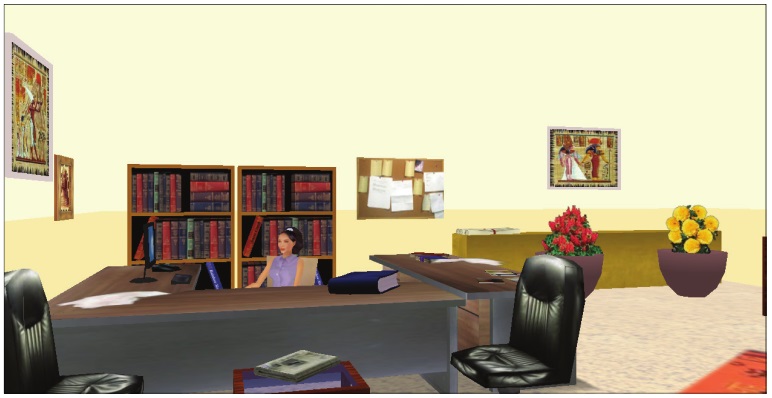
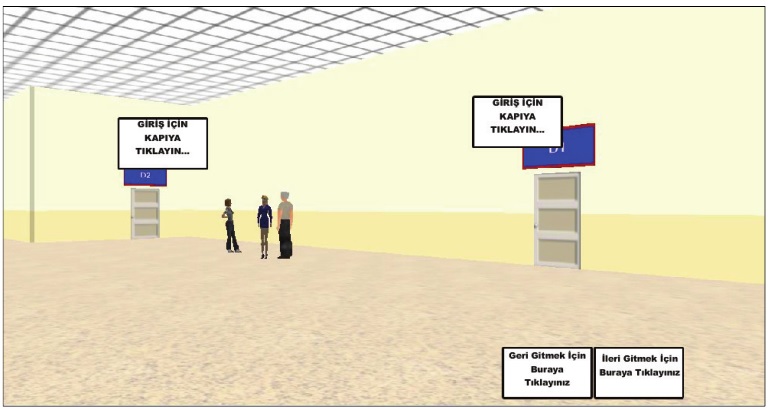
Both static and dynamic environments were used for the navigation task. The 3-D virtual world known as “BOTE” and developed by Ozdinc (2010) served as the dynamic environment. Participants were able to navigate virtual characters or avatars in BOTE, which represented a school environment consisting of classrooms, offices, laboratories, and hallways (see Figs. 5 and 6). Participants moved their virtual characters through the dynamic environment by pressing arrow keys on their keyboards.
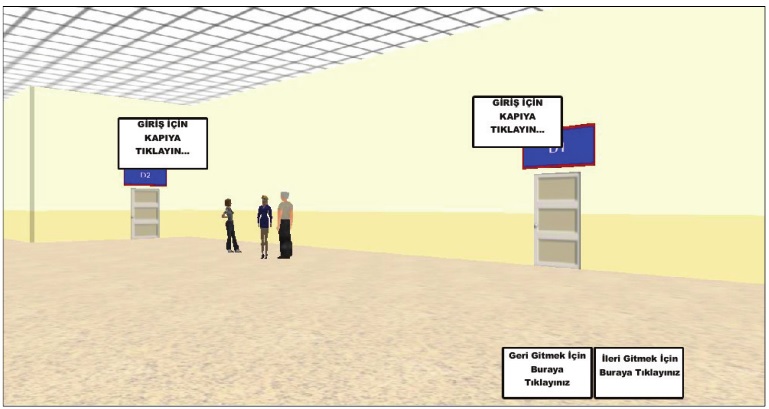
For the other, static environment, the researchers modified the content from the 3-D environment (see Fig. 7 and 8). Navigation in the static environment was maintained with “forward” and “back” buttons; however, navigating dynamically is impossible. Locations or sizes of objects did not change according while navigating. Static images were used from different viewpoints.
