An estimation problem in the environment which GPS signals do not reach, should be solved by employing an indoor location estimation scheme. Location estimation schemes for indoor environments generally include the AOA, TOA, RSS, Fingerprint, and TDOA. For a ship environment where there exist many spaces enclosed by iron plates, the TDOA scheme is appropriate because location estimation is usually performed at a closed range. In this paper, we address the problem of estimating the location of a terminal under the ship environment. The problem of location estimation by using the TDOA is presented in detail, and then an algorithm for applying the estimation to the ship environment is proposed. Finally, the proposed algorithm of location estimation in a ship by the TDOA scheme is verified through simulations from three viewpoints.
GPS(Global Positioning System) 신호가 도달하지 않는 환경에서 위치를 추정하는 문제는 지금까지 많은 연구가 이루어져 왔다[1-4]. 일반적으로 실내 환경에서 위치 추정은 여러개의 AP(Access Point)를 직교 배열로 배치하여 위치를 찾고자 하는 단말기의 신호를 이용하여 이루어진다. 이러한 방법은 크게 AOA(Angle of Arrival), TOA(Time of Arrival), RSS(Received Signal Strength), Fingerprint, TDOA(Time Difference of Arrival) 방식이 있다. 먼저 AOA 기법은 두 개 이상의 AP를 써서 AP로부터 단말기로 오는 신호의 방향
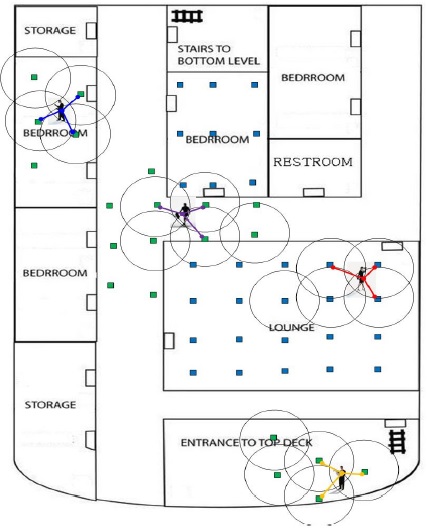
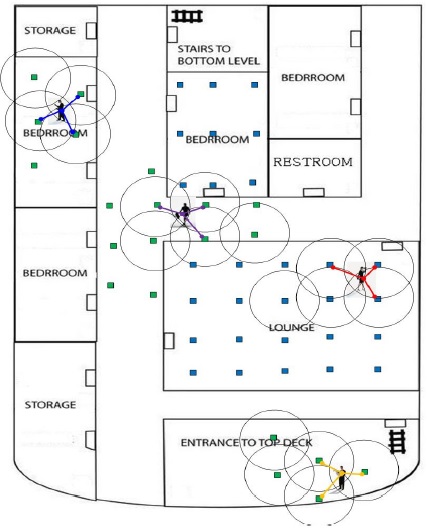
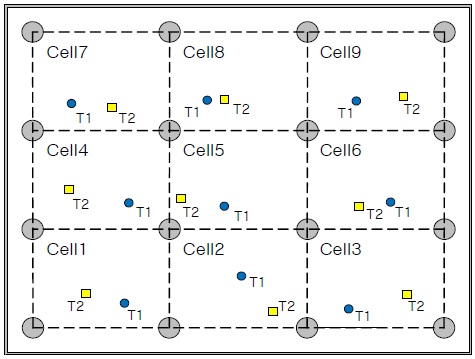
본 논문에서는 [13]와 다르게 TDOA기법에 의한 위치 추정을 다룬다. 선박의 실내 환경에서 단말기의 위치 추정 문제를 생각해보자. 일반적으로 선박은 여러개의 층으로 건조되어 있고 각 층은 두꺼운 철판으로 막혀있는 공간이 상대적으로 많다는 특징을 갖고 있다. 그림 1은 선박의 한 개 층에 대한 평면도를 보여주고 있는데 이러한 환경에서 위치를 추정하는 방법의 예를 보여주고 있다. 이 환경에서 단말기의 위치 추정은 매우 어려운 문제로 생각할 수 있다. 실제로는 각 층마다 평면상의 추정이 아닌 공간상의 추정 문제로 접근해야 한다. 그러나 공간상의 추정문제는 상대적으로 많은 계산량을 필요로 하기 때문에 평면상의 추정문제로 접근하는 것이 타당하다. 이는 선박내에서 단말기의 위치에 대한 의미가 정확히 어느 지점에 있는가가 아니라 어느 공간에 있는가가 중요하기 때문이다. 즉, 정확한 위치를 추정하기 보다는 어떤 단말이 몇 층의 어느 실에 있는가를 판별하는 것이 중요하기 때문이다.
