In cognitive radio technology, the overall capacity of communications systems can be improved without allocating additional bands by allowing secondary system to utilize the band when a primary system who has right to use the band does not utilize it. Therefore, spectrum sensing to determine the existence of primary system is utmost important in the cognitive radio technology. In this work, we consider a novel cooperative spectrum sensing in cognitive cellular systems. Especially, we consider the case in which heterogeneous primary systems coexist, i.e., heterogenous transmission power and sensing requirement of primary system, such that only portion of users in cognitive cellular systems are able to detect the primary system. In this case, we propose new cooperative spectrum sensing with multiple sensing stages to properly detect the existence of primary systems in this kind of situations. Moreover, we analyze the performance of conventional cooperative spectrum sensing schemes such as OR-rule, AND-rule and MAJORITY-rule under the existence of heterogeneous primary systems. Finally, we investigate the performance of the proposed scheme through computer based simulations and show that the existence of primary systems can be determined accurately by using our proposed scheme.
최근 스마트 폰 및 태블릿 피시의 광범위한 보급으로 인해 이동 통신 시스템의 모바일 트래픽 양이 기하급수적으로 증가하였다[1,2]. 특히 Cisco 사의 Visual Networking Index에서 확인할 수 있듯이 모바일 트래픽 양이 10년 내에 현재의 10배 이상으로 증가할 것으로 예측되므로 이러한 모바일 트래픽 증가를 해결하기 위한 방안이 필요하다[1]. 당면한 모바일 트래픽 증가에 효율적으로 대처하기 위해 이동 통신 시스템의 수율을 증가시키기 위한 다양한 기술들 (MIMO (Multiple Input Multiple Output) 및 D2D (Device- to-Device))에 대한 연구가 활발하게 이루어지고 있다[2].
모바일 이동통신 시스템의 수율 향상에 있어서 가장 큰 걸림돌은 사용 주파수 확대 없이 수율을 확대하는 것이 어렵다는 것이다. 하지만 사물 인터넷 기술등의 부상으로 인해 무선 통신이 우리 생활 곳곳에서 많이 사용됨에 따라 사용 가능한 주파수 대역이 거의 고갈되었고, 따라서 추가적으로 주파수를 할당하는 것은 현실적으로 매우 힘들다. 인지 라디오 (Cognitive Radio) 기술에서는 일차 시스템에 할당된 대역에 대해 일차 시스템이 사용하지 않을 때 대역사용에 우선권이 없는 이차 시스템이 기회적으로 (Opportunistic) 사용하게 사용함으로써 이차 시스템에 대한 추가적인 대역 할당 없이 수율을 향상시킬 수 있다[3]. 실제 측정 결과에서 볼 수 있듯이 [3] 실제 많은 일차 시스템들이 할당받은 대역을 대부분의 시간에서 사용하지 않고 있으므로, 인지 라디오 기술을 사용하여 추가적인 대역 할당 없이 통신 시스템의 효율을 높일 수 있을 것이다.
인지 라디오 기술에서는 대역에 사용 권한이 없는 이차 시스템이 우선권을 가지는 일차 시스템의 대역을 기회 적으로 사용하는 것이므로 일차 시스템의 통신이 이차 시스템에 의해서 방해 받지 않아야 한다[4-9]. 이를 위해서 이차 시스템이 대역 센싱을 통해서 일차 시스템 유무(일차 시스템이 대역을 사용하고 있는지 사용하고 있지 않은지)를 판단하고 일차 시스템이 없을 경우에만 대역을 사용하게 함으로써 일차 시스템의 동작을 원치않는 간섭으로 부터 보호한다. 따라서 인지 라디오에서 정확한 대역 센싱은 매우 중요하고, 이와 관련한 많은 연구가 진행되어 왔다[4-9]. 특히 통신 채널의 페이딩 및 노이즈[10]가 대역 센싱에 미치는 영향을 줄이기 위해서 다수의 단말이 동시에 대역을 관찰하는 협력 센싱에 대한 연구가 많이 이루어 졌다[4,5]. 협력 센싱에서 는 다수의 단말이 동시에 대역 센싱을 수행하고 (개별 센싱) 이 센싱 결과를 종합하여 최종 일차 사용자 유무를 판단한다.
