This paper focuses on the generation algorithm of BeiDou pseudorange correction (PRC) and simulation based performance verification for design of Differential Global Navigation Satellite System (DGNSS) reference station and integrity monitor (RSIM) in order to prepare for recapitalization of DGNSS. First of all, it discusses the International standard on DGNSS RSIM, based on the interface control document (ICD) for BeiDou, estimates the satellite position using satellite clock offset and user receiver clock offset, and the system time offset between Global Positioning System (GPS) and BeiDou. Using the performance verification platform interfaced with GNSS (GPS/BeiDou) simulator, it calculates the BeiDou pseudorange corrections , compares the results of position accuracy with GPS/DGPS. As the test results, this paper verified to meet the performance of position accuracy for DGNSS RSIM operation required on Radio Technical Commission for Maritime Services (RTCM) standard.
위성항법시스템(Global Navigation Satellite System, GNSS)은 미국의 GPS, 러시아의 GLONASS, 유럽연합(EU)의 Galileo, 그리고 중국의 BeiDou 시스템으로 다양화되고 있는 추세이다. 현재 우리나라에서는 GPS, GLONASS, BeiDou 위성항법시스템이 가용하며, 특히 중국 BeiDou 위성항법시스템은 2012년 초기운영서비스(Initial Operational Capability, IOC)를 시작으로 2015년 현재 16기(정지궤도 5기, 중궤도 11기)의 항법위성을 운영 중에 있다. 평균 6~8개의 위성신호를 추적할 수 있으며 이를 기반으로 항법서비스의 이용이 가능한 상태이다. 이러한 GNSS 다양화 추세에 발맞추어 위성항법보정시스템(Differential GNSS, DGNSS) 및 보정 서비스를 위한 신규 국제 표준을 준비하고 있다. DGNSS 기준국 운영 및 보정서비스를 위한 신규 RSIM 1.3버전[1]과 RTCM 2.4버전[2]이 RTCM (Radio Technical Commission for Maritime Services)에서 초안을 준비하였으며, 공표를 위한 최종 의견을 수렴하고 있다. 따라서 DGNSS RSIM (Reference Station and Integrity Monitor) 운영 및 보정정보 서비스를 위한 멀티 GNSS 보정정보 생성 기법이 요구되는 실정이며, 이를 위해 본 논문에서는 BeiDou 의사거리 보정정보(Pseudorange correction, PRC) 생성 기법에 대해 다룬다. 기존 DGNSS 서비스를 위한 GPS, GLONASS, Galileo 의사거리 기반 보정정보 생성 기법[3]에 관한 연구결과가 제시되고 있지만, 중국 BeiDou 위성신호의 의사거리 보정정보 생성 기법에 관한 연구와 그 성능검증 결과는 아직 부족한 실정이다. 특히 BeiDou 궤도력 정보와 원시계측정보 획득을 위해서는 기준국 수신기의 출력정보를 해석해야 하지만 아직까지 수신기 제조사에서 BeiDou 관련 정보를 명확히 제공하지 못하고 있는 실정이다.
본 논문에서는 GPS/BeiDou 시뮬레이터를 연동하여, BeiDou 수신기에서 제공하는 항법수신정보를 BINEX (Binary Exchange Format) [4]를 이용하여 수신하고, BeiDou 항법시스템의 의사거리 보정정보 생성 알고리즘 설계 및 그 성능검증을 실시한다. 본 논문의 결과는 향후 신규 표준 기반의 DGNSS RSIM 재구축에 활용되어 우리나라 DGNSS 기준국 시스템의 독자 운영 및 성능 고도화에 기여할 수 있을 것이다.