All students were familiar with navigation in static and dynamic navigation environments and their interface proficiency were quite similar. Interface proficiency refers to participants’ ability to use the keyboard keys to navigate through the environments.
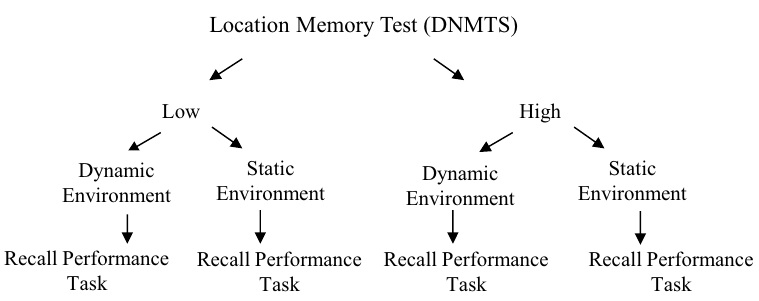
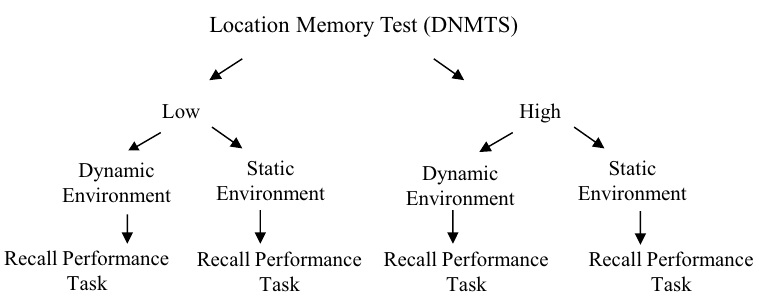
First, the Location Memory Test was administered to participants individually in a computer lab. Students who scored over the sum of the mean value and standard deviation (M+SD) were categorized as “high span,” and students who scored below the subtraction of the standard deviation from the mean value (M-SD) were “low span.” During the study phase, each group was divided again. While 9 high span students navigated the dynamic environment, the other 10 performed tasks in the static environment. Similarly, 7 low span students navigated the dynamic environment, with 8 in the static environment. The maximum navigation time was 20 minutes. Finally, students were asked to complete the spatial knowledge recall task. Fig. 9 outlines the entire process.
In this study, the dependent variable was the spatial knowledge recall score. For the first research question, navigation environments as an independent variable had two factors: static and dynamic. LM span, the other independent variable, also had two factors: low and high. Nested variance analysis was applied to these independent variables, including the nesting of LM spans on navigation environment sub-factors.
A nested design is used for experiments in which there is an interest in a set of treatments and the experimental units are sub-sampled. Montgomery claimed that if any of the sub factors of a factor do not appear at the same time with several of the sub-factors of the second factor, this factor is nested in the second factor (as cited in Mutlu Bayraktar & Altun, 2012).
To address the second research question, the Mann-Whitney U test was conducted to investigate differences in recall performance in terms of the gender factor. Non-parametric test was conducted due to the small sample size of the each treatment groups. Non-parametric tests do not have stringent requirements and suitable for the sample size less than a dozen values (Pallant, 2007).
The first research question in the present study required an exploration of the effects of different navigation environments on recall performances of students with varying LM spans. Tests for equality of variances and normal distribution were carried out before data analyses; the distribution was normal and the assumption of equity of variances was provided (
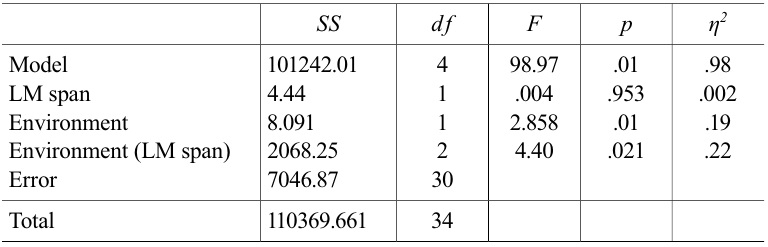
[Table 2.] Nested ANOVA results.