협력 센싱과 관련한 많은 연구들이 이루어 졌지만 기존 연구들에서는 협력 센싱에 참여하는 단말 모두가 일차 시스템을 발견할 수 있다고 가정하였다1). 하지만 실제 인지 라디오 환경에서는 다양한 이종 일차 시스템이 존재할 수 있고, 이 때 각 일차 시스템들은 다른 센싱 요구 조건 및 전송 파워를 가질 수 있으므로, 전체가 아닌 일부의 이차 사용자들만 일차 시스템 유무를 판단할 수 있는 위치에 있을 수 있다. 이 경우 기존의 연구들은 그대로 적용하기 어려울 것이다[4]. 따라서 이종 일차 시스템을 고려한 협력 센싱 방안의 연구가 필요하다. 본 연구에서는 이종 일차 시스템이 존재하는 인지 라디오 환경에서 협력 센싱의 성능을 분석하고 협력 센싱의 요구조건에 따라서 적응적으로 센싱을 조절하는 새로운 협력 센싱 방안을 제안하였다.
본 논문의 II장에서는 이종 일차 시스템 환경에서 협력 센싱의 대표적인 방안들인 OR-rule, AND-rule 및 MAJORITY-rule의 성능을 분석하고 이종 일차 시스템을 고려한 새로운 Improved-OR-rule을 제안한다. III장에서는 시뮬레이션을 통해서 기존 협력 센싱 방안과 제안 방안의 성능을 분석하고 본 연구의 분석 결과가 시뮬레이션 결과와 일치함을 보인다, 마지막으로 IV장에서 본 논문을 마무리 한다.
1)즉 개별 단말들이 일차 시스템을 발견하지 못하는 것은 센싱 에러 때문이라고 가정하였다.
Ⅱ. 이종 일차 시스템 환경에서의 협력 센싱 성능 분석 및 제안 방안
인지 라디오 기술의 대역 센싱에서는 시변하는 채널 환경 및 노이즈의 영향으로 인해서 잘못된 센싱 결과가 나올 수 있다[6]. 이러한 부정확한 센싱에는 2가지 가능성이 존재한다. 즉 일차 시스템이 없을 때 일차 시스템이 존재한다고 판단하는 False Alarm과 일차 시스템의 존재를 놓치는 Miss Detection이 발생할 수 있다. 대역 센싱 에러를 줄이기 위해서 협력 대역 센싱을 사용한다. 협력 대역 센싱에서는 단일 단말들이 개별적으로 대역 센싱을 수행하고 각 단일 센싱 결과들을 총합하여 최종 센싱 결과를 도출함으로써 노이즈 및 채널의 영향을 줄이고 센싱의 정확도를 높일 수 있다[4,5].
협력 대역 센싱에서는 단일 단말들의 최종 센싱 결과(일차 시스템의 존재 여부)를 총합하여 결과를 도출하는 Hard Decision과 단일 단말들의 센싱 값들 (예를 들어서 측정된 신호 크기) 과 같은 정보를 이용해서 결과를 도출하는 Soft Decision이 있다. Soft Decision의 경우 센싱의 정확도를 높일 수 있지만 시그널링 오버헤드가 단말 수에 비례하여 급격하게 증가하는 문제가 있다. 따라서 본 연구에서는 Hard Decision 기반의 센싱에 초점을 맞추도록 한다.
Hard Decision 기반 협력 센싱의 대표적인 방식으로 OR-rule, AND-rule 및 MAJORITY-rule이 있다[4,5]. OR-rule에서는 단말 들 중 하나라도 일차 시스템이 존재 한다고 알리면 대역에 일차 시스템이 있다고 결론을 내린다. 따라서 OR-rule 에서는 Detection 확률을 극대화 할 수 있지만 전체적인 False Alarm이 증가하는 문제가 발생한다. AND-rule에서는 모든 단말 들이 일차 시스템의 존재를 알려야지만 일차 시스템이 존재한다고 결론을 내는 방식이다. OR-rule과 다르게 False Alarm을 줄일 수 있지만 Detection 확률이 감소하는 문제가 있다. 마지막으로 MAJORITY-rule에서는 절반 이상의 단말들이 일차 시스템의 존재를 나타내야만 일차 시스템이 존재한다고 결론을 내린다. 앞서 설명한 두 방식에 비해 False Alarm과 Detection 확률의 균형을 맞추어 어느 한 값이 극단적으로 커지는 것을 막을 수 있다.