따라서, 본 논문에서는 GPS 신호가 도달하지 않는 선박내 공간에서 2차원 상의 위치 추정 문제를 다룬다. 이를 위해 먼저 TDOA 기법에 의한 위치 추정 방법에 대해 심도있게 살펴보고, 다음으로 선박의 환경에서 TDOA 기법을 적용 가능하도록 알고리즘을 제안한다. 마지막으로 세가지 관점에서 모의실험을 수행하여 선박의 실내 환경에서 TDOA기법에 의한 위치 추정의 타당성을 검증한다.
ISO/IEC JTC FDIS 24720 규격에 적용된 TDOA 위치 추정 방식은 단말기가 임의의 위치에 있을 때, 세 개 이상의 AP를 써서 단말기로부터 각 AP로 들어오는 신호의 도달시간을 측정하여 상호간 시간차를 구해 위치를 추정하는 방법이다. 위치 추정은 두 단계 과정으로 이루어지는데 첫 번째는 Estimation Process이고 두 번째는 Detection Process이다. Estimation Process는 세 개의 AP 중에서 임의의 하나를 기준으로 잡고 다른 두개의 AP와의 시간차를 알아냄으로서 단말기의 위치 추정값 를 구하는 것이다. 이는 미지수
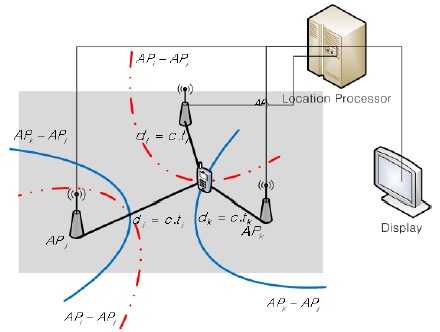
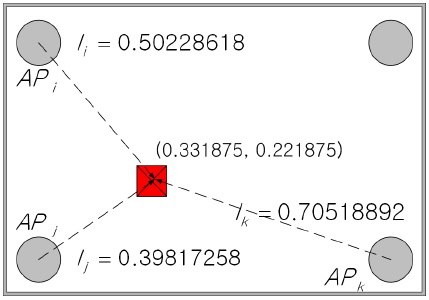
그러면 그림 2와 같이 단말기와 세 개의 AP가 동일한 평면상에 있을 때 단말기의 위치를 추정하는 문제를 생각해보자.
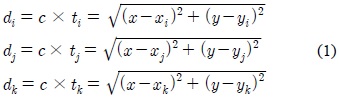
단말기가 (
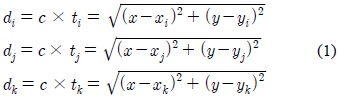
여기서
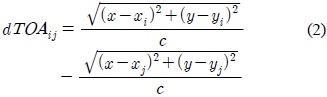
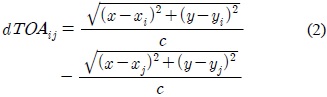
그러면 단말기에서
식 (4)의 양변을 제곱하여 추정하고자 하는 값인
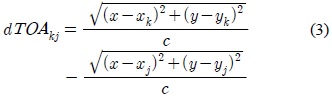
또한, 단말기에서
그러면 식 (6)의 양변을 제곱하여
여기서 (5)의 좌변을 보다 간결하게 표현하기 위해 로 하면, (5)는 (8)과 같이 되고,

또한, 로 하여 (7)의 좌변을 정리하면 (9)와 같이 된다.

