Recently, for the purpose of preventing the corrosion of a vessel, the electrical corrosion protection device that prevents the corrosions of the hull and the propeller is widely used. However, the electrical corrosion protection method artificially emits the current into the seawater around the hull using the power supply in order to make the hull and propeller be in the state of not being corrosion, so that electromagnetic field is generated outside the hull by the current emitted into the seawater. In this paper, the static and alternating constituents of the electromagnetic field generated in underwater outside the hull are analyzed and a countermeasure is investigated to reduce the strength of the electromagnetic field. In conventional shaft grounding system, the shaft potential is maintained above at least 100mV and the alternating current component constitutes more than 10% of the total current. However, in this paper, a control system was designed in order that the alternating current component and the shaft potential which generate electromagnetic field are maintained within 1% and 2mV respectively, and the performance was verified by simulation.
해상의 유일한 운송수단인 선박은 다양한 종류가 있으며, 이들은 각기 다른 다양한 항로와 운항 조건에서 운항되며, 모든 운송수단 중 대부분의 시간을 수중에 위치하여 염분이 포함된 바닷물에 노출되므로, 부식되기 쉽다. 선체의 부식을 방지하기 위한 방법으로는 일반적으로 선저 표면에 내부식성 도료를 도장하는 1차적인 방식 방법이 사용되고 있지만, 이러한 방법은 선박의 운항시 해수에 떠다니는 부유물 또는 수중 물체와의 충격으로 인하여 부분적인 도장 파손으로 인해 선체의 부식을 초래하게 된다[1]. 그리하여 최근에는 전기방식 방법이 많이 이용되고 있다. 일반적으로 선박의 선체는 선체보다 갈바닉 전위가 낮은 금속들을 인위적으로 부착하여 선체를 보호하는 희생양극식 부식방지장치와 비소모성 양극 및 기준 전극을 통해 선체 표면의 전위를 부식이 일어나지 않는 전위 조건으로 항상 유지시켜 주는 외부 전원식 부식방지장치가 사용되고 있다[2]. 이와 같이 외부전원식 부식방지장치는 선체의 부식을 방지하기 위하여 인위적으로 방식전류를 해수를 통해 선체에 흘려주게 되므로 수중 전자장 신호를 발생시키는 주요원인이 된다[3].
뿐만 아니라, 외부전원식 부식방지 장치를 운영하게 되는 경우, 위와 같이 일정한 직류형태의 방식전류가 선체-해수-프로펠러-축계 지지대-선체의 경로로 흐르게 되지만, 선박이 운행할 경우 프로펠러 회전으로 인하여 전류 경로 상의 임피던스 변화와 회전에 의한 유도 기전력으로 인하여 방식전류가 교류 성분을 포함하게 됨으로써 시변 전자장을 발생 시키게 된다. 이런 교류 전자장 신호는 수중으로 전파되어 전자장 센서가 탑재된 감응기뢰의 탐지원이 될 수 있기 때문에 선박의 안전에 있어서 큰 위협이 되고 있다[4].
본 논문에서는 먼저, 선체의 부식을 방지하기 위한전기적인 부식방지장치에 의해서 발생되는 수중 전자장에 대하여 집중적으로 분석한다. 그런 후, 선박운행에 따른 교류 전자장 발생에 대하여 논의하고, 이에 대한 대응책의 하나로써 능동 축 접지(ASG: Active Shaft Grounding) 시스템 설계에 관한 기술을 제안하기로 한다.
선박은 다양한 부식 환경에 노출되어 있으며, 그 중금속의 상대적인 전위차로 인한 이종금속 접촉부식이 큰 영향을 미친다. 따라서 이를 방지하기 위하여 현재 수동 음극 보호 방식과 외부에서 인위적으로 부식 환경을 방지해주는 외부 전원식 부식방지장치가 운용중에 있다[5]. 수동 음극 보호 방식은 설치 및 운용이 간단한 반면, 유지보수 및 성능 면에서는 좋지 못하다. 외부전원식 부식방지장치는 초기 설치 및 운용면에서 다소 가격적 부담과 전기적 제어장치가 포함되어야 하는 부담이 있지만, 부식방지 성능 측면에서는 상당히 우수하다 [6]. 하지만, 이 방식은 수중에 방사되는 전류로 인하여 수중 전자장을 발생시켜, 수중 탐지 체계의 의한 선박안전상의 위협을 초래하게 된다.