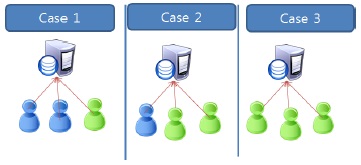
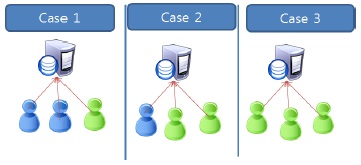
그림 1을 통해서 각 협력 센싱 방식의 차이를 살펴볼 수 있다. 그림 1에서 파란 단말은 일차 시스템이 없다고 리포팅한 단말이고 녹색 단말은 일차 시스템이 있다고 리포팅한 단말이다. Case 1에서는 OR-rule만 일차 시스템이 있다고 결론을 내릴 것이고 Case 2에서는 OR-rule 과 MAJORITY-rule이, Case 3에서는 모든 방식이 일차 시스템이 존재한다고 결론을 내릴 것이다.
2.2. 이종 일차 시스템을 고려한 협력 대역 센싱 성능
앞서 살펴본 협력 대역 센싱 방식들의 성능 분석에 대한 많은 연구들이 진행되어 왔다. 하지만 기존의 연구들은 모든 단말들이 일차 시스템을 탐지할 수 있는 위치에 있다고 가정을 하였다. 하지만 실제 다양한 일차 시스템이 공존하는 환경에서는 다른 전송 파워를 가진 일차 시스템이 공존할 수 있고 각 일차 시스템들이 다른 센싱 requirement를 가질 수 있으므로 전체 단말들 중 일부 단말들만 일차 시스템을 발견할 수 있을 수도 있다2). 실제 [4]에서 볼 수 있듯이 일차 시스템의 전송 파워에 따라서 이차 시스템의 일부 단말들만 일차 시스템의 No-Talk Zone3)에 위치할 수 있다. 하지만 셀룰러 이동통신 시스템의 경우 일부의 단말들만 일차 시스템의 No-Talk Zone 에 들어 있다고 하더라도 대역을 사용하면 안 된다[6]. 기존의 협력 센싱 연구에서는 이러한 이종 일차 시스템 환경을 고려하지 않았으므로 분석 결과와 실제 인지 라디오 환경에서의 결과가 잘 맞지 않을 것이고 제대로 동작하지 않을 것이다.
본 연구에서는 우선 이종 일차 시스템이 존재하여 일부의 단말만 일차 시스템의 No-Talk Zone에 들어있는 환경에서 기존 협력 센싱 방식들의 성능을 분석하였다. 분석에서는 협력 센싱 방안들의 최종 Detection Probability (여기서는 각 센싱 방안에 따라
본 논문의 분석에서는 전체 단말의 수가 M이라 가정하였고 각 단말의 센싱에서 Detection, False Alarm을 나타낼 확률이 각각
우선 OR-rule에서는 전체 단말들 중 하나의 단말이라도 일차 시스템이 존재한다고 알리면 최종적으로 일차 시스템이 존재한다고 결론을 내리기 때문에 OR-rule의 False Alarm 확률 (


앞의 수식에서 볼 수 있듯이 False Alarm 확률은 기존의 분석과 달라지지 않지만 Detection 확률이 달라지는 것을 확인할 수 있다. OR-rule에서는 일차 시스템의 No-Talk-Zone에 속한 단말들이 하나라도 Miss Detection을 발생하지 않고 No-Talk Zone에 속하지 않는 단말들 중 하나라도 False Alarm을 발생하지 않을 경우에 Detection이 일어나게 된다. 따라서 이를 통해서 (2)의 식을 유도할 수 있다.
