최근 대형화, 중량화의 추세를 가지는 해양 공사에서 대우조선해양은 해양 구조물에 대한 설치 및 이동 작업을 위해서는 안벽의 수심 및 수중 돌출물(Debris) 확인이 선행되어야 하며, 이러한 요구사항은 주문주 MWS(Marine warranty surveyor)에 기본으로 명시되어 있다. 예를 들어, 드릴쉽의 DP(Dynamic positioning) 추진기 설치 작업과 육상 건조한 Fixed platform(고정식 해양설비)을 진수 시의 Load-out(선박을 끌어내림) 작업이 여기에 해당된다. 또한 당사 야드뿐만 아니라 해양 프로젝트 관련 작업을 수행하는 가족사 및 협력사에 대한 수심측량 및 Debris 체크 요구 또한 증가하고 있으며, 수심측량 검사를 용역업체에 의뢰하는 경우에는 많은 비용 발생과 해양 공사의 잦은 일정 변경에 따라 많은 문제가 발생하게 된다. 이를 해결하기 위해 주문주의 요청 시에는 당사에서는 측면주사음탐기(Side scan sonar)를 이용해서 해저면 음향영상과 수심정보를 취득하여 즉각적으로 대응하고 있으며, 주문주 MWS의 요구사항인 Survey report를 제출하여 주문주와의 신뢰와 당사의 역량을 높이고 있다.
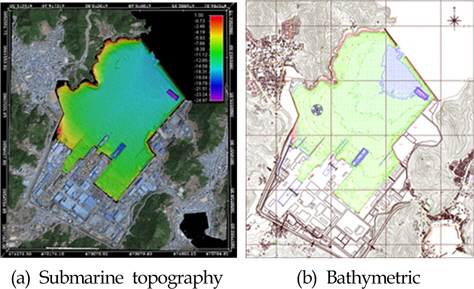
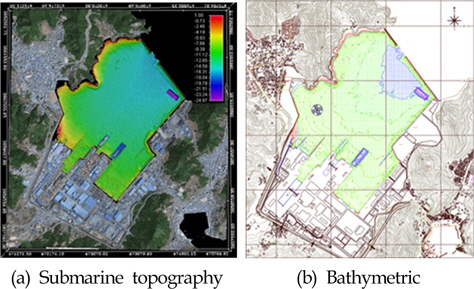
최근 이러한 해양 프로젝트에 대한 중요성을 인식하여 당사에서도 2006년 Fig. 1과 같이 당사의 내항 해저지형 지도를 제작하였다.
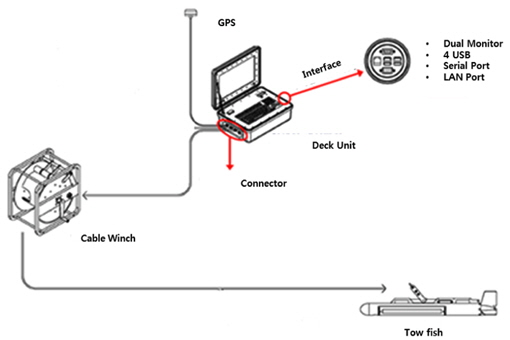
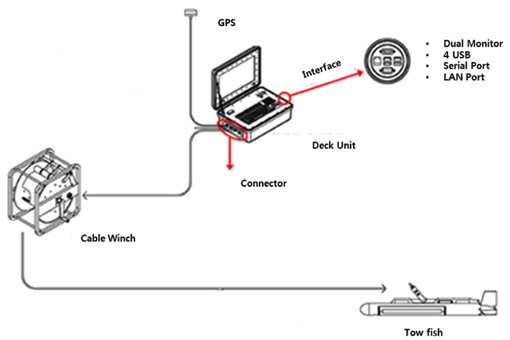
측면주사음탐기 시스템의 구성은 Fig. 2와 같이 신호와 영상처리장치인 Deck unit(방수타입 PC), Towfish(수중예인체), Cable winch 그리고 GPS(Global positioning ystem)으로 구성되어 있다.