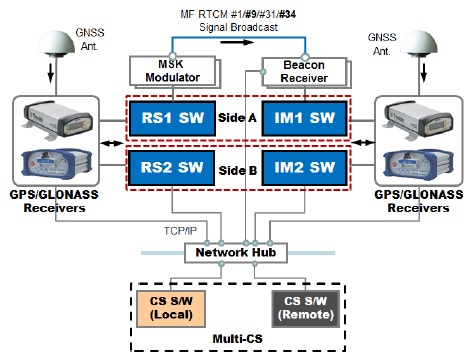
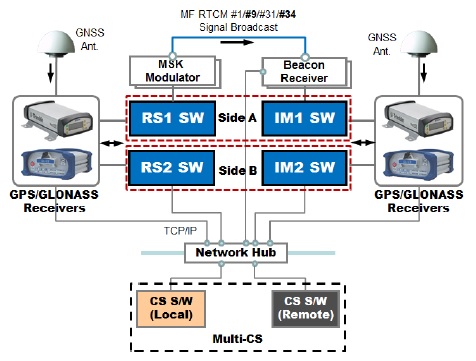
현재 운영 중인 DGNSS 기준국 아키텍처는 그림 1과 같다. 기존 RTCM의 DGPS RSIM 아키텍처와 동일한 구조이며, 보정정보를 생성하여 방송하는 기준국(Reference Station, RS)과 무결성을 감시하기 위한 감시국(Integrity Monitor, IM), 그리고 기준국과 감시국을 제어하기 위한 제어국(Control Station, CS)으로 구성된다. 기준국에서 DGPS 보정정보는 RTCM 메시지 #1, #9번을 이용하여 방송하고, DGLONASS 보정정보는 #31, #34번 메시지를 이용하여 방송한다. 그러나 아직까지 기준국 운영을 위한 RSIM 메시지는 DGPS만을 위한 RSIM 1.2버전[4]이 표준이며, DGNSS RSIM을 위한 표준은 RTCM에서 논의되고 있는 실정이므로 DGLONASS RSIM 메시지는 자체적으로 생성하여 처리하고 있다.
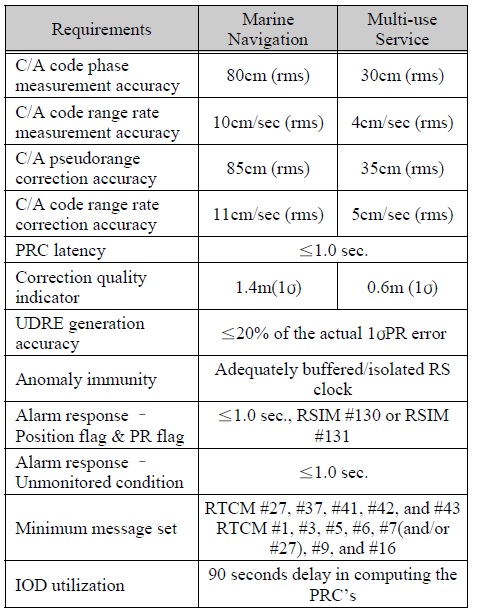
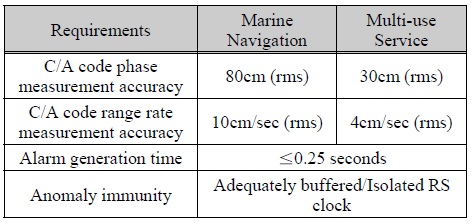
DGNSS RSIM 운영을 위한 기준국(RS) 요구성능[1]을 나타내면 표 1과 같다. 해양항법을 위한 코드측정 정확도는 80cm (rms), 의사거리 정확도는 85cm이며, 다목적 서비스를 위한 코드측정 정확도는 30cm (rms), 의사거리 정확도는 35cm 이내여야 한다. 또한 보정정보(PRC) 생성을 위한 지연시간은 1초 이내, UDRE(User Differential Range Error) 정확도는 1σPR 오차의 20% 이내여야 한다. 표 2는 DGNSS 감시국(IM)의 요구성능[2]을 나타낸다. 기준국(RS) 요구성능과 마찬가지로 해양항법을 위한 코드측정 정확도는 80cm (rms), 의사거리 정확도는 85cm이며, 다목적 서비스를 위한 코드측정 정확도는 30cm (rms), 의사거리 정확도는 35cm 이내여야 한다. 또한 무결성 검사에서 이상 검출시 0.25초 이내에 알람을 발생해야 한다. 현재 운영 중인 DGNSS 기준국 시스템의 성능은 RTCM의 RSIM의 요구성능을 충족시키도록 설계되어 있으므로 기준국 관점에서의 모든 성능을 충족시킬 수 있도록 설계해야 한다.