다음으로 AND-rule에서는 모든 단말이 일차 시스템이 존재한다고 알리는 경우에만 일차 시스템이 존재한다고 결론을 내리기 때문에 AND-rule의 False Alarm 확률 (


OR-rule에서와 동일하게 False Alarm 확률은 기존의 분석과 달라지지 않지만 Detection 확률이 달라지는 것을 확인할 수 있다. AND-rule에서는 일차 시스템의 No-Talk-Zone에 속한 단말들 모두 Miss Detection을 발생하지 않고 No-Talk Zone에 속하지 않는 단말들 모두 False Alarm을 발생한 경우에 Detection이 일어나게 된다. 따라서 이를 통해서 (4)의 식을 유도할 수 있다.
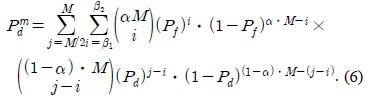
마지막으로 MAJORITY-rule에서는 과반수의 단말이 일차 시스템이 존재한다고 알리는 경우에만 시스템이 일차 시스템이 존재한다고 결론을 내리기 때문에 MAJORITY-rule의 False Alarm 확률 (

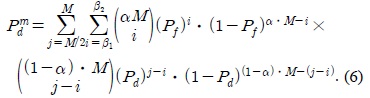
(6)의 식에서


앞에서와 동일하게 False Alarm 확률은 기존의 분석과 동일하고 Detection 확률이 달라지는 것을 볼 수 있다. MAJORITY-rule에서는 일차 시스템의 No-Talk-Zone에 속한 단말들 중
2.3. 이종 일차 시스템을 고려한 협력 대역 센싱 방안
본 절에서는 이종 일차 시스템을 고려한 새로운 협력 대역 센싱 방안을 제안한다. 제안하는 방안은 OR-rule을 기반으로 한다4). 기존의 OR-rule은 단말의 수가 증가할수록 False Alarm 확률이 기하급수로 증가하는 문제가 있다. 이를 해결하기 위해서 제안 방안에서는 다중 스테이지로 대역 센싱을 수행한다. 즉 특정 단말들이 개별 대역 센싱을 통해서 일차 시스템을 발견하였을 때 바로 일차 시스템 존재 여부를 정하는 것이 아니라 발견한 단말들에게 N-1번 대역 센싱을 더 수행하게 하여 모든 센싱에서 일차 시스템이 감지되었을 경우에만 일차 시스템이 존재한다고 판단한다. 제안 방안을 통해 False Alarm으로 센싱 결과를 잘 못 도출한 단말도 다음 센싱 기회가 주어지기 때문에 이전의 센싱 에러를 바로 잡을 수 있고 이를 통해서 전체적인 False Alarm 확률을 줄일 수 있다.
앞의 분석과 마찬가지로 제안 방안의 False Alarm 확률 (


기존 방안들과 달리 제안 방안에서는 센싱 스테이지 수 N을 조절하면서 False Alarm 과 Detection 확률을 조절할 수 있다. 이를 위해서 아래와 같은 최적화 문제를 만들어서 최적의 스테이지 수 N*을 구할 수 있다.

(11)의 최적화 문제에서는 일차 시스템 Detection 확률을 미리 정해진 Threshold인 Pdthr 이상이 되게 하면서 False Alarm 확률을 최소화 하는 것을 목표로 한다.
2)이 경우에는 일차 시스템의 감지 지역에 들어있지 않는 단말들은 여러 번 센싱을 하여도 일차 시스템 존재를 파악하지 못할 것이다. 3)인지 라디오 시스템에서는 일차 시스템의 No-Talk Zone에 있는 이차 시스템의 단말들이 일차 시스템의 존재를 인지할 수 있다. 4)OR-rule을 사용한 것은 OR-rule이 다른 방식들에 비해서 더 정확한 일차 시스템 탐색 결과를 주기 때문이다.