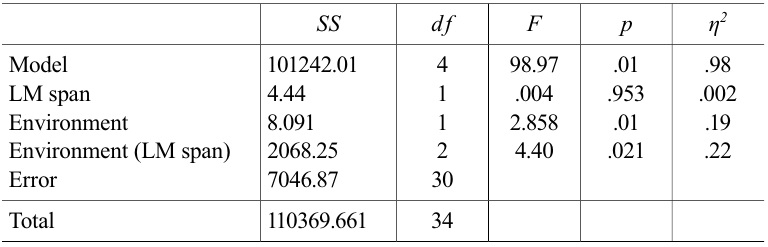
Nested ANOVA results.
[Table 3.] Test of between-subjects effects (environment and LM).
Test of between-subjects effects (environment and LM).
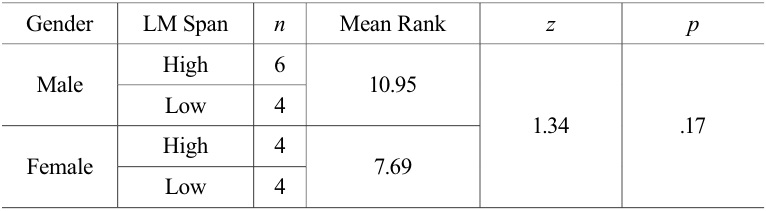
For the second research question, the Mann-Whitney U test was conducted to analyze significant differences in terms of gender between the two environment groups. There was no significant difference
[Table 4.] Mann-Whitney U results in static environment.
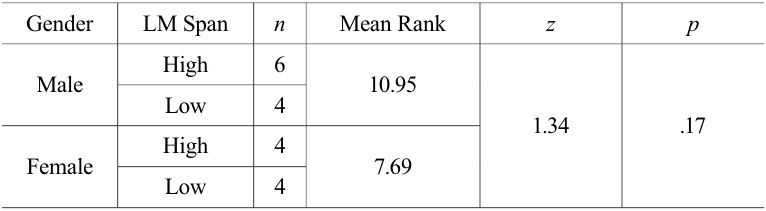
Mann-Whitney U results in static environment.
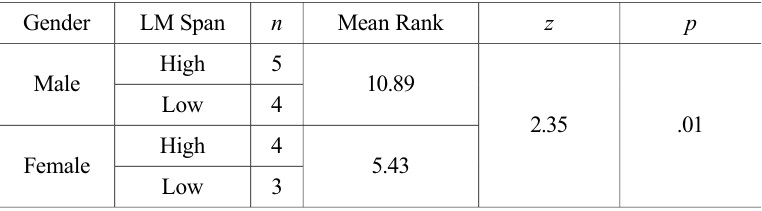
[Table 5.] Mann-Whitney U results in dynamic environment.
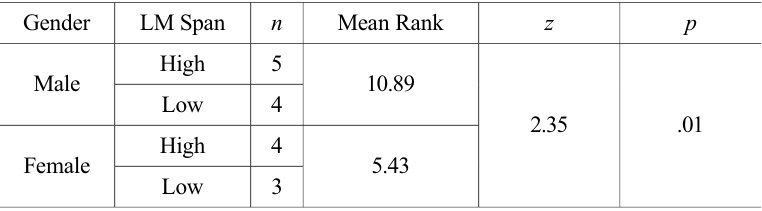
Mann-Whitney U results in dynamic environment.
Spatial ability is the capacity to understand and remember spatial relations among objects and is considered an important factor in several activities. Object Location Memory, one type of spatial ability, can affect many activities, such as navigation, spatial knowledge recall. In the literature, OLM represents specific individual differences that culminate in various results (Tottenham et al., 2003; Dalgarno & Harper, 2004).
