The paper produced an application that used Doppler radar sensor to prevent bicycle related accidents. Doppler radar sensor detects any approaching object and gives warning to the user through the danger detection algorithm of the application. The danger detection algorithm determines danger by comparing relative speed using the sensed approaching object and Doppler frequency. It also sends SMS to the preset contact to let him/her be informed of the critical situation in which the user lies when an accident happens. The experiment result showed that the algorithm judged danger by detecting the approach status and speed as well as sent out SMS to the set contact under the assumption that there was an accident.
레저란 ‘참가의 주 목적이 의식주 문제의 해결이 아닌, 노동 이외의 자발적인 여가활동’으로 정의된다[1]. 소득수준 상승에 따라 건강에 대한 관심과 레저 활동이 증가한 가운데 자전거가 친환경 교통수단으로 주목받으면서 국내 자전거 시장은 2000년 이후 급격히 확대되었다. 하지만 도로교통공단에 따르면 자전거 교통사고 발생건수는 2010년 1만1259건, 2011년 1만2121건, 2012년 1만2970건으로 매년 증가하는 추세이다[2].
이러한 자전거 사고를 방지하기 위해 헬멧, 장갑 등 안전 장비가 증가하고 있다. LED 램프와 탐지 센서가 장착된 웨어러블 점퍼, 자전거 뒤에 라이트를 부착하여 야간에 자전거 도로를 표시하는 광원이 나오는 레이저라인 라이트, 자전거와 자동차 사이에서 위치 정보를 공유하여 자전거와 자동차가 가까워질 경우 헬멧 진동으로 경고 신호를 보내는 스마트 헬멧 등 다양한 안전장비들이 있다.
본 논문에서는 자전거 사고를 방지하기 위해 알람 서비스를 제공하는 어플리케이션을 구현한다.
구현한 어플리케이션은 도플러 레이더 센서를 이용하여 전방 물체의 접근 상태와 도플러 주파수를 획득한 후 위험 판단 알고리즘을 통해 접근 물체가 위험하다고 판단 될 시 사용자에게 소리 또는 진동으로 경고 알람을 제공한다. 또한, 위급 상황이라 판단될 경우 설정된 연락처로 사용자의 상황을 SMS로 발송한다.
본 논문의 구성으로 Ⅱ장에서는 위험 판단 알고리즘에 대해 설명한다. Ⅲ장에서는 전방 물체 감지 어플리케이션 구성에 대해 설명한다. Ⅳ장에서는 구현한 어플리케이션의 성능을 평가한다. 마지막으로 Ⅴ장에서는 결론을 맺는다.
본 장에서는 도플러 레이더 센서에서 감지한 전방 물체의 접근, 이탈, 정지 상태 정보와 물체의 움직임에 따라 발생하는 도플러 주파수를 이용하여 접근 물체의 위험 유무를 파악하는 위험 판단 알고리즘을 나타낸다.
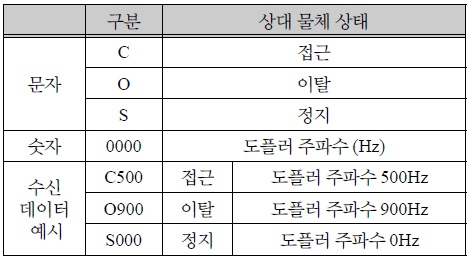
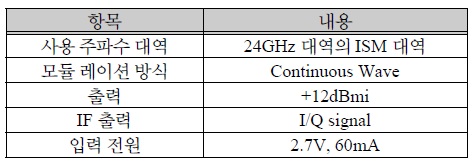
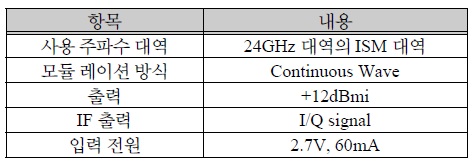
표 1은 도플러 레이더 센서에서 어플리케이션으로 송신하는 데이터 포맷이다.