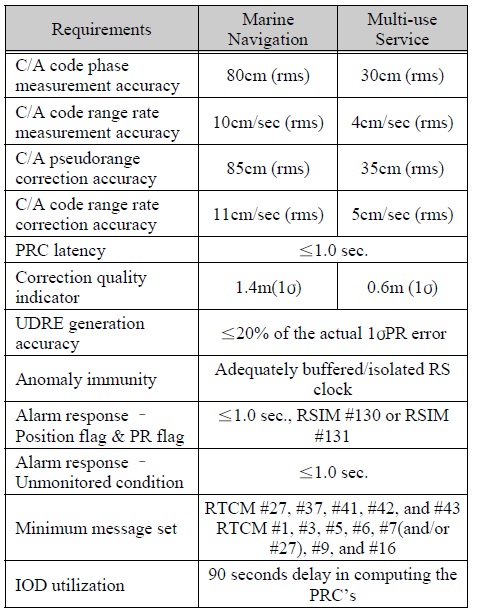
DGNSS 기준국(RS) 요구성능
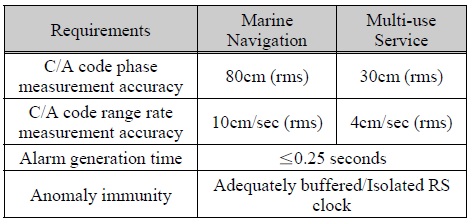
DGNSS 감시국(IM) 요구성능
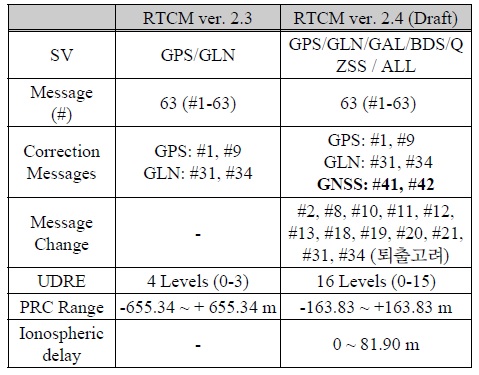
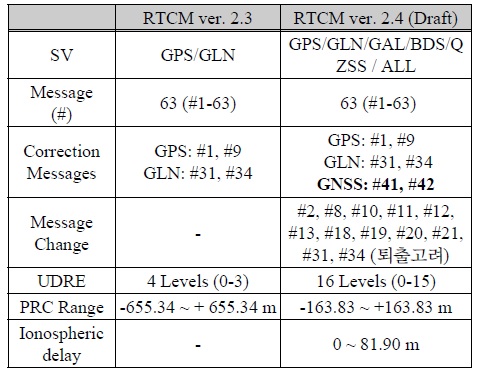
DGPS 기준국의 RTCM 보정정보 방송을 위한 현재 표준은 RTCM 2.3버전[2]이다. RTCM 2.3버전은 GPS(#1, #9)와 GLONASS(#31, #34) 보정정보를 방송하며, 총 63개의 메시지와 0-3의 4단계 UDRE 정보 제공, 보정정보의 범위는 -655.34 ~ + 655.34미터이다. GNSS 다원화에 대비하여 RTCM에서 준비중인 신규 RTCM 2.4 표준은 GPS, GLONASS, Galileo, BeiDou, QZSS 위성신호에 대한 보정정보를 #41, #42 메시지를 이용하여 제공한다.
UDRE 레벨은 16단계로 구분하여 제공하며, 보정정보 범위는 -163.83 ~ +163.83미터, 그리고 이온층 지연값을 제공한다. 표 3은 RTCM 2.3 버전과 신규 RTCM 2.4 버전을 비교하여 정리한 것이다.