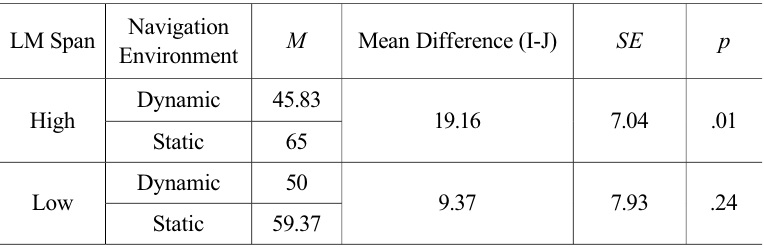
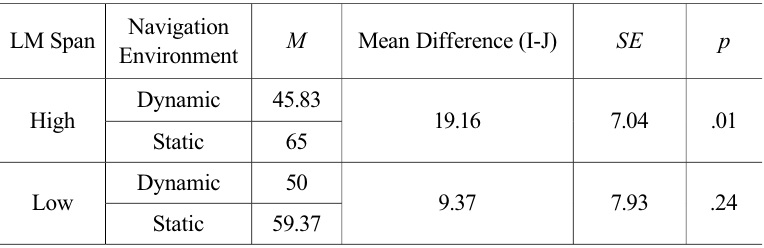
In the present study, students were split into two groups according to LM spans, high or low, and their spatial knowledge recall performances were investigated in either static or dynamic navigation environments. No significant difference was found in the LM span groups in terms of spatial knowledge recall performances. On the other hand, participants in the static environment outperformed participants in the 3-D dynamic environment in terms of recall performance. This result is against the assumption that smooth display of view changes, dynamical views, contributed to spatial learning (Dalgarno, 2010). Dalgarno and Harper (2004) explained this result as allowing a learner to explore a 3-D environment freely without providing any interactivity does not result in any learning benefits over simple animations. Although participants were asked to recall the content of the scenes during the navigation process, there were not any interactions with the navigation environment. Moreover, user interface which provides moving around dynamically may impose an additional cognitive load on the users (Bulthoff, 1999). The lack of an advantage for dynamic navigation participants may be due to the sufficiency of the chosen sequence of static views to develop a degree of spatial knowledge.Dalgarno et al. (2010) pointed out that the importance of animated or static view depends on the structure of the environment, the choice of static views provided and the type of spatial learning. If a complex environment was used, so that it was not possible to see large parts of the environment from single vantage points, the animated views participants would have been able to score higher. On the other hand, although participants had sufficient time to navigate and memorize the locations of the objects, it should be pointed out that viewpoints used in the spatial knowledge recall tests may have not been the viewpoints seen by the participants in the dynamic environment. Using spatial knowledge recall task with the static scenes for the dynamic group is one of the limitations of the present study. Individuals who perform recalling the locations of objects in dynamic environments also need to have ability of spatial orientation and mental rotation in order to imagine the appearance of objects from different orientations of the observer (Mcgee, 1979). Further, Tottenham et al. (2003) observed that a dynamic environment requires participants to remember relative positioning of objects with regard to each other, as absolute positions change constantly while navigating. At the same time, navigating a dynamic environment requires multiple spatial abilities, the lack of which can result in negative effects on recall performances.
Nesting the location memory span across navigation environments caused a significant effect on recall performances. A static environment advantage was found in the high LM span group, but not in the low LM span group. According to the “ability-as-compensator” theory, individuals with low spatial abilities benefit from dynamic representations much more than individuals with high spatial abilities, because the visualizations provide an external resource that helps to create a mental model of a process. In the present study, high span benefited from static environment rather than dynamic environment, however low span group did not benefit from dynamic environment. Lee (2007) also found evidence supporting the ability-as compensator effect but found that dynamic representations make no difference for individuals with high spatial abilities. In the study of Froese et al. (2013), participants received little benefit from 3-D dynamic visualizations, whereas they received more benefit from the static environment. They suggested an explanation that 3-D task was too long and complex, thus participants became tired and rushed the drawings and therefore scored lower. In the present study, performance task required the processes of object identity and object location, thus participants performed the processes of object recognition and spatial learning together which makes the process more complicated.