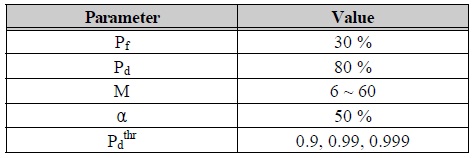
본 연구에서는 II장에서 제안된 다양한 협력 센싱 방안의 성능을 비교하였다. 성능 분석에서 사용된 시뮬레이션 파라미터는 아래의 표 1과 같다.
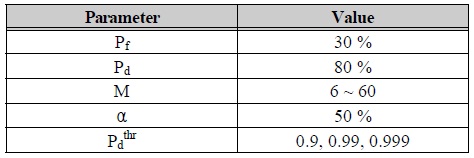
시뮬레이션 파라미터
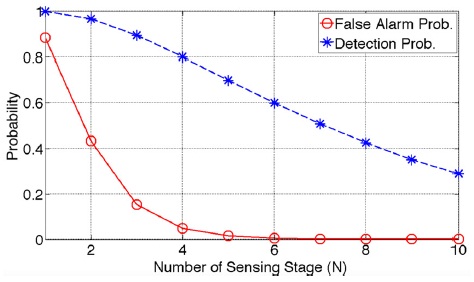
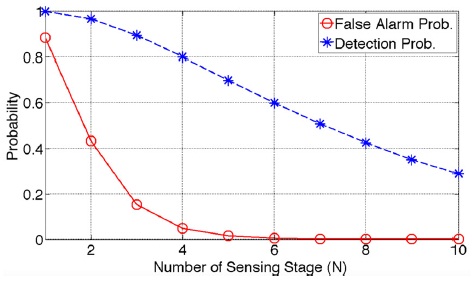
우선 그림 2에서는 센싱 스테이지에 따른 False Alarm 확률과 Detection 확률을 구하였다. 그림 2에서 볼 수 있듯이 False Alarm 과 Detection 확률 모두 N이 증가함에 따라서 감소하는 것을 확인할 수 있다. 즉 센싱 스테이지 수를 증가시키면 False Alarm을 줄일 수 있지만 동시에 Detection에 오류가 많이 발생하게 됨을 확인할 수 있다.
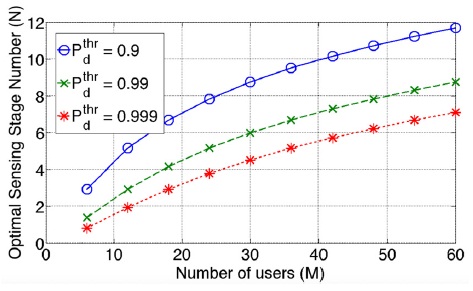
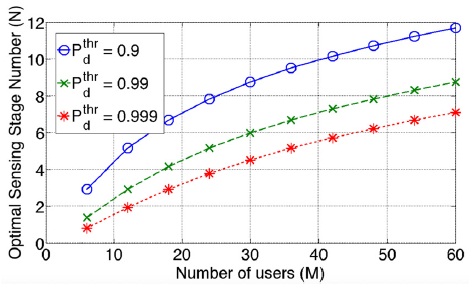
다음으로 그림 3에서는 최적화 문제 (11)을 이용해서 구해지는 최적 센싱 스테이지의 수를 계산하였다. 만약 센싱 성능이 좋아지더라도 N이 증가하면 시스템 수율이 감소할 수 있기 때문에5) 최적 N값의 분석이 필요하다. 그림 3에서 확인할 수 있듯이 단말의 수가 증가할수록 최적 센싱 스테이지 수가 증가하는 것을 볼 수 있다. 이는 단말 수가 증가하면 일차 시스템을 더 쉽게 발견 할 수 있게 되므로 False Alarm을 줄이기 위해서 센싱 스테이지 수를 늘리기 때문이다. 또한 Pdthr 가 증가하면서 필요한 센싱 스테이지 수가 줄어드는 것을 볼 수 있는데 이는 목표 Detection 확률 때문에 센싱 스테이지 수의 증가가 한정되기 때문이다.