[표 3.] DGNSS 서비스를 위한 RTCM 2.4 버전
DGNSS 서비스를 위한 RTCM 2.4 버전
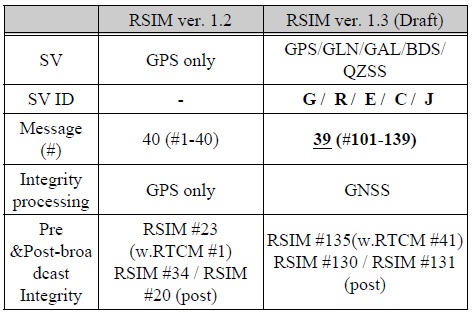
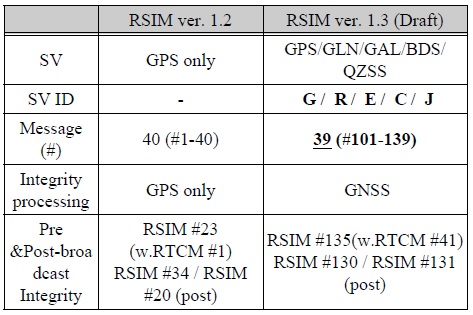
현재 RTCM에서 신규 표준으로 논의 중인 DGNSS 운영을 위한 RSIM 버전 1.3[1]을 기존 RSIM 버전 1.2[2]와 비교 분석하면 표 4와 같다. 가용한 위성의 경우 RSIM 1.2버전은 GPS만 가용하지만, RSIM 1.3 버전에서는 GPS, GLN(Glonass), GAL(Galileo), BDS (BeiDou), QZSS가 가용하다. 메시지 수는 총 40개에서 RSIM 1.3 버전에서는 39개로 1개가 줄었으며, RSIM 1.2버전에서는 무결성 처리 역시 GPS만 가능했으나, RSIM 1.3 버전에서는 각각의 GNSS별 무결성 처리가 가능하도록 준비하고 있다.
[표 4.] DGNSS 운영을 위한 RSIM 1.3버전
DGNSS 운영을 위한 RSIM 1.3버전
BeiDou 보정 서비스를 위해서는 우선 BeiDou 의사거리 보정정보를 생성하고, 신규 RSIM 버전 1.3 표준에 맞게 세부 메시지 내용을 구성해야 한다. BeiDou 위성의 경우 RSIM 메시지 내의 위성 ID는 ‘C’이며 무결성 감시를 위해 기준국(RS)에서 RTCM #41번 메시지를 RSIM #135번에 실어 감시국(IM)으로 전송하면, 감시국(IM)은 무결성 검사를 수행하여 그 수행결과를 RSIM #130 혹은 RSIM #131(Post mode)번 메시지를 이용하여 기준국(RS)으로 피드백 한다.
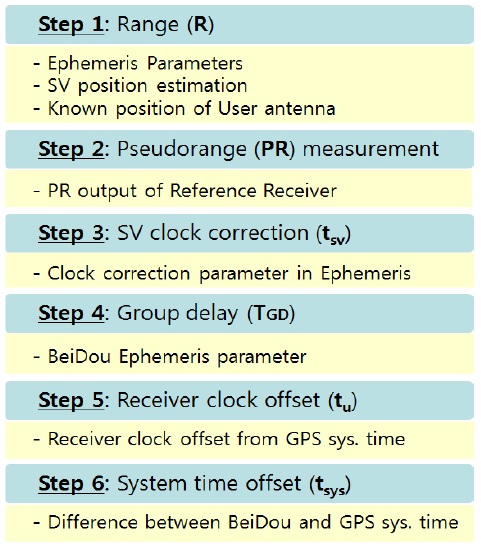
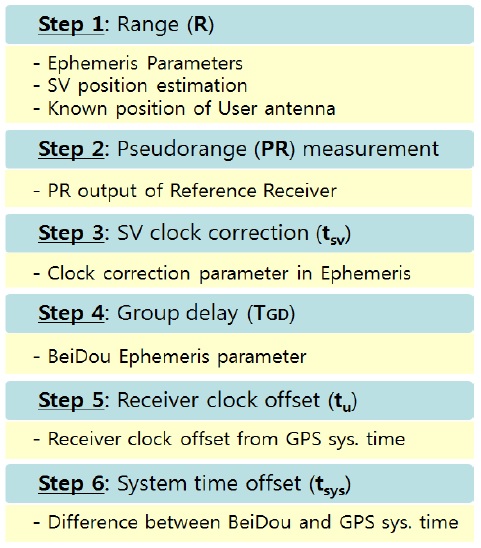
BeiDou 의사거리 보정정보를 계산하기 위한 방법은 기존 GPS, GLONASS, Galileo 의사거리 보정정보를 계산하는 방법[5]과 유사하다. BeiDou 보정정보 생성을 위해서는 먼저 BeiDou ICD 문서[6]를 기반으로 BeiDou 신호를 지원하는 수신기에서 제공하는 원시계측정보(Raw measurement)를 해석할 수 있어야 한다. 본 논문에서는 수신기에서 제공하는 BINEX 포맷[4]출력 정보를 해석하여 BeiDou 위성 궤도력 정보와 계측정보를 이용하였다. BeiDou 보정정보 생성을 위한 절차를 단계적으로 정리하면 그림 2와 같다. Step 1에서는 GNSS 수신기에서 제공하는 궤도력(Ephemeris) 파라미터를 이용하여 BeiDou 위성위치를 계산하고, 이미 알고 있는 사용자 안테나 위치와의 거리(R)를 계산한다.