Several researchers have claimed that sex differences in human spatial abilities are consistent with predictions of the hunter-gatherer theory and hypothesized social roles of early women and men (Alexander et al., 2002; Silverman and Eals, 1992). For example, if gatherers were predominantly female, then selection pressures might contribute to a female advantage on spatial tasks such as recalling landmarks while navigating. Numerous studies have demonstrated female advantages in recalling locations of objects (Silverman & Eals, 1992; Kimura, 1999; Kessels, 2006), but studies exploring gender differences in terms of recall performances in various navigation environments are few and have inconsistent results. Tottenham et al. (2003) and Spiers et al. (2008) observed a female advantage in recall performance tasks in both static and dynamic versions of tasks; however, Rizk-Jackson et al. (2006) observed male advantages in recall performances in a dynamic environment. In the present study, males outperformed females in the dynamic environment, but no significant difference was found in the static environment. Inconsistencies with the findings of Spiers et al. (2008) could relate to the objects used in their recall tasks. Spiers et al. (2008) used feminine objects, which could lead to female advantages. Some studies have found that the type of object (feminine, masculine or neutral) plays an active role in the recall performances of participants (Choi & L’Hirondelle, 2005; Alexander, 2005). Under conditions in which participants do not have a tendency towards given objects, they might apply a more spatially-based strategy. On the other hand, individuals follow different strategies while navigating in dynamic environments. According to Siegel s model, individuals mentally build up three different representations depending on the kind of information they select: landmark, route and survey. While landmarks provide visual but not spatial cues for navigating, a route representation is based on land- marks, on routes they connect them and on the order of route turn. Schmitz (1999) claims that while females prefer a landmark based strategy, males prefer route-based strategy. Postma and De Haan (1996) also suggests that male advantage in OLM is not a general memory effect, but is linked to the strategies males select during navigation, spatially based strategy. In the present study, no significant difference was found between females and males in the static environment. Static navigation requires navigation through static views, however dynamic navigation includes the process of following routes, optical flow and dynamical view changes. In the performance recall test, dynamic group also need to imagine the appearance of objects from different orientations (spatial orientation) and rotate mental representations of 2-D and 3-D objects (mental rotation). Spatial visualization requires both rotation and the performance of serial operations (Mcgee, 1979). In a meta-analysis of multiple studies, sex differences were found for mental rotation tasks in the favor of males (Linn & Petersen, 1985). Moreoever, spatial abilities are known to be influenced almost as much by genetic factors as is verbal ability in all populations studied (Mcgee, 1979). In the present study, the effect of verbal ability and other spatial abilities also should be pointed out.
In conclusion, 3-D dynamic environments are becoming more prevalent around the world, especially virtual environments such as Second Life or Active Worlds. However, individual performance in these environments will vary. Object Location Memory is one type of cognitive ability interacts with the type of navigation environment, and this interaction can play an active role in recall performance. The results of this study showed that participants in a static environment had better recall performances than participants in a 3-D dynamic environment. In the future, studies could focus on design principles and navigation support in 3-D dynamic environments to reduce its problems. Plus, cognitive differences such as mental rotation, spatial orientation, or object recognition may affect recall performance and could be a focus of future studies.
A limitation of this study is that convenient sampling was used: participants were from the same department of the same university. The study should be replicated with students from various majors or schools. In addition, although the study started with 80 participants, nearly half were eliminated when categorizing groups by high and low LM spans. Analyses comparing female and male participants are of very limited validity because of the limited number of participants; thus a non-parametric test was conducted to test the differences. Moreover, increasing the number of factors reduces the sample size per cell to a small number and raises potential power issues. The study can be replicated using parametric statistical analysis with more participants. On the other hand, although there is a correlation between LM task and Silverman and Eals test, the concurrent validity is relatively low. While one test requires the processes of object recognition and object location exchange, the other requires more spatially based strategy and the process of object location shift. Low correlation is may be due to the differences in the processes they underpin.