선박에서 발생되어 수중으로 방사되는 전자장 신호는 선체 내부에서 발생되는 신호와 외부에서 발생되는 신호로 크게 분류할 수 있다. 선체 내부에서 발생되는 신호는 대부분 지구자기장 하에서 강자성체인 선체에 의한 자기장 성분과 전기장 성분이며, 일부 선체 내부의 전력계통 선로에 의한 전기장, 자기장 성분이다. 선체 외부에서 발생되는 신호는 부식방지를 위한 방식전류가 해수에 직접 방사되면서 생기는 전자장 성분으로 서 선박의 운행시 프로펠러 회전에 의해 생성되는 교류신호에 의한 전자장 성분도 포함되어 있다[7].
선체 내부에서 발생되는 전자장 신호는 현재 가동중인 탈자와 소자 장비에 의해서 대부분이 제거될 수 있다. 하지만, 선체 외부에서 발생되는 전자장 신호는 탈자와 소자장비로 제거하기가 어렵다. 따라서 현재 대부분의 선박들에서는 슬립 링과 브러시를 통해 프로펠러 축과 선체간을 접지시킴으로써 프로펠러 축의 부식 및 교류 전자장 신호 발생을 억제하는 수동 축 접지(passive shaft grounding) 장치를 장착하여 운용 중에 있다[8]. 그러나, 슬립링 조립체와 브러시는 주기적인 정비가 필요하고 성능이 떨어진 상태에서는 국부적인 축의 부식이나 교류 전자장 신호를 발생시키는 요인이 되므로 완전한 억제 대책은 되지 못한다. 또한 정상 상태의 수동 축 접지장치의 경우에도 축과 선체간의 저항이 약 1 [mΩ]정도로써 완전한 접지는 이루어지지 않는다. 최근 이와 같은 문제와 관련하여 양극의 효율적 배치를 통한 전자기장 감소에 대한 연구[9], 수중에서 발생하는 불분명한 방식전류 예측에 관한 연구[10] 등이 이루어지고 있다. 그러나, [9]의 연구는 발생된 자기장성분을 줄여주는 방법에 대한 연구로 실질적인 교류 전자기장 성분을 제거하지 못한다는 문제점을 가지고 있고, [10]의 연구는 다양하게 발생된 불분명한 방식전류성분을 예측하여 전자장에 대한 발생량을 연구한 것으로, 본질적으로 자기장 감소에 대한 대책이 언급이 되어 있지 않다. 또한, 극저주파 신호 저감에 관한 연구 [11]에서는 축 접지 시스템을 통한 저주파 교류 자기장을 제거하는 방법에 대하여 언급하고 있지만, 실질적인 제어 방법이나 구체적인 설계에 관한 연구가 되어 있지않다.
따라서 본 논문에서는 프로펠러와 축계 사이에 별도의 장치를 연결하고 프로펠러와 축계통을 통해서 선체로 흐르는 전류를 별도의 장치를 통해 선체로 흐르도록하여, 축계에 누적피로나 수명저하를 방지하고, 또한 부식 방지 전류가 일정하게 유지할 수 있도록, 축 전위변화를 능동적으로 대처하여 동작하는 축 접지 시스템설계에 대하여 연구하였다. 선행 연구에서는 볼 수 없었던, 교류전자기장 성분으로 인한 자기장 발생에 대하여 이론적으로 해석하고, 교류 전자기장 성분을 발생시키는 교류 전류 성분을 제거할 수 있는 실제적인 제어시스템을 설계하고, 모의실험을 통하여 그 성능을 검증하였다.
현재 많이 사용되고 있는 축 접지 시스템은 선박 프로펠러의 주축과 축과의 회전접촉을 위하여 슬립링과 브러쉬, 그리고 축 지지대로 구성이 된다. 강도와 접촉 전도성을 높이기 위하여 은합금 브러쉬를 사용하며, 브러쉬와 슬립링 밀착을 위하여 스프링 밴드가 이용된다. 이를 일반적으로 수동 축 접지라 부른다. 이에 반해 외부전원식 부식방지장치는 선체의 부식을 방지하기 위하여 일정전위를 유지하도록 전원 시스템의 전류를 양극을 통하여 수중에 방식전류를 내보내게 되면, 이 전류는 도장이 100% 완벽할 경우 전류가 프로펠러를 통해 흘러 들어오게 되고, 이 전류는 베어링-슬립링-브러시-축 지지대-선체 경로를 통하여 전원장치의 접지로 흘러 들어가게 된다.