Step 2에서는 GNSS 수신기의 BeiDou 위성별 의사거리 (PR) 계측 정보의 출력을 이용한다. Step 3에서는 Ephemeris의 시각 보정 파라미터를 기반으로 식 (1)의 위성시각 보정치(

또한 상대 보정 시각(

여기에서,
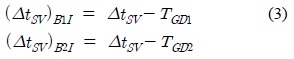
Step 4에서는 Ephemeris의 그룹지연(
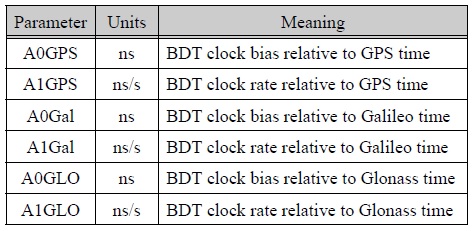
Step 5에서는 수신기 시계 오차(

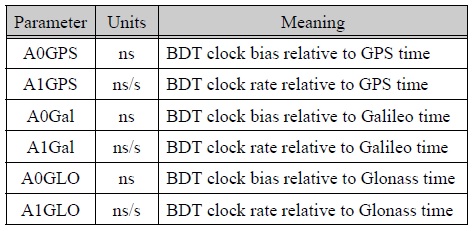
BeiDou 클럭 바이어스 파라미터
마지막으로 BeiDou 의사거리 보정정보(

여기에서 R은 위성과 사용자 안테나까지의 거리, PR은 수신기가 계측한 의사거리,
수신기 시계오차(
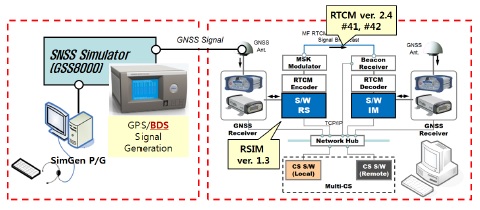
GPS/BeiDou 의사거리 보정정보 생성 및 성능 검증을 위하여, GNSS 시뮬레이션 환경을 구축하고, 기 개발된 DGNSS RSIM 성능검증 플랫폼에서 실험을 실시하였다. 그림 3은 GPS/BeiDou 의사거리 보정정보 생성 및 성능검증을 위한 시뮬레이션 실험 구성도를 나타낸다.
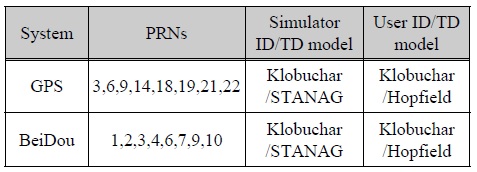
본 실험에서 적용한 위성 시나리오와 이온층/대류층 지연 모델은 표 6에 나타내었다. GPS, BeiDou 각각 8개의 위성을 이용하였고, 이온층 모델은 Klobuchar, 대류층 모델은 STANAG를 적용하여 시뮬레이션을 수행하였다.