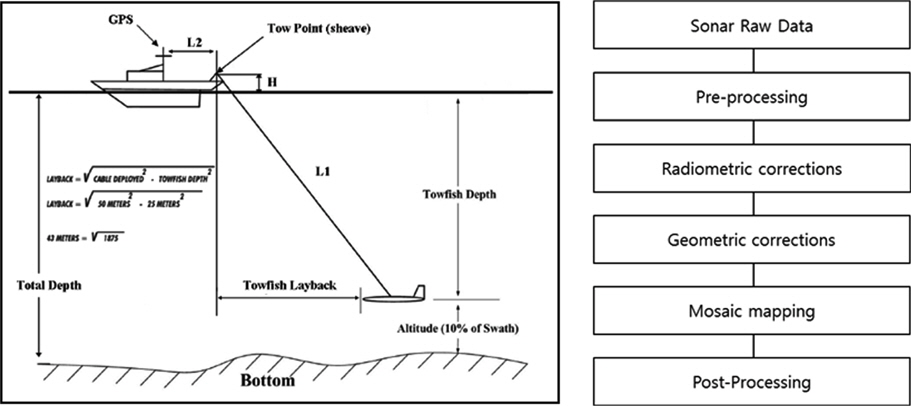
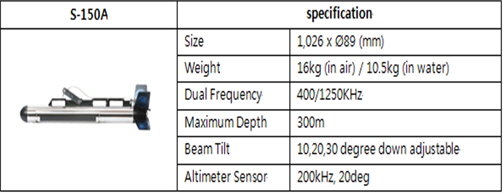
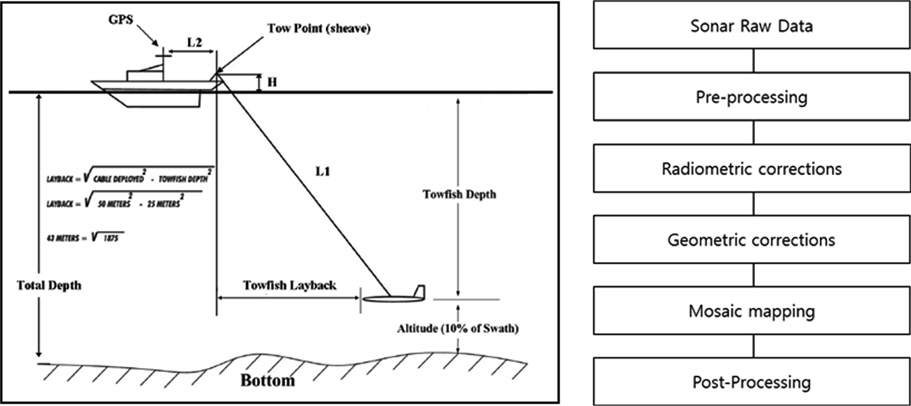
배터리가 내장된 일체형 Deck unit은 방진 방습 구조를 가지고 있으며, 소형보트의 협소한 공간, 해수 침입, 전원 공급, 안전 사고 예방 등의 대비한 시스템이다. Towfish는 좌·우측에 각각 1개의 초음파센서(Transducer arrary)를 장착하여 이를 견인하면서 실시간으로 해저면의 상태를 관측, 분석하는 장치이다(Fish and Carr, 1990). 분실방지용으로는 안전핀과 위치추적용 음파발신기(Pinger)를 사용하고, 예인 케이블은 슬립링(Slip-ring)이 장착된 케이블 릴을 사용한다. Fig. 3은 사이드 스캔 소나의 운용개념과 자료 처리를 플로우차트로 구성했다. Towfish의 레이백은 선박이 Towfish를 예인할 때 선박과 Towfish간의 거리를 의미한다. Towfish의 레이백을 통해 Towfish의 예인 시 위치를 파악 할 수 있고, 선박에 위치한 GPS와 Towfish간의 거리를 이용하여 획득한 자료에서 GPS와 Towfish간의 오차로 인한 불일치를 보정할 수 있다. Towfish의 레이백은 Towfish의 수심정보와 Towfish를 예인하는 케이블길이 값을 피타고라스 이론을 통해서 계산 할 수 있다. 그러나 선박의 GPS 위치가 선미의 Towfish의 예인 포인트가 아닌 선박 중앙에 위치해 있어서 위치정보를 파악 할 경우 다소의 오차가 발생 할 수 있으므로, 레이백 계산 시 GPS에서 선박 선미까지의 케이블 길이를 전체 예인 케이블 길이에 포함하고 선박에서 해수면가지의 높이를 수심정보에 포함시킬 경우 발생하는 오차를 줄일 수 있다. Towfish 사양은 아래 Fig. 4를 참고하기 바란다.