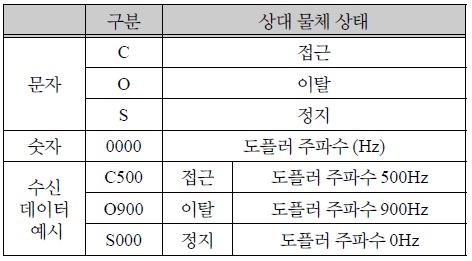
도플러 레이더 센서의 송신 데이터 포맷
도플러 주파수와 식 (1)을 이용하여 전방 물체의 상대 속도

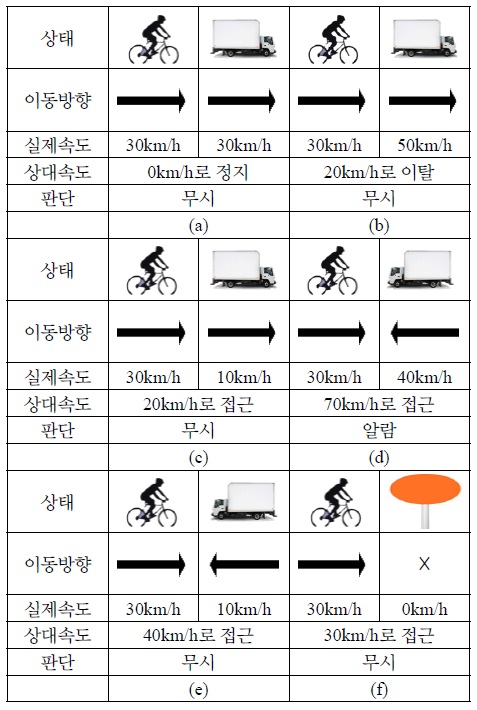
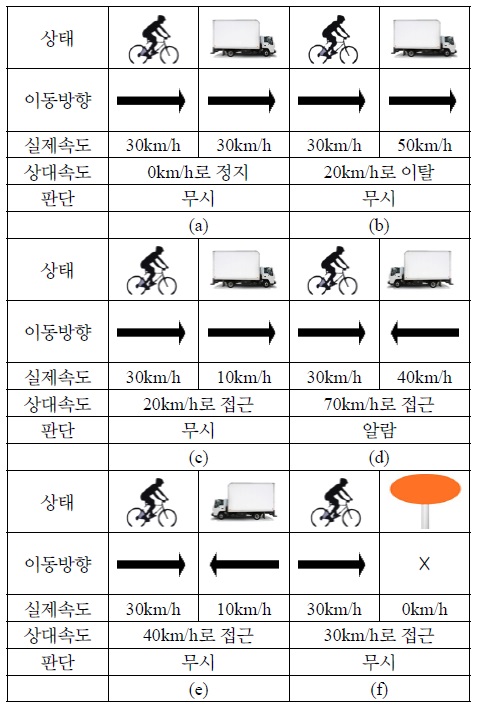
표 2는 전방에서 물체가 접근할 경우 위험 유무를 판단하는 기준이다. (a)는 사용자와 같은 속도, 방향으로 주행하기 때문에 정지 상태로 인식하여 안전하다는 판단을 한다. (b)는 사용자와 같은 방향이지만 더 빠른 속도로 주행하기 때문에 이탈로 인식하여 안전하다는 판단을 한다. (c)는 사용자와 같은 방향으로 주행하고 느린 속도로 주행하기 때문에 접근으로 인식하지만 사용자가 회피할 수 있으므로 안전하다는 판단을 한다. (d)는 사용자와 반대 방향으로 주행하고 사용자보다 더 빠른 속도로 주행하기 때문에 사용자가 회피하기 어려우므로 위험하다는 판단을 한다. (e)는 사용자와 반대 방향으로 주행하고 사용자보다 느린 속도로 주행하기 때문에 접근이라 인식은 하지만 회피할 수 있으므로 안전하다는 판단을 한다. (f)는 가로수나 전봇대와 같은 정지된 물체이므로 접근이라 인식하지만 안전하다는 판단을 한다.
[표 2.] 상대 속도를 이용한 상대 물체의 위험 유무 판단
상대 속도를 이용한 상대 물체의 위험 유무 판단
전방 및 후방 물체 감지 알고리즘은 접근하는 물체의 접근 상태 및 상대 속도를 이용하여 위험한지를 판단한다. 접근 상태가 이탈 혹은 정지 상태라면 사용자에게 위험을 가할 수 없는 상황이라 판단하며, 접근 중일 때는 사용자보다 상대 속도가 빠를 경우 위험하다는 판단을 내릴 수 있다.