수동 축 접지 시스템에서는 기본적으로 축 접지 저항을 아주 낮게 만들어, 방식전류의 영향을 최소화 하는 것이며, 결국 축 접지 저항의 상태에 따라 큰 영향을 받게 된다. 또한, 교류 변화가 일정 크기 이상 일어날 경우, 시스템에서 제어할 수 없기 때문에, 축계 시스템에 악영향을 미치게 된다.
방식전류는 프로펠러 회전에 의하여 경로 상의 임피던스 변화와 와전류에 의한 기전력 성분이 발생되므로, 전체 방식 전류가 교류 성분이 되게 된다. 따라서 수중으로 방사하는 전자장 성분 중 교류성분이 포함되게 되며, 이 교류 자기장 성분으로 인하여 감시 방어 체계의 최종 감지 신호로 이용될 수 있기 때문에, 교류 자기장 성분을 제거할 수 있는 방법이 필요하다. 본 논문에서 제안하는 제어 방식은 능동적으로 축 접지로 흐르는 전류를 제어하는 시스템이다. 전체 제어 개념 설계의 접근은 간단하다. 회로 상의 한 경로에 흐르는 전류가 경로 상에 나타나는 변화 성분 때문에 변화하게 되는데, 이 때 병렬 형태로 연결된 또 다른 루프에서 변동되는 성분만큼의 전류를 보상하게 되면, 전체 전류의 변동이 없다. 한 쪽 경로의 전류 흐름 제어를 통해서 병렬 형태의 부하 시스템의 전위를 일정하게 유지하도록 하는 제어 개념이다.
수중 전자장에 대한 이론적인 접근은 전자장의 기본적인 원리로부터 해석해 나갈 수 있다. 양극성을 가진 정전하는 정전기장을 발생시키고, 전하의 일정속도운동, 즉 직류전류 또는 정자하(자극)는 정자기장을 발생 시킨다. 또한, 시변장은 가속된 전하나 시변전류에 의해서 발생된다.
전자장 해석의 핵심이 되는 Maxwell 방정식은 다음과 같다.




Maxwell 방정식에 대한 보조방정식은 식 (5), (6), (7)과 같다.



이를 근간으로 하여 시변자계와 시변전계의 지배방정식(governing equation)을 다음과 같이 정리할 수 있다. 시변자계의 경우, 자속밀도를 자기벡터 포텐셜로 식 (8)과 같이 나타낼 수 있다.

식 (2)와 (8)을 이용하여 전계의 회전연산에 대하여 자기벡터 포텐셜로 식을 나타내면 식 (9)와 같다.

식 (9)를 좌변으로 정리하고, 전계에 관한 식을 전위를 이용하여 나타내면 식 (10)과 같다.

전체 전류 밀도는 외부에서 흘려주는 전류에 의한 성분과 자속이 변하면서 발생하는 전류 성분으로 구분할 수 있으며, 이를 식 (11)로 나타낼 수 있다. 이는 곧 선체에서 전원장치에 의해 해수로 흘려주는 전류 성분과 선체가 운행하면서 자속을 쇄교하여 발생하는 운동기전력에 의한 성분, 그리고 임피던스 변화에 의한 변환 기전력에 의한 성분으로 볼 수 있다.

시변 전류 밀도 성분을 변환 기전력 성분과 운동 기전력 성분으로 나타내고 식 (10)을 이용하여 자기벡터 포텐셜과 전위 성분으로 유도하면, 식 (12)와 같이 나타 낼 수 있다.
자계의 회전 연산식을 식 (8)을 이용하여 자기벡터 포텐셜 표현식으로 유도하게 되면 식 (13)과 같이 나타낼 수 있다.

식 (13)이 식 (11)과 같으므로, 이 두 식을 이용하여 시변 자계에 대한 지배 방정식을 구하면 자기벡터 포텐셜과 전위, 속도에 관한 관계식을 식 (14)와 같이 유도해 낼 수 있다.