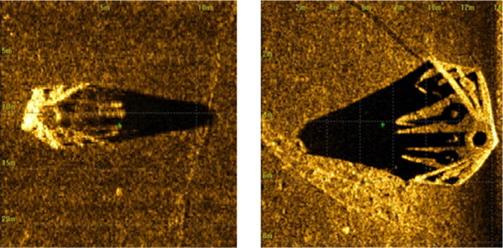
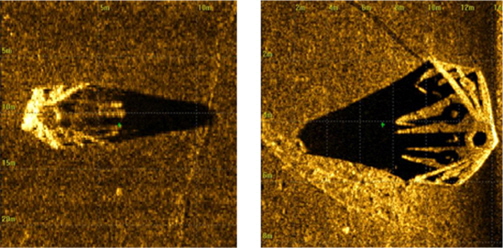
측면주사음탐기로 인공어초를 촬영한 400kHz & 1250kHz 해저 영상이다. Fig. 5에서 보듯이 1250kHz 영상의 해상도가 좋음을 알 수 있다.
옥포조선소 내항에서의 측면주사음탐기의 운용은 해저면 수심과 Debris를 조사하게 되었고, 취득한 자료는 Survey report를 작성해서 주문주에게 제출하게 된다. 탐사선은 회사내의 1톤 규모의 Tug-Boat를 사용하였으며, 음파 탐사 시 항해속 1.5~2m/s를 유지했다. 토우피시 같은 경우 작업선 우측 후미에 예인을 하고, 케이블은 약 10m정도의 길이를 풀어준 후 수심변화에 따라 케이블 길이를 변경하면서 운용을 했다. 실제 GPS위치와 케이블의 길이 변경에 따른 토우피시의 위치를 보정하기 위해 선박으로부터 토우피시까지의 수평거리 입력창에 수심정보를 입력함으로써 정확한 위치를 파악할 수 있다. 탐사선의 위치는 정밀위성항법장치인 DGPS(DSM232, Trimble)를 이용해서 위치정보를 수집했다. 음향영상 및 측심정보는 측면주사음탐기를 사용하여 데이터를 취득하였고, 목표물의 사이즈가 클 경우 400KHz 주파수와 100~150m의 촬영폭(Swath)으로 사용했고, 그 물체가 매우 작을 경우 1250KHz와 45m의 촬영폭으로 사용했다. 넓은 촬영폭은 탐색시간을 줄일 수 있지만, 주어진 목표물이 탐지되기도 어렵고, 또한 탐지되어도 식별이 어려운 경우가 생기기 때문에 지나치게 넓은 촬영폭 사용은 자재했다. 옥포조선소 내항의 지형은 거친 해저면이 아닌 평탄한 해저면이 이었기에 목표물이 더욱 뚜렷하게 보인다. 작업 시 고려해야 할 사항으로 수심정보에 따른 토우피시 고도와 예인 속도를 일정하게 유지하는 것이다.
시간이 지남에 따라 태풍의 유무 및 외부에서 유입되는 퇴적물로 인하여 수심은 계속 변하므로 수심 조사는 계속되어야 하며, 해양 공사로 인한 작업장에 지장물이 생길 수 있으므로 Debris 등을 체크해야한다. 이와 같은 해저 지형의 변화는 지속적인 데이터베이스(DB)로 구축할 필요성이 있다.