식 (8)과 (9)를 자세히 보면
그러면 (10)을 자세히 관찰해 보자. 이는 추정하고자 하는 두 개의 값인

여기서, m과 b는 (12)와 같다.


이제 1차방정식 (11)를 이용하여 연립방정식 (8)과 (9)의 해를 구해보자. (11)을 (8)과 (9)에 각각 대입하여 두 식을 정리하면 (13)와 같은

여기서


그러면 단말기의 위치 (
지금까지의 과정을 다시 한번 요약하면, 평면상에서 단말기가 있는 임의의 위치 (
2.2. 선박의 환경에서 TDOA 기반 위치 추정 알고리즘
1절에서 세 개의 AP를 써서 TDOA 기법에 의한 평면상의 위치 (
선박은 그림 3과 같이 건조시부터 여러개의 층으로 구성되어 있기 때문에 각 층에서 단말기의 위치 추정은 그 층의 바닥이나 천정의 높이를 기준으로 추정문제를 다루는 것이 타당하다. 즉, 그림 3과 같이 여러개의 AP가 설치되어 있는 평면상의 추정문제로 생각해도 타당하다고 볼 수 있다.
따라서, 선박의 실내 환경에서 단말기가 있는 위치를 추정하기 위한 알고리즘은 표 1과 같이 제안할 수 있다. 즉, Estimation Process에서는 단말기가 어느 층에 있는지를 결정하고 그 다음에 TDOA 기법을 써서 평면상의 위치를 추정하는 문제로 이루어진다. 또한, Detection Process는 두 개의 추정값 중 구해야할 추정값을 결정하는 것으로 이루어진다.
[표 1.] Estimation and Detection 과정
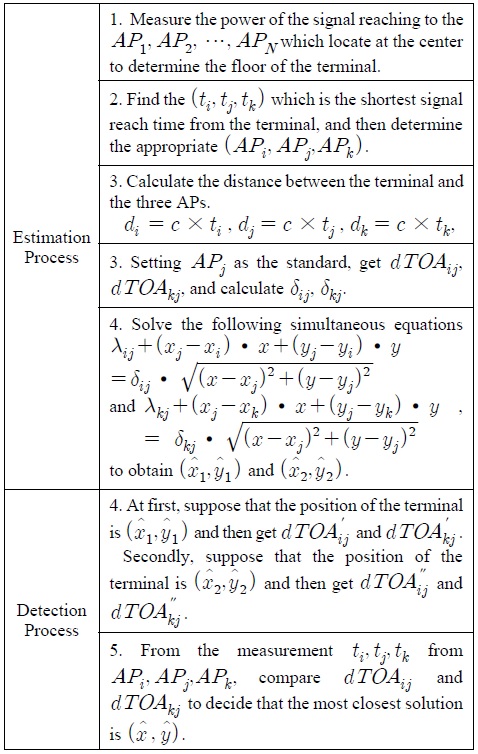
Estimation and Detection 과정
선박의 실내 환경에서 TDOA를 적용한 위치 추정문제의 타당성을 검증하기 위해 세가지 관점에서 모의실험을 하였다. Example 1에서 단말기로부터 오는 신호의 전파시간를 측정하여, 측정된 값으로부터 거리를 환산하는 실험을 하였고, Example 2에서는 한 개의 단말기와 네 개의 AP를 써서 단말기의 위치 (
[Example1]
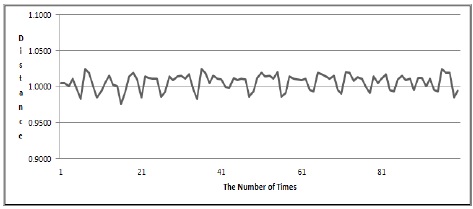
단말기로부터 AP까지의 거리를 1m, 3m로 두고 두 경우에 대해 신호의 전파시간을 측정하여 이를 거리로 환산하는 실험을 하였다. 먼저 1m 떨어진 경우에 단말기로부터 신호를 100회를 송신하여 각각의 전파시간
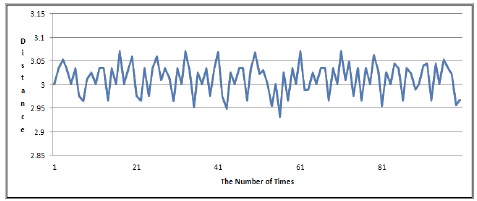
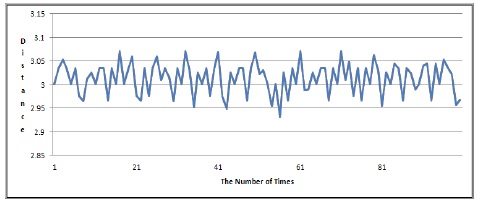
또한, 단말기와 AP간의 거리가 3m 떨어진 경우에 대해서도 100회의 실험을 하였는데 그림 5는
두 경우에 대한 실험을 통해 알 수 있었던 것은 거리가 길어질수록 거리 오차가 조금 더 커짐을 발견할 수 있었다.