정상상태에서의 전류밀도는 회전장이므로, 회전장의 발산은 식 (15)과 같이 0이 됨을 알 수 있다. 회전연산의 특성으로부터 벡터의 회전연산의 발산은 0이 되며, 따라서 시변 전류밀도를 식 (16)과 같이 전류 벡터포텐셜로 표현할 수 있다.


전체 자계는 외부에서 가해준 자계와 시변 전류가 흘러 발생하는 자계 성분으로 식 (17)과 같이 나타낼 수 있으며, 시변 자계 성분에 대한 시변 전류 밀도와의 관계를 식 (18)과 같이 표현할 수 있다.


(16)과 (18)을 이용하여 정리하면 식 (19)와 같이 시변자계에 대하여 전류 벡터 포텐셜과 전위에 관한 식으로 유도할 수 있고, 다시 전체 자계에 대하여 정리하면 식 (20)과 같이 나타낼 수 있다.


시변 전계를 시변 전류 밀도와의 관계식으로 표현하고, 식 (16)을 이용하여 정리하면 식 (21)과 같이 나타낼 수 있다.

식 (2)와 식 (20)을 이용하여 식 (22)와 같이 유도할 수 있다.
따라서 시변 전계에 관한 지배 방정식을 전류 벡터포텐셜과 외부에서 가해주는 자계 성분과 전위에 의해 식 (23)과 같이 유도할 수 있다.

그러므로 시변 전계와 시변 자계에 대한 지배 방정식을 이용하여 시변장에 대한 성분을 고려하여 수학적인 해석을 수행하여 수중에서 발생하는 전자장 성분을 해석할 수 있다.
선박에서 발생되는 수중 전자장에 대한 수학적 모델을 기반으로, 기구적 모델링을 통하여 전자장 발생에 대한 분석을 진행하였다. 먼저, 간이 모델링을 통해서 해석 가능성을 검증한 뒤, 실제 모델과 유사한 모델링을 통하여 분석하였다. 실제 지구자기장에 의한 영향도 고려되어야 하나 본 해석에서는 선박의 부식 방지 장치에 의해 발생되는 전자장 성분을 분석하기 위하여 지구 자기장의 영향은 무시하였다.
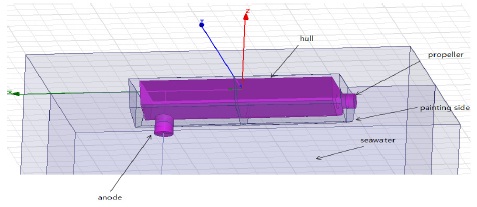
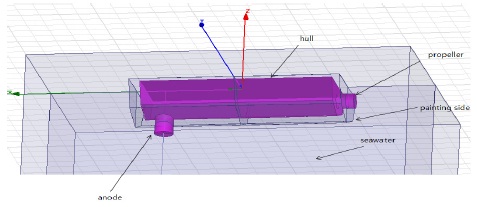
anode-hull-propeller 는 전도성이 뛰어난, steel 재질로 모의하고, 도장면을 절연체로 모의하였다. 선박에서 anode와 프로펠러만 해수와 접촉을 한 상태이며, 그 외–z축은 바닷물로 재질을 모의하였다.
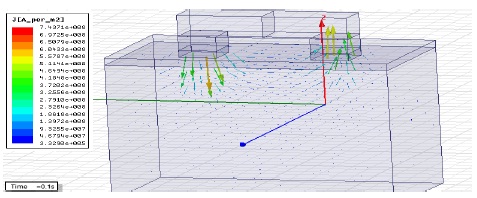
전류는 anode를 통해 해수로 흘러나가는 형태로 구성하였다. 그림 1은 선박 모형 구조를 모델링한 형상을 나타낸다. 선체 내부의 전원에 의해서 anode를 통해 해수로 전류가 흘러나가는 형상을 이루고 있다.