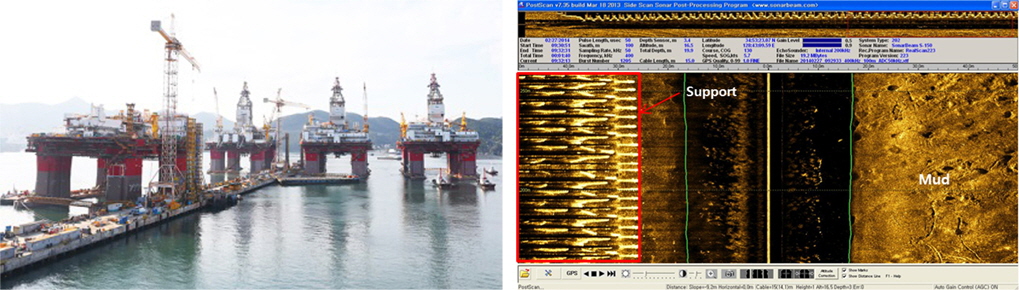
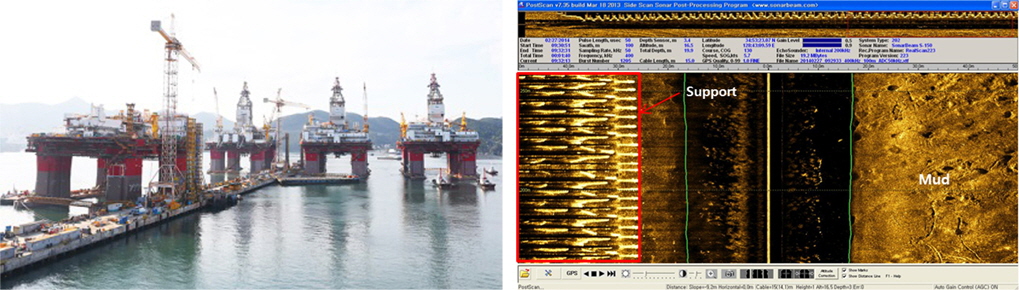
Fig. 6은 대우조선해양에서 현재 건조 중인 반잠수식 시추선(Semi-Rig)이다. 반만 바닷물에 잠기는 형태의 선박으로서 파도에 의해 받는 영향을 최소화하기 위한 형태로 만들어져 있어서, 선박에 비해 물에 닿는 면적이 매우 작아 파도의 영향을 적게 받으므로 수직 운동이 크게 줄어드는 장점이 있고, 일반적인 선박에 비해 풍랑이 심한 해역에 투입된다. 우측 그림의 Sonar image는 안벽 근처를 촬영한 해저 영상인데, Sonar image의 좌측면은 안벽을 지탱하기 위한 수중에 설치된 Support이고, 우측면은 머드로된 해저지형이다. 조사 목적은 Thruster(추진기) 설치 가능 여부와 시운전 시 Thruster가 해저면과의 충돌여부를 판단하기 위해 해저면 수심과 수중둘출물이 있는지를 조사하는 것이다. 측정 결과 Thruster 설치 시 문제점이 없었고, 해저면 영상에서 보듯이 특별한 Debris가 없는 것으로 확인되었다.
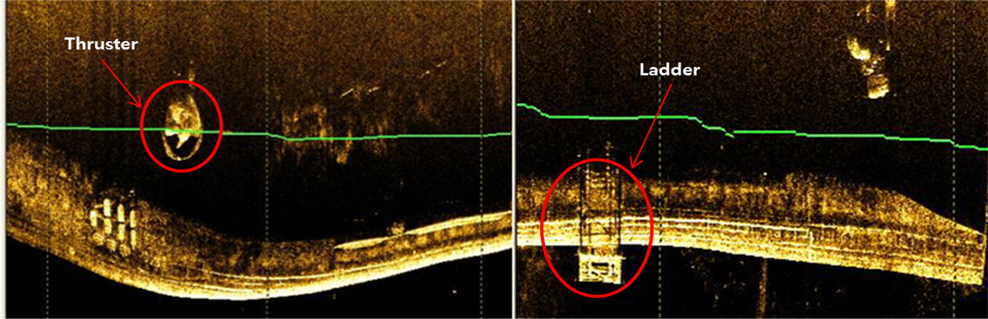
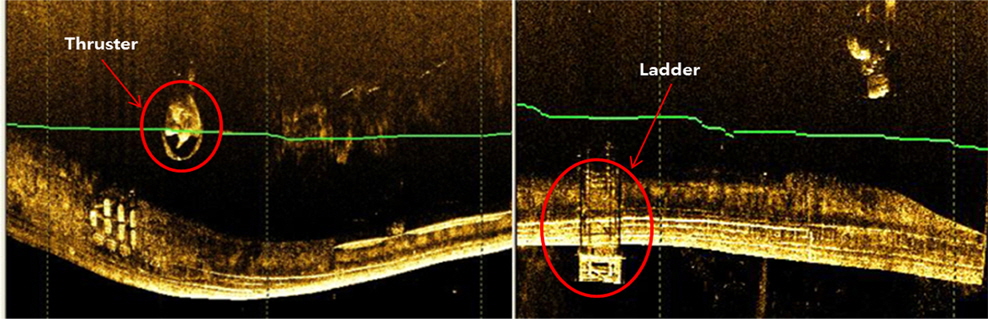
Fig. 7은 Drill-ship이다. 시추설비에 속한 Drill-sShip은 바다에 구멍을 뚫어서 자원을 시추하는 선박이다. 보통 길이가 220m~230m 정도이며, 폭 35m~42m 정도로 통상 극심해에서 시추작업을 할 수 있다. 우측 그림의 Sonar image를 보면 우측면은 3개의 Thruster 설치를 위해 Drill-ship 아래 Cradle이 놓여진다. Cradle 위에 Thruster를 올려 놓고, 수중 설치하기 때문에 수심 및 Debris를 조사해야 한다. 또한 이중계류 접안에 따른 안벽 수심 및 Debris 조사도 했다. Fig. 8은 Drill-ship의 Thruster 및 Ladder를 촬영한 영상이다.