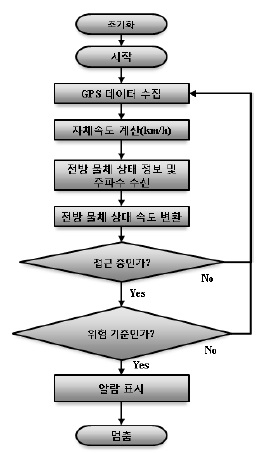
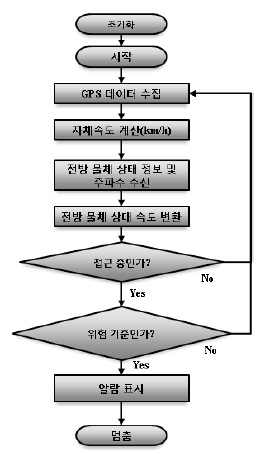
그림 1은 전방 물체 감지 알고리즘의 흐름도이다. 어플리케이션을 작동한 후 주행을 시작하면 어플리케이션은 GPS 데이터 수집을 시작하고 이들을 이용하여 사용자의 이동 속도를 측정한다. 도플러 레이더 센서에서 전방의 물체가 감지되면 블루투스 통신을 통해 전방 물체의 상태 정보 및 도플러 주파수를 수신한다. 식 (1)을 이용하여 도플러 주파수
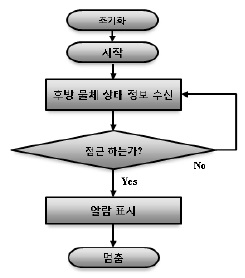
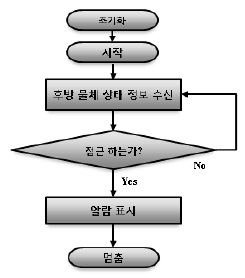
그림 2는 후방 물체 감지 알고리즘의 흐름도이다. 후방에서 접근하는 물체의 상태를 판단하여 이탈 혹은 정지라면 안전하다는 판단으로 무시하게 되고, 접근 상태라면 사용자에게 알람을 표시한다. 전방 물체 감지와는 달리 접근 상태만을 고려하기 때문에 GPS 데이터를 사용하지 않는다.
위험 물체가 접근하여 사용자에게 사고가 발생할 경우 설정된 연락처에 사용자의 사고 발생 정보를 전달할 필요가 있다. 하지만 단순히 전방 및 후방 물체 감지 알고리즘을 통해 위험을 판단하여 SMS를 발송한다면 다수의 SMS를 발송하게 되므로 사고 발생 판단을 명확하게 할 필요가 있다.
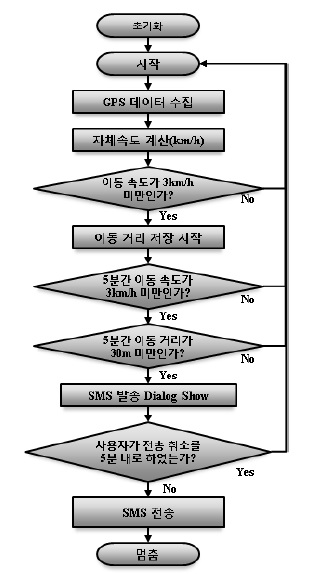
그림 3은 위급 상황 발생 시 사용자가 설정해 놓은 연락처로 위급 상황 발생 정보를 전달하는 알고리즘의 흐름도이다. 사용자가 이동 후 이동 속도가 3km/h 미만으로 낮춰질 경우 이동 거리 누적을 시작한다. 만약 5분간 이동 속도가 3km/h 미만으로 유지되고 이동 거리가 30m 미만이라면 사고가 발생하여 사용자가 이동 불능상태라 판별한다. 그 후 SMS 발송 여부를 묻는 dialog 알람을 띄어 사용자가 이동 불능 상태인지 다른 이유로 현재 장소에 머무르고 있는지를 재차 확인한다. 만약 SMS 발송 여부 dialog 알람이 띄어진 후 5분간 사용자가 SMS 발송을 취소하지 않는다면 사고 발생으로 재판단하여 설정된 연락처들로 SMS를 발송한다.