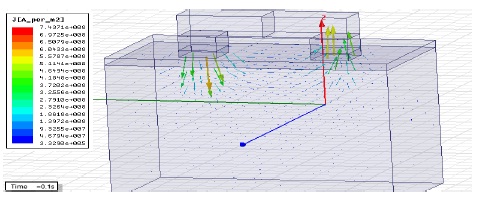
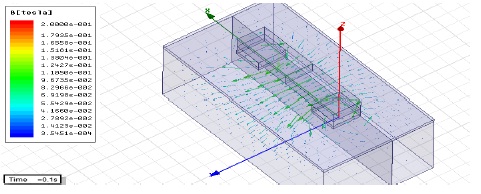
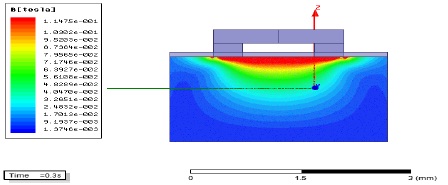
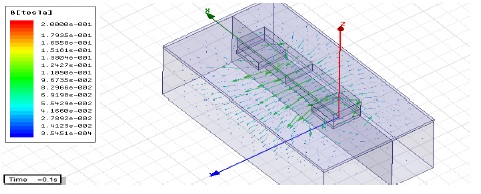
그림 2는 선박을 형상화한 간이 모델에 대한 전류 흐름에 대한 밀도 벡터의 결과이며, 그림3은 임피던스 변화에 의한 교류성분 발생시 자속밀도의 변화를 모의한 결과이다. 간이 모델을 통하여 전자장의 해석 과정과 간략한 결과를 통하여, 실행 가능성을 검증하였다. 이제 실제 선박 형상을 토대로 하여 축소 모델에 대한 전자장 시뮬레이션을 진행하였다. 실제 선박의 해석에 필요한 부분만 형상화 하여 그림4와 같이 모델을 구성하고, 약 5000:1 비율로 축소하여 모델을 형상하여, 전자장을 해석하였다.
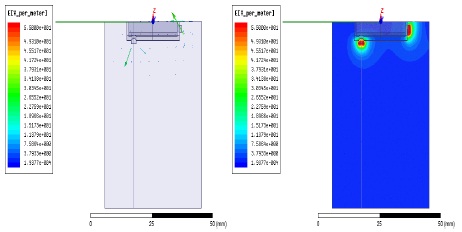
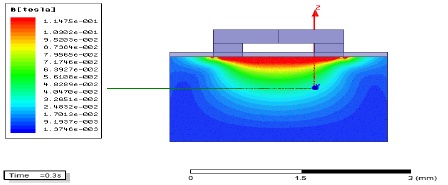
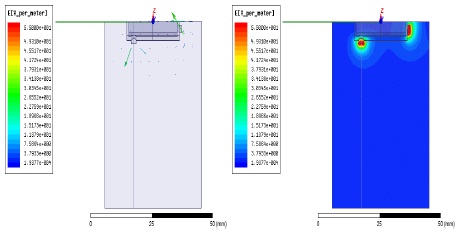
그림5는 선박의 축소모형에 대한 전계 벡터 성분과 크기를 모의한 결과를 나타내며, 전류 흘러나가는 양극봉 끝부분과 해수를 통해 전류가 흘러들어오는 프로펠러 부분에서 큰 전계가 발생되고 있음을 알 수 있다. 이와 유사하게 자속밀도 또한 형태가 유사하게 나타나고 있음을 알 수 있었다.