[Example2]
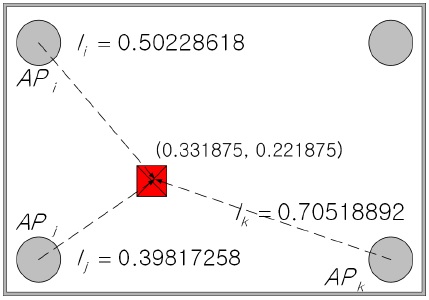
TDOA에 의한 평면상의 위치 추정 문제를 알아보기 위해 그림 6과 같이 한개의 단말기와 세개의 AP를 써서 단말의 위치 (
[Example3]
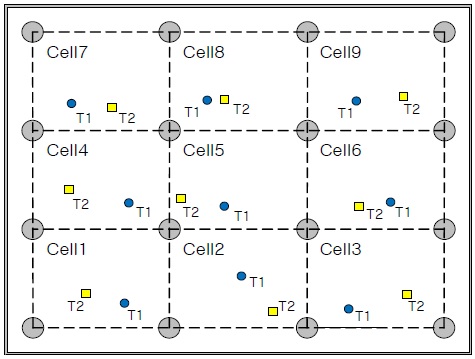
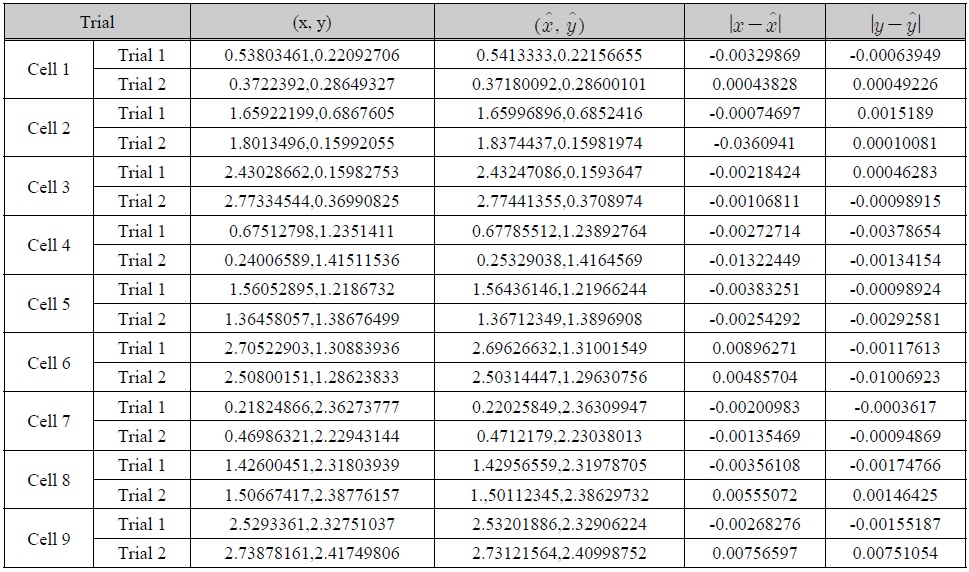
선박의 실내 환경에서 단말기가 위치하고 있는 층의 AP 배치 상태는 그림 7과 같다고 보자. 즉, 16개의 AP가 직교 배열로 설치되어 있는 상황에서 9개의 셀이 나온다. 각 셀에서 2회의 추정 실험을 하였는데 표 2는 그에 대한 추정결과를 보여준다.