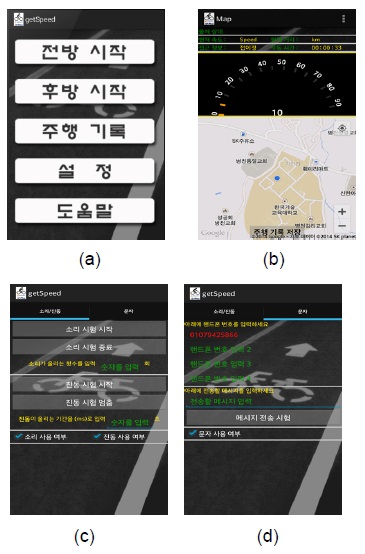
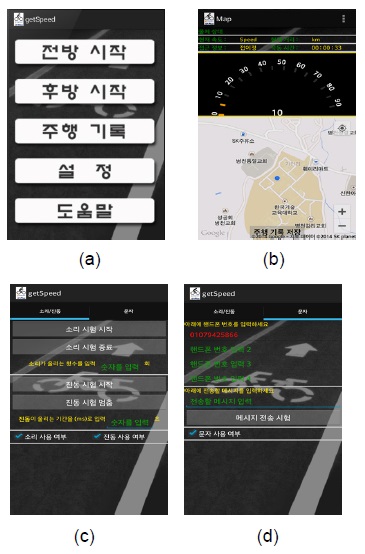
그림 5는 도플러 센서 신호처리 보드를 이용한 전방물체 감지 자전거 어플리케이션의 화면이다. 사용자의 이동 속도, 현재 거리, 접근 정보, 작동 시간, 이전 주행기록 등을 확인할 수 있으며, 소리 및 진동 및 문자 알람을 설정할 수 있다. Google Map Android API v2를 사용하였으며, 내부 DB로는 android DB의 표준인 SQLite를 사용하여 구현하였다[5,6].
본 장에서는 본 논문에서 구현한 어플리케이션이 위험 판단 알고리즘에 의해 전방 물체가 위험 판단을 정상적으로 내리는지와 위급 상황이라 판단 됐을 때 SMS 발송이 정상적으로 이루어지는지를 평가하였다.
위험 판단 알고리즘의 성능을 평가하기 위해서는 사용자의 속도, 전방 물체의 접근 상태 및 상대 속도가 필요하다. 여기서는 도플러 레이더 센서를 고정시킨 후 실험하였기 때문에 사용자의 속도는 0km/h이다.
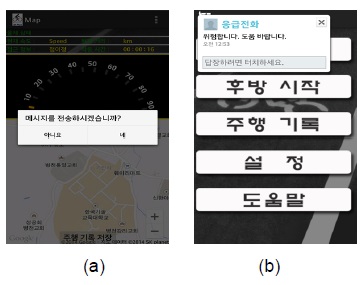
그림 6은 전방 물체의 접근 상태와 상대 속도를 획득하여 위험 판단을 평가하는 것이다. (a)는 전방 물체가 이탈 중인 경우로써, 접근 중이 아니므로 ‘안전 합니다’ 라는 문자를 표기하고 있다. (b)는 전방 물체가 접근 중인 경우로써, 접근 상태를 만족한다. 또한, 전방 물체의 ‘위험 합니다’라는 문자를 표기하고 있다. 그림 7은 위급상황 시 설정된 연락처로 SMS 발송이 정상적으로 이루어지는지를 확인하였다. 그림 6의 (a)는 이동 중 정지한 후 5분 후에 dialog가 띄어진 화면이며, (b)는 dialog가 띄어진 후 아무런 동작을 취하지 않았을 때 5분 후에 설정된 연락처로 SMS가 발송된 화면이다.
본 논문에서는 자전거 사고를 방지하기 위해 자전거 안전 장비로 스마트 폰에서 전방 물체를 감지할 수 있도록 도플러 레이더 센서를 이용하여 접근하는 감지한 후 위험 판단 알고리즘을 통해 사용자에게 경고 알람서비스를 제공하는 어플리케이션을 구현하였다. 도플러 레이더 센서에서 감지한 전방 물체의 접근 상태 및 도플러 주파수를 어플리케이션으로 블루투스 통신을 통해 전송하고 이러한 정보를 상대 속도로 변환하여 사용자의 이동 속도와 비교한 후 위험 상황을 판단한다. 또한 사고가 발생하여 이동 불능인 경우 사전에 설정된 연락처로 SMS를 발송하여 사용자의 위급 상황을 전달한다. 실험 결과 정상적으로 접근 상태와 속도를 파악하여 사용자에게 위험 경고를 제공했으며, 사고 발생이라 가정했을 시 미리 설정된 연락처로 SMS 발송하는 것을 확인할 수 있었다. 향후 연구과제로는 전방 및 후방뿐만 아니라 측면에 대한 위험 여부를 판단할 필요가 있으며, 또한 정확한 판단을 위해 타 센서들을 추가적으로 활용하여 연구할 필요가 있다.