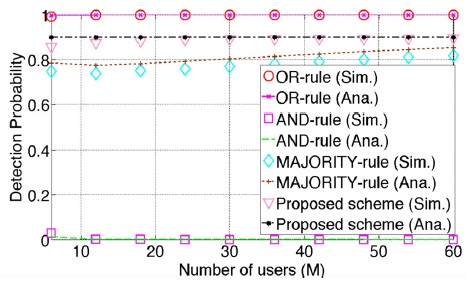
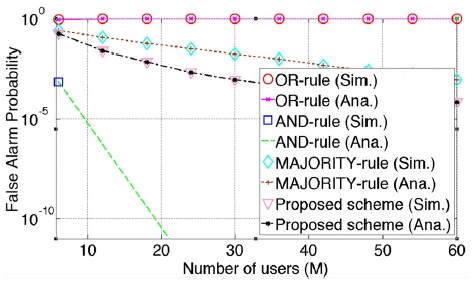
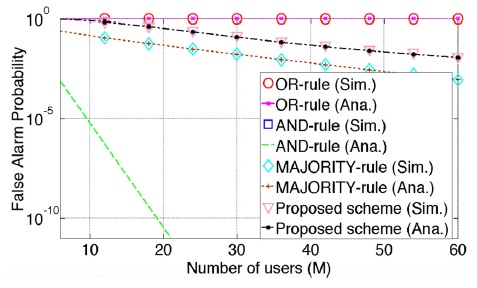
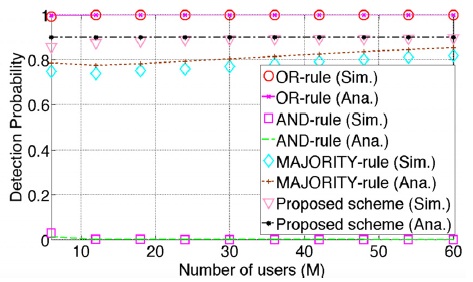
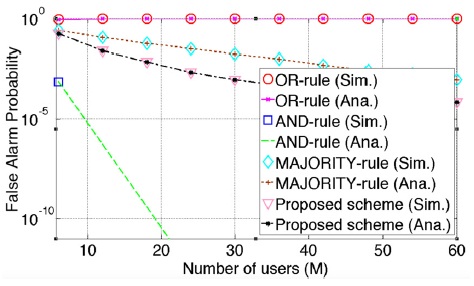
이종 일차 시스템이 존재하는 환경에서의 협력 대역 센싱의 정확도를 확인하기 위해서 Pdthr = 0.9일 때 이차 시스템의 단말 수에 따른 Detection 확률과 False Alarm 확률을 그림 4와 그림 5에 나타냈다. 본 성능 분석에서는 시뮬레이션을 통해서 얻어진 값과 분석을 통해서 얻어진 값을 모두 표기하였다.
우선 그림 4의 결과에서 볼 수 있듯이 본 연구에서 도출한 분석과 실제 시뮬레이션 값이 일치함을 확인 할 수 있고 이를 통해서 우리의 분석이 정확함을 검증 할 수 있다. 또한 본 연구에서 고려된 4가지 협력 대역 센싱 방안 중 OR-rule 방식이 제일 높은 Detection 확률을 보이는 것을 볼 수 있었다. 하지만 그림 5에서 볼 수 있듯이 OR-rule은 너무 높은 False Alarm 확률을 가지게 되므로 전체적인 이차 시스템 성능이 저하될 수 있다. 또한 AND-rule 방식도 매우 낮은 False Alarm 확률을 보이지만 Detection 확률이 거의 0이 근접함을 볼 수 있다.
그림 4와 그림 5에서 볼 수 있듯이 Majority 방식과 제안 방안이 실제 이차 시스템에 적합한 Detection 확률 및 False Alarm 확률을 보이는 것을 확인할 수 있다. 특히 제안 방안의 경우 Detection 확률이 Pdthr 의 값 (0.9) 과 동일한 것을 볼 수 있는데 이는 제안 방안에서 (11)을 이용하여 센싱 스테이지의 수를 Pdthr 에 맞추어 조절하기 때문이다. 또한 제안 방안이 MAJORITY-rule 방식에 비해서 낮은 False alarm 확률을 갖는 것을 확인할 수 있고 이를 통해서 제안 방안의 성능이 제일 좋을 것을 확인할 수 있다. 특히 제안 방안의 경우 OR-rule에 기반을 두었지만 OR-rule에 비해서 훨씬 좋은 성능을 보이는 것을 확인할 수 있다.