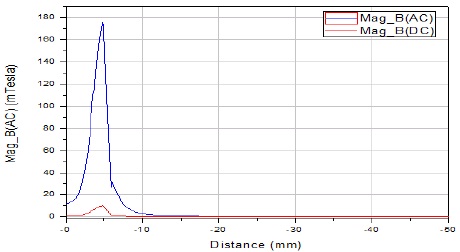
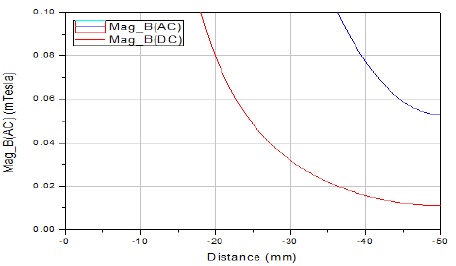
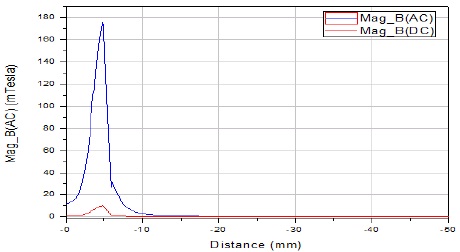
그림 6은 축소모형에서 실제 선박에서 프로펠러 회전이 없는 경우와 프로펠러 회전의 의해 교류변화가 발생하는 것에 대한 비교 모의 결과이다. 양극봉 끝부분에서 -z축 방향의 선상에서 나타나는 자속밀도의 크기를 추출한 결과이며, 거리가 멀어질수록
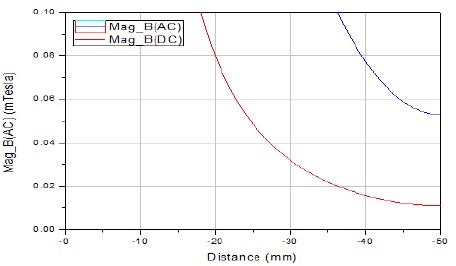
그림7은 해석시 최대거리에서 존재하는 자속 밀도의 크기를 알아보고자, 그림 6의 결과 그래프의 y축을 0-0.1[mT]사이만 확대하여 거리의 변화에 따른 자속의 변화를 도출한 결과이다. 환산거리 250[m](그래프 상에서 50[mm]인 점)에서 능동 축 접지 시스템 적용 전후의 자속밀도 크기를 비교한 결과를 나타낸다. 두 경우 모두 소스에서 발생된 자속이 거리가 멀어지면서 점점 줄어들고 있는 것을 볼 수 있으며, 청색실선은 ASG 시스템이 적용되지 않은 경우로써 50[mm]에서 약 50[uT]정도의 자속이 나타남을 볼 수 있다. 적색 실선은 ASG 시스템이 적용된 경우로써 50[mm](환산거리 250[m])거리에서 약 10[uT]정도의 자속이 나타남을 볼 수 있으며, 두 시스템 간의 자속 밀도 차이가 약 5배 정도 남을 알수 있다.
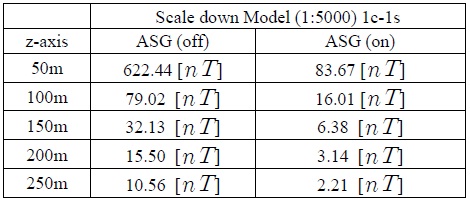
표 1은 실제 축척을 고려한 실제 거리에서의 예상되는 환산 자속밀도의 크기를 계산하여 나타낸 표이다. 능동 축 접지 시스템 적용 후, 적용 전 대비 약 1/5가량 줄어든 수치를 볼 수 있으며, 실제 선박에서 각각의 거리에서 예상되는 자속밀도의 크기를 예상할 수 있다.
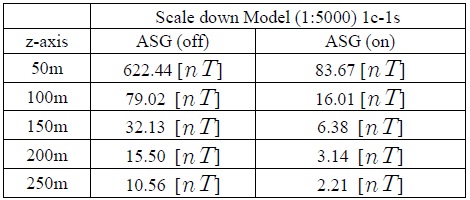
거리에 따른 자속 밀도 해석 결과 비교
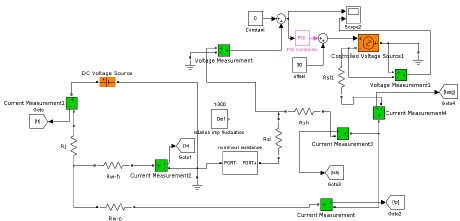
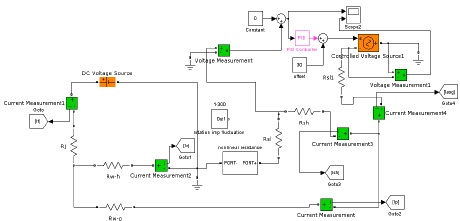