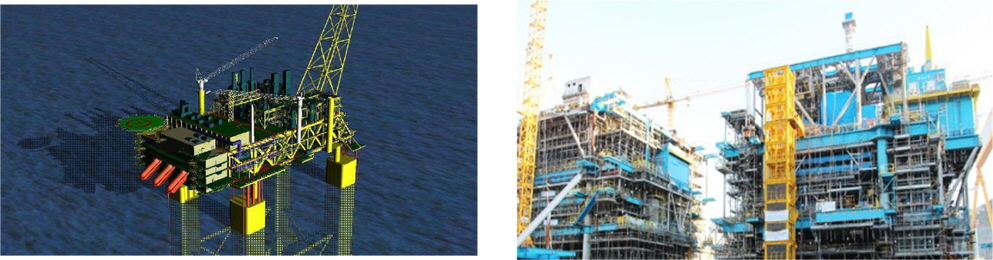
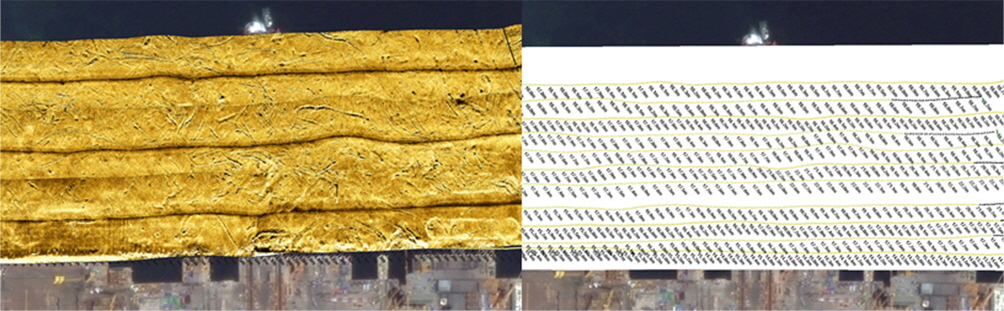
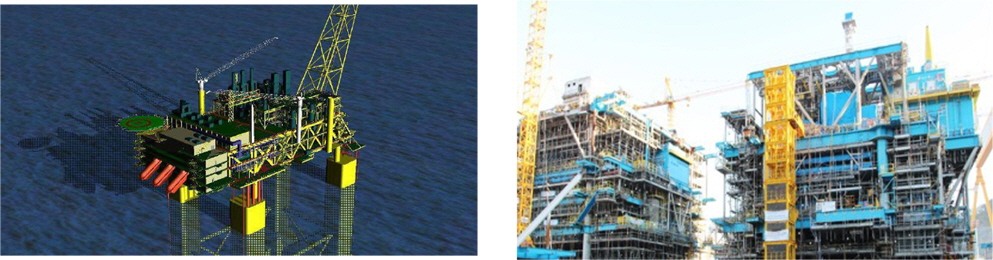
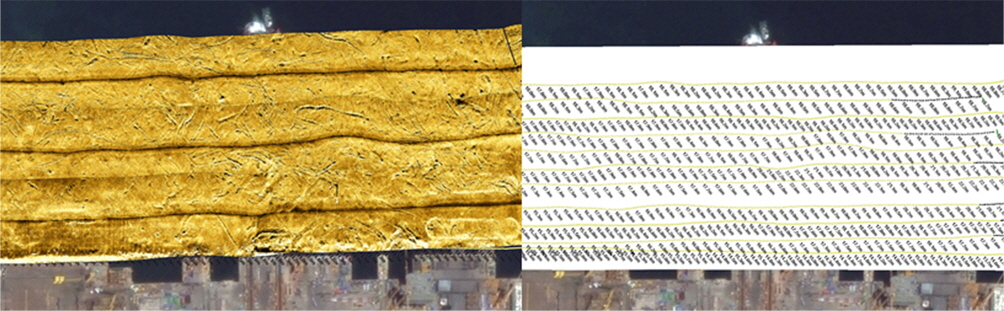
Fixed platform은 천연가스 생산용 해양 설비로, 가스 채취 및 정제를 담당하는 상부구조물(Topside)과 이를 받치는 하부구조물(SGS, Steel gravity structure)구성된다. SGS계류 및 안벽이동, 마산 인근 실리도 해역에서의 SGS float-in, DSF(Deck support frame) Load-in(선박을 끌어올림)을 위한 안벽에서 S/A(출항) 경로 수심측량 및 Topsides load-out을 위한 해저면 Debris등 한 프로젝트에서 다수의 Survey를 통해 D/L(인도)까지 업무를 지원했다. 또한 Fig. 10은 Fixed platform을 Load-out 작업 후 운송선이 내항에서 외항으로 나가는 도면이다. 그림은 KML(Keyhole markup anguage)파일을 생성해서 모자이크 한 후 구글어스에 올린 이미지이다. 작업구역은 내항에서 외항으로 나가는 이동경로와 SGS float-in할 위치이다. Fig. 11 또한, 안벽 근처 해저면 영상과 해저면 수심측량을 한 후 모자이크 처리를 통해 구글어스에 올린 이미지이다.