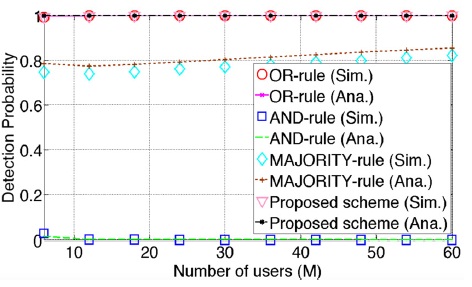
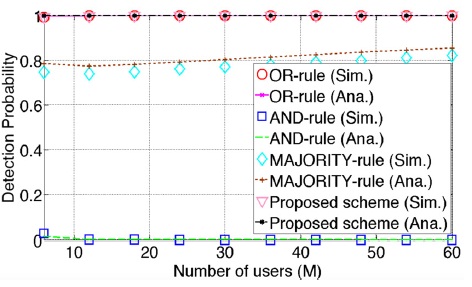
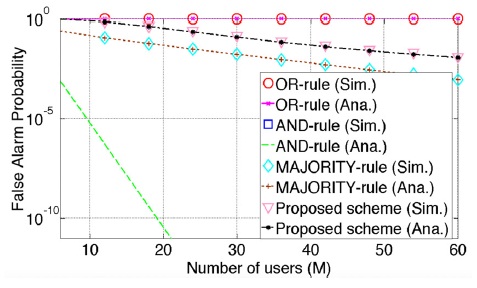
다음으로 Pdthr 값 변화에 따른 대역 센싱 정확도를 확인하기 위해 Pdthr = 0.999일 때 이차 시스템의 단말수에 따른 Detection 확률과 False Alarm 확률을 그림 6과 그림 7에 나타냈다. 앞의 그림 4와 그림 5의 결과와 거의 동일하지만 제안 방안의 경우 더 높은 False Alarm 확률을 보이는 것을 확인할 수 있다. 이는 이전 시뮬레이션 보다 더 높은 Pdthr 를 만족시키기 위해서 제안 방안의 센싱 스테이지 수가 감소하였기 때문이다. MAJORITY- rule의 경우 제안 방안에 비해서 낮은 False Alarm 확률을 보이지만 Detection 확률이 Pdthr 보다 낮은 것을 확인할 수 있다. 즉 제안 방안의 사용을 통해서 시스템 환경에 적응적으로 원하는 대역 센싱 정확도를 달성하면서 False Alarm 확률을 최소화 하는 것을 확인할 수 있다.
5)인지 라디오에서는 정확한 센싱을 위해서 센싱 period시에 데이터 전송을 하지 않는다(Quiet Period). 따라서 긴 시간 센싱을 하면 수율 감소가 발생한다 [6].
본 연구에서는 인지 라디오 시스템에서 협력 대역 센싱 방안들에 대해서 살펴보았다. 특히 전체 단말들 중 일부 단말들만 일차 시스템을 찾을 수 있는 이종 일차 시스템 환경을 고려하여 다양한 협력 대역 센싱 방안들의 성능을 분석하였고, 또한 목표 Detection 확률에 따라서 센싱 스테이지 수를 적응적으로 조절하는 OR-rule 에 기반을 둔 새로운 협력 대역 센싱 방안을 제안하였다. 시뮬레이션을 통해서 이종 일차 시스템 환경에서 협력 대역 센싱 방안들의 성능을 확인하였고, 제안 방안의 사용을 통해 대역 센싱의 목표 Detection 확률을 달성하면서 동시에 False Alarm 확률을 최소화 할 수 있음을 확인하였다. 본 연구에서는 단말들의 센싱 성능이 동일한 환경을 고려하였으나 추후에는 각 단말들의 센싱 성능이 다른 환경을 고려한 최적 대역 센싱 방안에 대해서 연구를 진행할 계획이다.