제안하는 제어 시스템을 모의하여 제어 시스템의 성능을 평가하였다. 앞의 2.1, 2.2절에서 언급한 접지 시스템의 구성을 기반으로 하여, 2.3절에서는 프로펠러 회전에 의해서 발생되는 교류 성분에 대한 전자장 발생을 해석하였으며, 2.4절에서는 수학적 해석모델을 기반으로 한 기구적 모델링을 통하여 축소 모형을 모의하였다. 여기서는, 2.4절에서 설계된 축소모델의 기구적 구조(염도 30[‰]의 해수, 철 재질의 선체, 청동 합금 계열 소재의 프로펠러, 선체도장 등)를 전기적 등가회로로 변환하여 matlab기반의 전기적 모델링 구조를 설계하고, 이를 토대로 제어 시스템을 설계하였다. 제어시스템은 레퍼런스제어, 오프셋제어, 비례적분제어로 각각 분리하여 성능 및 특성을 분석하였고, 각 제어의 특성을 고려하여 장점만을 접목한 ROP (Reference + Offset + PID Saturation ) 제어시스템을 제안한다. 그림 8은 본 논문에서 제안하는 능동 축 접지 시스템에 대한 ROP 제어 시스템이며, 이는 축 전위를 일정하게 유지하는 제어 시스템과 축 전류를 일정량 이하로 제어할 오프셋 제어 시스템에 실제 PID 출력 포화를 적용한 시스템이다. 실제 제어 시스템의 경우 전류제어를 위하여 트랜지스터의 베이스를 제어하여야 하며, 제어출력의 최대, 최소가 시스템의 하드웨어에 의해 결정되어 있는 경우가 대부분이며, PID 출력 포화는 하드웨어의 최대, 최소값을 초과하여 출력할 수 없음을 의미한다. 따라서 이러한 부분을 고려하여 제어 시스템에 반영하여 시스템의 성능을 모의하였다. 또한 축 접지의 회전에 의하여 접지 장치의 임피던스 변화 성분을 비선형 저항모델로 등가화 시켜 전체 축 접지 제어 시스템을 모의 하였다.
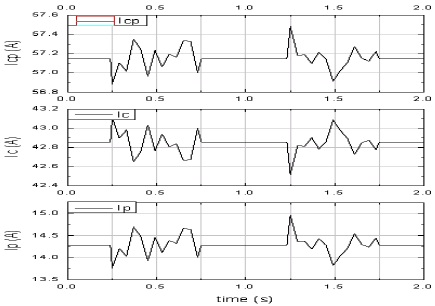
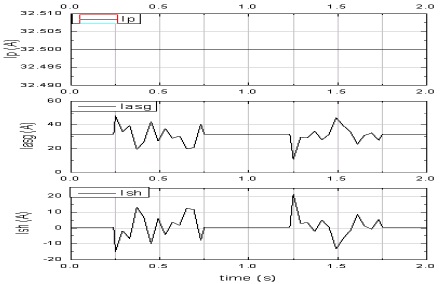
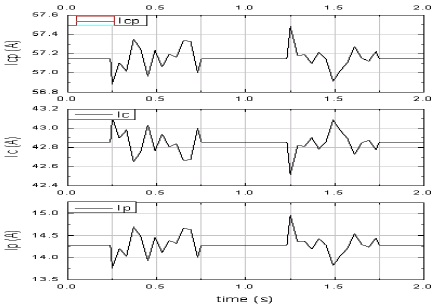
모의 실험 환경은 실제 해수의 평균 염도를 고려한 30[‰]의 해수로 가정하였으며, 유전상수 80, 전도율은 4[mho/m]로 가정하였다. 약 5000:1 비율로 축소된 모델을 기반으로 하였으며, 선체(steel) 및 프로펠러(청동 합금 계열) 등은 실제 선박의 소재 및 구성을 기반으로 하였다. 모의실험을 위하여 선체 도장의 약 10%정도의 부분 도장 손실을 가정하였는데, 이는 부식 방지장치의 30% 용량에 해당되며, 마찬가지로 부하로서 약 30% 정도에 해당한다. 선박의 부식 방지 장치는 1개의 양극을 통해 동작하는 장치를 모의하였다. 실험결과는 축 접지제어 시스템이 적용되지 않은 경우와 적용된 경우의 비교를 나타낸다. 그림 9는 수동 축 접지 시스템을 적용한 경우 선박 운행에 따른 프로펠러 회전시 나타나는 각 전류의 파형을 모의한 결과이다.