[표 6.] GPS/BeiDou PRN과 ID/TD 모델
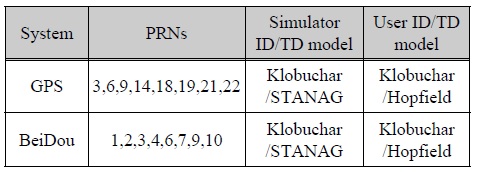
GPS/BeiDou PRN과 ID/TD 모델
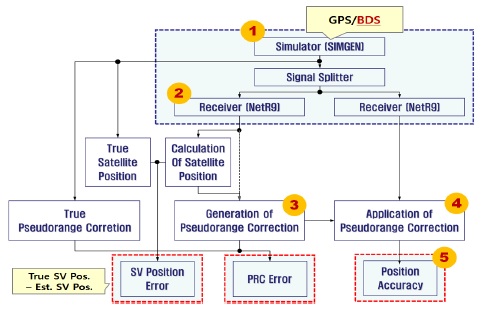
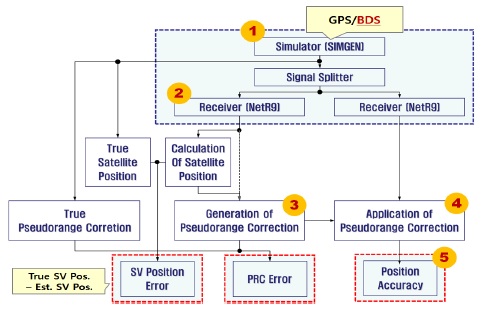
그림 4는 BeiDou 보정정보 생성 알고리즘의 성능검증을 위한 절차를 나타낸다. GNSS 시뮬레이터의 신호출력을 신호분배기를 통해 두 대의 수신기에 각각 입력하고, 시뮬레이터의 PRC와 수신기 출력을 기반으로 계산한 PRC의 차이를 분석한다. 또한 추정 PRC를 다른 수신기의 의사거리 측정치에 반영하여 측위정확도를 각각 비교하였다.
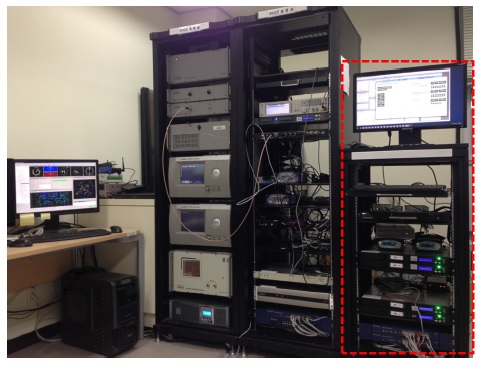
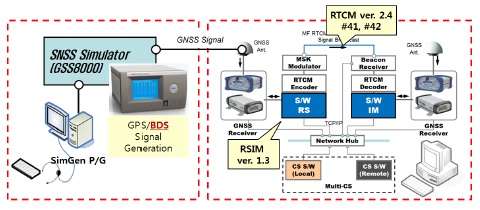
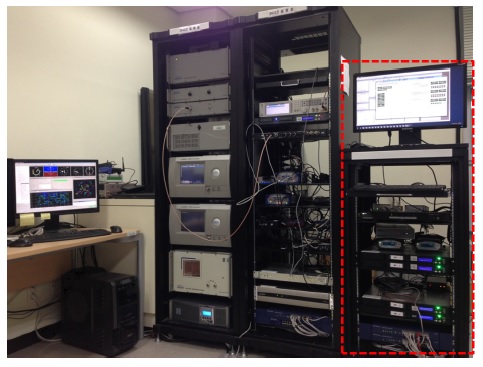
본 실험을 위한 BeiDou 의사거리 보정 성능검증 플랫폼 구성은 그림 5와 같다. Spirent 사의 GSS8000 시뮬레이터와 신호 조합기, Trimble NetR9 수신기 2대, 그리고 개발한 BeiDou 보정정보 생성 알고리즘이 적용된 RSIM 소프트웨어 탑재 PC로 구성하였다.