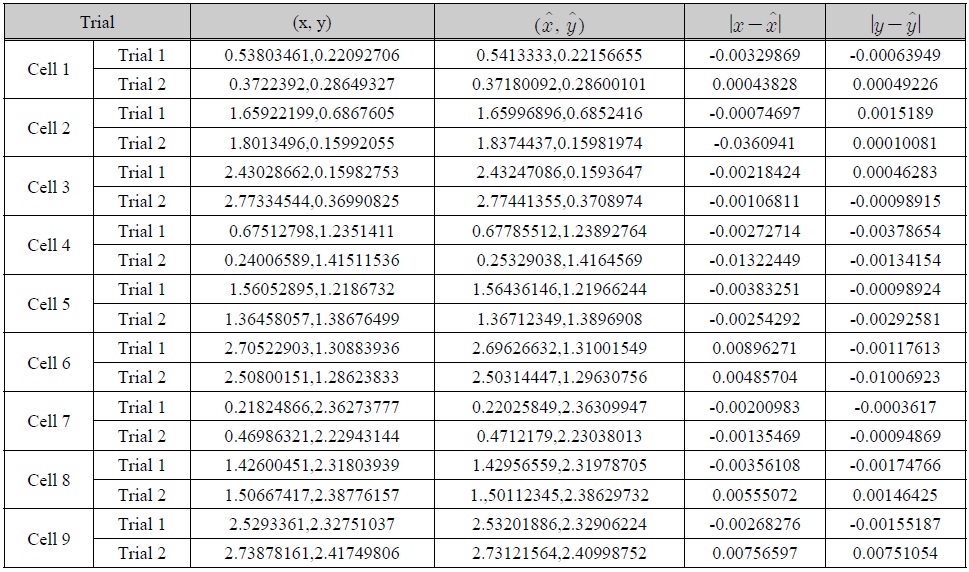
18번의 위치 추정에 대한 측정값과 오차
18회의 모의실험을 통해 결과를 분석해보면,
본 논문에서는 여러개의 층으로 구성되어 있는 선박의 실내 환경에서 TDOA기법을 적용하여 위치를 추정하는 문제를 다루었다. 먼저 단말기가 있는 층을 결정하는 방법으로는 선박의 중앙 부위에 별도의 AP을 층마다 두고 단말에서 AP로 들어오는 신호의 강도를 비교하여 단말기가 있는 층을 결정하는 방법을 생각하였다. 다음으로는 단말기가 있는 층에서 단말기의 위치를 TDOA 기법을 써서 추정 문제를 다루었다. Example 1에서 단말기로부터 AP로의 전파시간을 측정하여 단말기와 AP간의 거리를 구하는 실험을 1m, 3m인 환경에서 모의실험 하였다. 1m, 3m 경우에 대해 100회의 실험을 수행한 결과 측정 오차는 거리가 커짐에 따라 좀 더 크게 나타남을 알았다. 그러나 각각의 실험에 대해 기대값과 분산을 구해서 분석한 결과 전파시간 측정에 의해 거리를 환산하는 방법이 타당성이 있다는 사실을 알게 되었다. 다음으로 Example 2에서는 네 개의 AP를 써서 단말기로부터 오는 신호의 전파시간이 가장 짧은 세 개의 AP를 선택하고 선택된 세 개의 AP를 써서 단말기의 위치 (
마지막으로 Example 3에서는 16개의 AP가 설치되어 있는 공간에서 각 셀에서 2번씩 모의실험을 하여 추정오차를 구해보았다. 18번의 실험을 수행한 결과 위치 추정 오차가 상당히 작음을 알 수 있었다. 본 연구는 선박이라는 환경에서 각 층의 위치 추정을 평면상의 추정 문제로 가정하고 다루었는데 실제로 선박의 각 층은 공간적 접근을 해야 한다. 따라서 향후 연구는 3차원 공간에서 위치 추정에 관한 문제를 다루어져야 한다고 생각한다.