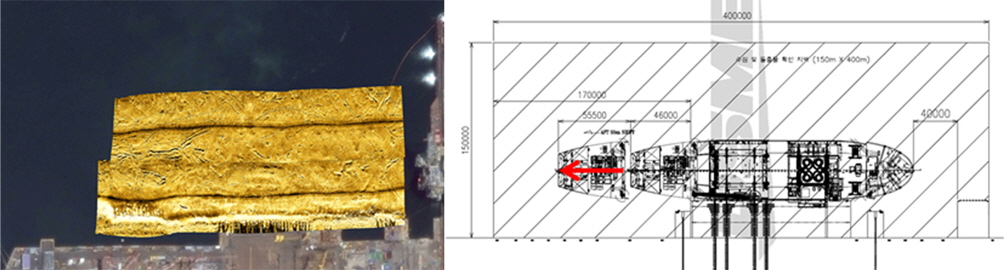
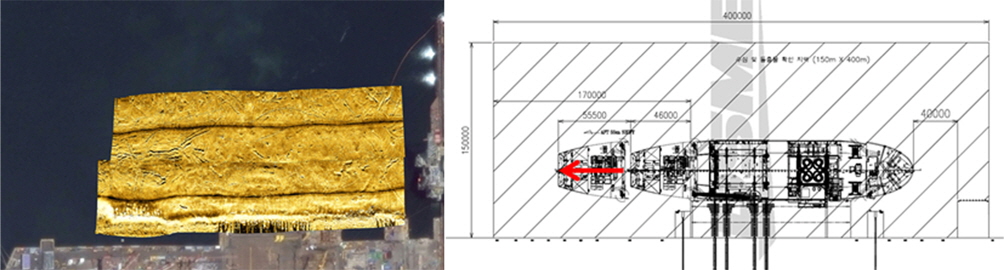
Fig. 12 안벽 주변 해저 영상과 HTV(Heavy-lift transport vessel) 안벽 배치도인데 도면에 표기된 것처럼 Module loadout을 위해서 왼쪽으로 이동을 해야한다. 수심이 낮기 때문에 HTV의 이동에 따른 수심 및 위치를 파악해야 했고, 주문주 MWS 요구사항인 수심 및 Debris 확인한 이미지이다.
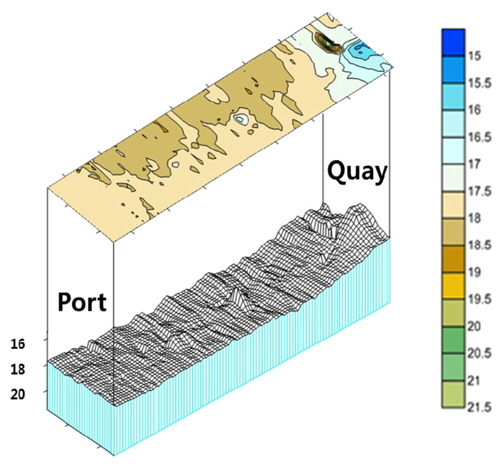
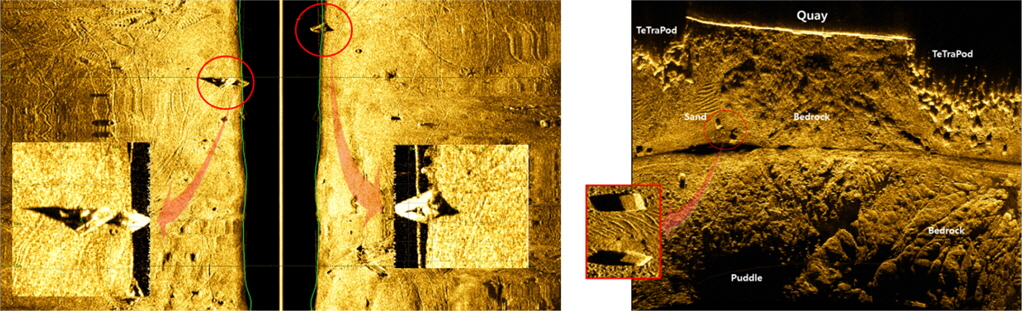
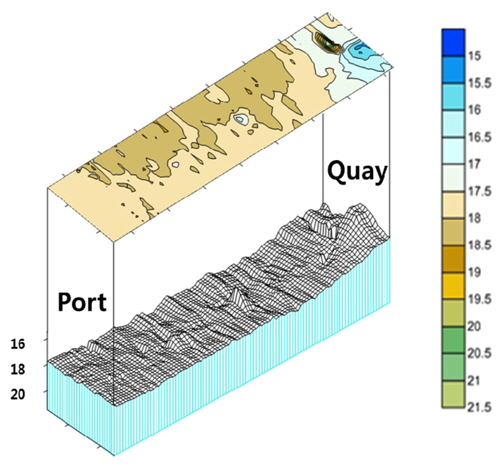
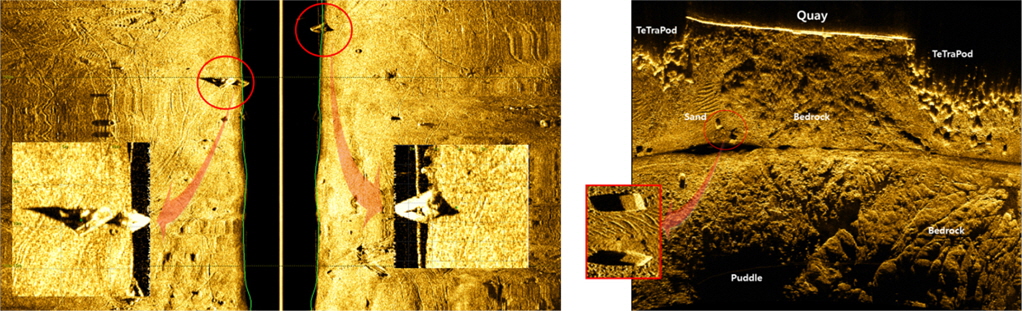
Fig. 13은 XYZ 데이터 파일을 규칙적인 간격을 갖는 Grid 데이터 파일로 만들어서 이것을 기초로 하여 Contour map(등고선 지도)을 그릴 수 있다. 