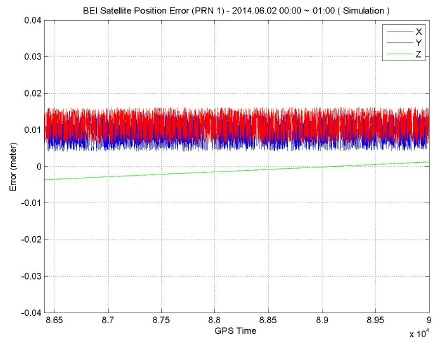
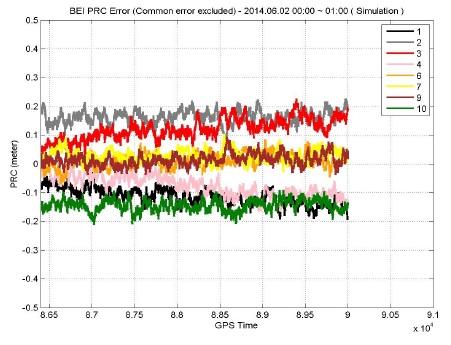
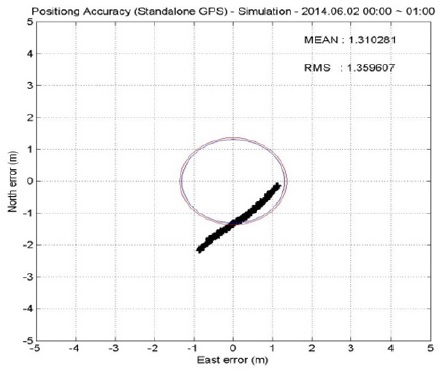
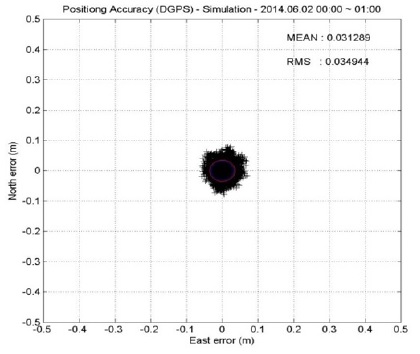
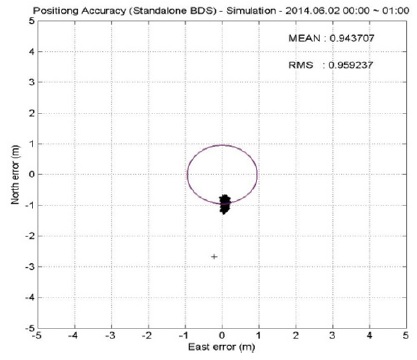
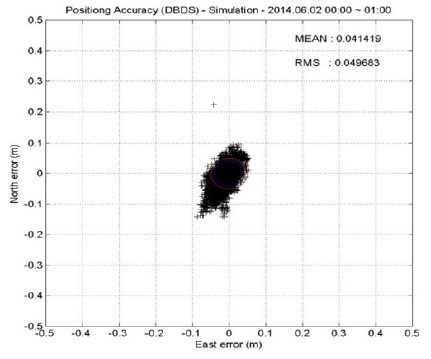
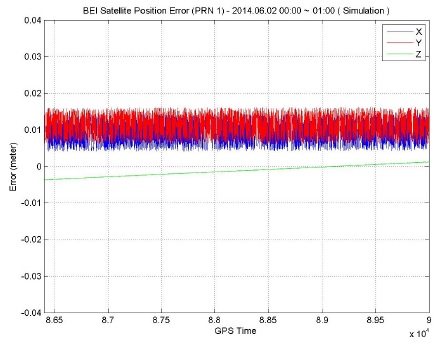
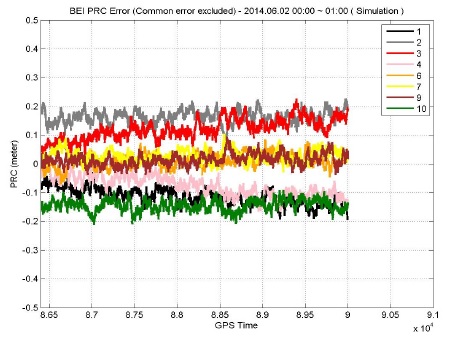
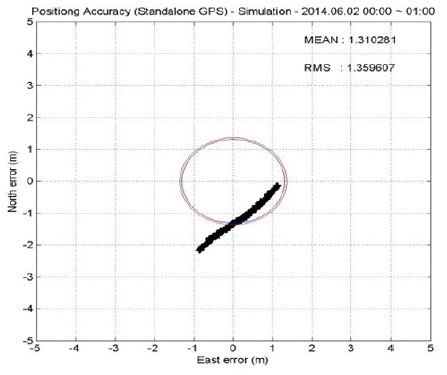
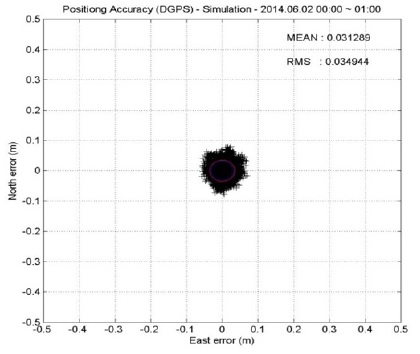
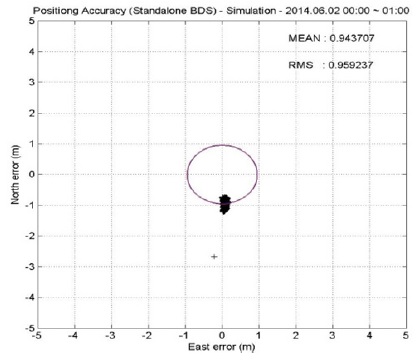
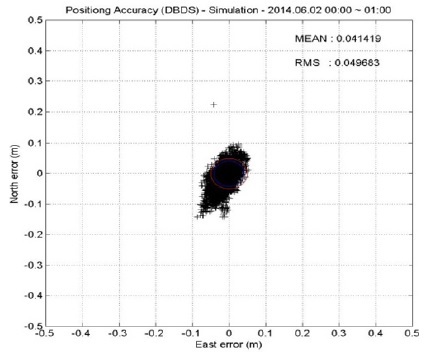
본 실험에서는 BeiDou 보정정보 생성 알고리즘의 성능검증을 위해, 먼저 시뮬레이터의 위성위치와 추정 위성위치, 의사거리 보정정보(PRC)와 비교한 결과는 그림 6, 그림 7에 각각 나타내었다. 또한 측위성능 결과 검증하기 위해 생성된 PRC를 적용한 결과를 비교하여 그림 8, 그림 9, 그림 10, 그림 11에 각각 나타내었다.
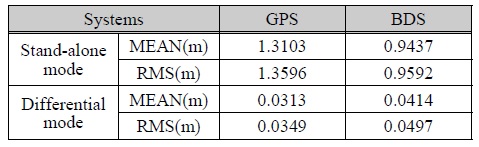
본 논문에서 실시한 실험결과를 측위정확도 측면에서 정리하면 표 7과 같다. GPS, BeiDou 단독항법(Stand-alone)일 경우에는 1.359m, 0.959m를 각각 나타내었고, 보정항법(Differential)의 경우, DGPS, DBeiDou 측위 결과는 0.034m, 0.049m의 측위정확도를 보였다.