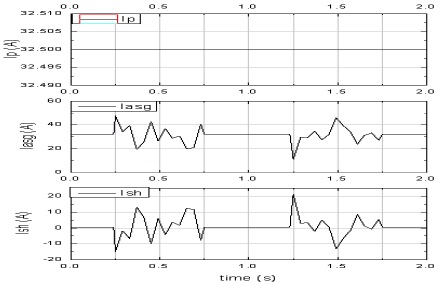
회전에 의하여 프로펠러 전류 경로 상의 임피던스 변화가 발생하고, 이에 따른 전류 변화가 전체 방식 전류 및 각 전류에 교류 성분을 발생 시키고 있음을 알 수 있다. 선체에서 해수로 흘러 나가는 전류는 각각 직류 전류의 형태를 유지하고 있음을 확인할 수 있으며, 그림 10과 같이 선체 내부에서는 프로펠러 회전에 따른 축 전류 변화 성분을 감지하여 변화량을 능동 축 접지 시스템에서 레퍼런스 제어 시스템을 통하여 제어하고 있는 것을 보여주고 있다. 따라서 변화 성분을 내부에서 보상을 하고 있기 때문에 해수를 통해 프로펠러로 흘러들어가는 전류(
능동 축 접지 시스템을 적용하지 않은 경우, 축-선체 경로 상의 임피던스 변화 영향을 그대로 받게 됨으로, 해수 전류 경로 상에 교류성분이 포함됨을 알 수 있다. 결국 이 교류 성분이 교류전자장을 발생시켜 수중 감시체계의 탐지원이 될 수 있다. 반면, 능동 축 접지 시스템을 적용한 결과, 해수에 흐르는 전류 성분에 교류 성분이 포함되지 않음을 알 수 있다. 따라서, 능동 축 접지 시스템을 적용하여 선박의 부식 방지 장치에 의해 발생되는 교류 전자장 신호원을 제거할 수 있음을 알 수 있다. 모델링을 기반으로 한 모의실험 결과, 약 10% 도장손실에 대해서, 수동 축 접지 시스템에서 선박 프로펠러의 회전에 의한 교류 성분이 검출되었는데, 약 100[mV]이상의 축 전위와 약 3-4[A]의 전류 변동성분을 보였다. 능동 축 접지 시스템을 적용한 경우, 축 전위 성분이 2[mV] 이내로 유지되었으며, 프로펠러 전류 경로상의 교류 전류 성분이 최대 99.9%(제어 트리거동작시 약간의 변동 성분 존재) 가깝게 제거됨을 확인 할 수 있었다. 교류 성분의 제거라 함은 부식 방지 장치에 의해서 부식을 방지하기 위한 방식 전류를 해수에 방사하는데 이 해수에 방사되는 전류가 직류 성분 외에 교류성분이 포함 되는지의 여부에 따라 가부를 확인할 수 있다. 능동 축 접지 시스템을 적용함으로써 레퍼런스 제어 모델에서는 축-선체 전위의 변동에 따라 능동 축 접지 시스템에서 전류의 변화성분을 능동적으로 보상함으로써 해수-프로펠러로 거쳐 형성되는 전류가 해수상에서 직류성분을 유지함을 알 수 있다.
반면 선체 내부에서는 축 전위 변동에 따른 변화를 제어 시스템에서 보상하고 있음을 확인할 수 있다. 그러나 레퍼런스 제어 모델에서는 축-선체로 흐르는 전류를 제어할 수 없어, 임피던스 편차에 따라 전류가 분배되어 지고, 이 전류로 인하여 축계 시스템에 영향을 미칠 수 있다고 생각할 수 있다. 따라서 각 경로 상의 전류를 제어 시스템에서 제어가 가능한 오프셋 제어 시스템을 반영하여 축 전류와 능동 축 접지 제어 장치로 흐르는 전류의 크기를 제어할 수 있도록 제어 시스템을 제안하였다. 그리고 실제 하드웨어 상의 출력 제한을 고려하여 제어모델에도 이를 반영하여 설계하였음을 알수 있다. 전체적으로 제어 시스템의 속응성과 오차 제거율 등이 뛰어난 시스템이 설계되었으며, 향후 실제 시스템 개발에 있어서도 본 논문의 실험결과가 도움이 될 것으로 기대한다. 향후, 실제의 선박에 더욱 근접한 시스템을 모의하여, 많은 실험을 통해 문제점과 개선점을 분석해 나갈 예정이다.