안벽에서 외항(Fig. 10 DSME Yard)를 수심 측량한 데이터를 이용해서 등고선으로 표시한 그림이다. 이 그림을 보면 안벽에서 외항으로 수심이 깊어지는 것을 확인 할 수 있었다. Fig. 14 좌측그림은 해상크레인 작업시 Anchor & mooring line 간섭 때문에 Wire 쓸림, 단선으로 많은 비용이 발생했다. 이를 해결하기 위해 Anchor 설치상태 및 위치를 파악한 결과이다. 그리고 우측그림은 타조선소의 안벽 주변을 조사한 자료이고, 안벽 근처에 2m × 2m × 1.2m 사이즈의 블록을 발견했다. 현장 주변에는 매립을 진행하고 있는 상태였기 때문에 작업장에서 블록이 이동한 것으로 보인다. 블록은 바지선이 계류하는 하는 곳에서 약 4m 지점에 있는 것을 확인했다.
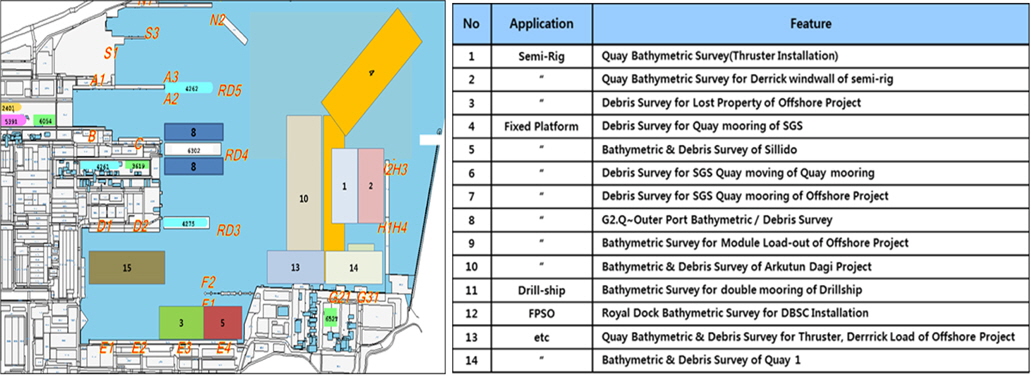
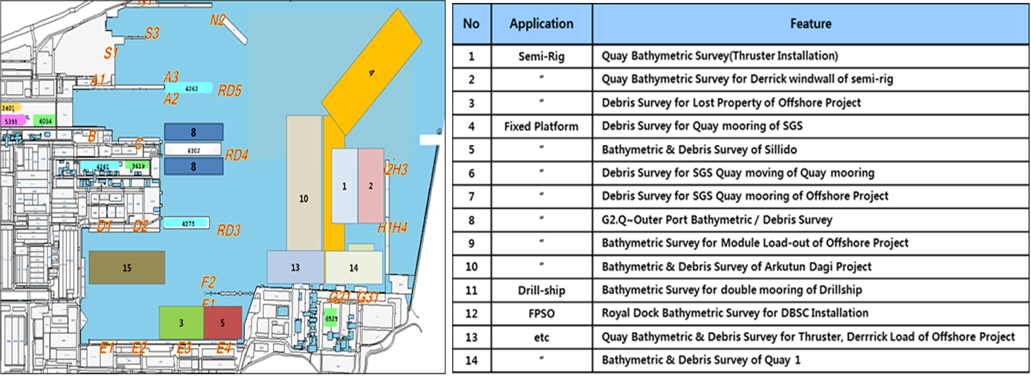
Fig. 15는 야드 Survery 조사 구역과 선종별 적용사례로 분류하여 분석표로 만들었다.