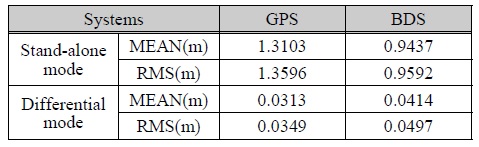
시뮬레이션 결과 정리
본 실험결과는 GNSS 시뮬레이터를 이용한 결과이며, 실제 필드 환경에서의 측위성능 결과는 이보다 더 큰 측위오차를 가질 것이다. 하지만 본 논문에서 제안한 DGNSS RSIM을 위한 BeiDou 의사거리 보정 기법이 국제기구인 RTCM에서 요구하는 RSIM 성능표준(85cm 이내)을 충분히 만족시킬 수 있음을 확인할 수 있었으며, 이는 향후 DGNSS RSIM 재구축시 적용 및 활용이 가능할 것이다.
본 논문에서는 DGNSS 기준국 운영 및 보정 서비스를 고도화하고, 신규 RSIM 표준과 RTCM 표준에 대응하기 위한 BeiDou 의사거리 보정정보 생성 기법 및 그 성능평가에 대해 다루었다. 구체적으로 기존 DGNSS 기준국 아키텍처와 RTCM의 기준국 운영을 위한 RSIM 메시지 표준과 성능요구조건, RTCM 방송 표준을 비교분석하였고, BeiDou 보정정보 생성 알고리즘을 제시하였다. 또한 GPS/BeiDou 시뮬레이터를 이용하여 GPS 보정 성능결과와 BeiDou 보정성능 결과를 비교하였다. 성능평가 결과 해양 분야에 활용하기 위한 측위정확도 측면에서 RSIM의 기준국 요구 성능인 85cm이내의 성능을 충족함을 확인 할 수 있었다. 향후 본 연구의 결과인 BeiDou 보정정보 생성 기법은 BeiDou 위성의 FOC (Full Operational Capability)에 대비하여, 신규 DGNSS RSIM 개발 및 운영에 충분히 활용 가능함을 제시하기 위해, 실제 DGNSS 기준국에서의 시범 운영을 통한 RSIM의 요구 성능 검증이 수반되어야 할 것이다.