측면주사음탐기를 이용하여 해저지형 및 수심 조사를 실시하고, 관련 보고서를 주문주에게 제출하여, MWS요구사항에 만족시켰다. 하지만 Tug-Boat를 이용한 토우피시 운용에는 많은 어려움이 있다. 야드 내 협소 지역 즉, 좁은 면적과 낮은 수심에서는 조사가 어렵고, 이로 인한 안전사고 발생 가능성이 있다. 또한 4명 이상의 작업자가 투입 되어야 하고, Tug-boat 또는 소형 탐사선을 윤용해야 하는 측면에서 비효율적이라고 할 수 있다. 이러한 문제점들을 해결하기 위해 USV(Unmanned surface vehicle)를 활용한 Underwater survey 무인화의 필요성이 대두되고 있다. 현재 야드 환경에 최적화된 H/W 및 S/W를 개발 중에 있으며, 이는 다양한 해양 작업에 적용될 수 있는 것으로 기대하고 있다.
측면주사음탐기를 사용하여 해저지형 및 Debris들을 영상화하여 판독하고 있지만, 많은 부분에서 관측된 사물의 형태를 정확하게 판독하기는 어려웠다. 더욱 정확한 조사를 위해서는 약 반경 10m 정도의 오차를 두어 다이버가 투입되어야 한다. 만약 해저 지형 공사중의 현장이라고 한다면 다이버의 투입에 있어 안전을 확보하기에는 어려움이 있다. 안전하고 정확한 사물 판독을 위해 실시간으로 모니터링이 가능한 ROV(Remotely operated vehicle)을 같이 사용한다면 효율적일 것으로 판단된다.
현재 조선소에서 대형 선박 및 해양플랜트의 건조를 위해 토우피시를 사용한 곳은 수심이 얕은 보통 (10m~20m) 사이에서 운용이 되었다. 토우피시로 측량 할 수 있는 수심은 한정되어 있으며, 더 깊은 해저지형을 조사하기 위해서는 토우피시의 케이블 길이를 더욱 많이 확보해야 하며, 또한, 양력이 생기지 않도록 다른 부가장치가 필요하다. 케이블의 길이는 한계가 있으므로 다른 형태의 해저지형 탐사 장치를 필요로하게 되었다. 이것이 바로 AUV(Autonomous underwater vehicle)의 시작이라고 할 수 있을 것이다. 다시 정리하자면, 토우피시의 운용상의 비효율성 때문에 USV가 필요로 하게 되었으며, USV의 제한적인 사용 수심과 타 유인선박과의 충돌 위험성 때문에 AUV로 진보하게 되었다.
향후, 해양지형 및 수심 조사 그리고 수중 무인 택배 시스템과 같은 임무를 위해서는 AUV와 같이 고 지능적이고 효율적인 장비들이 개발되어 지속적인 Underwater 환경 상태를 Database화 하여 보유하는 것이 경쟁력을 강화시키는 방법이라고 할 수 있을 것이다.
마지막으로 측면주사음탐기를 사용하여 해저지형 및 수심조사는 선박 및 해양플랜트 건조에 있어서 계속되는 업무 중 하나이며, 효율적인 방법과 안전한 작업을 확보하기 위하여 더 많이 연구하여야 할 것이다.