Edge Detection is a technique that obtains the particular information of the image using the brightness variation of pixel values and utilized for preprocessing in various image processing sectors. The conventional edge detection methods such as Sobel, Prewitt and Roberts are processed by applying the same weighted value to the entire pixels regardless of pixel distrbution and provides somewhat insufficient edge detection results. therefore, this paper has proposed an edge detection method considering the direction and magnitute of pixels by applying a modified directional mask.
영상에서 에지는 서로 다른 그레이 레벨을 갖는 영역 사이의 경계를 나타내며, 물체와 배경 및 물체와 또 다른 대상 사이에서 주로 발생한다[1-3]. 에지검출은 영상처리 과정에서 중요한 전처리 단계에서 중요한 연구 분야이며, 영상 분할, 인식, 차선 인식, 문자 인식 등에서 영상을 간략화하기 위한 기술 중에 하나이다.
기존의 에지검출 방법은 수직 및 수평 방향의 마스크를 적용하는 Sobel, Prewitt 그리고 서로 다른 대각선 방향의 마스크를 적용하는 Roberts 방법 등이 있다[4-6]. 이러한 방법들은 연산자가 간단하며 기울기 변화가 큰 지점의 에지 검출은 쉽게 할 수 있으나, 영상의 전체 영역에 화소 분포 등에 관계없이 동일한 마스크를 적용하므로 처리결과가 다소 미흡함을 나타낸다[7-9].
따라서 본 논문은 기존의 방법들의 이러한 단점을 보완하기 위하여 화소 크기의 분포 및 위치를 고려한 변형된 방향성 마스크를 적용하여 영상의 에지를 검출 하는 알고리즘을 제안하였다. 그리고 제안한 알고리즘의 성능을 확인하기 위하여, 시각적 영상 및 프로파일을 이용하여 기존의 방법과 제안한 알고리즘을 비교하였다.
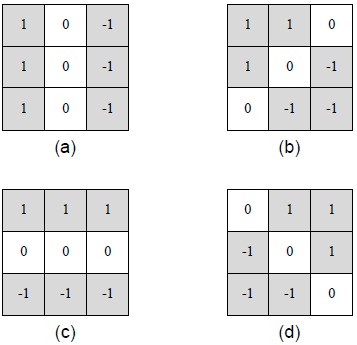
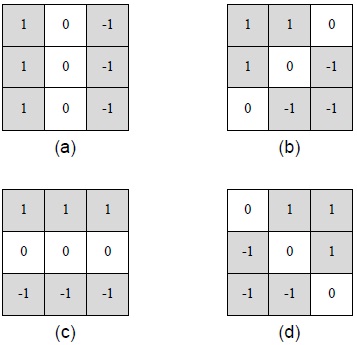
제안한 방법은 화소 크기의 분포에 따른 가중치와 방향성 마스크를 적용하여 에지를 검출한다. 화소 크기의 분포는 입력 영상 마스크에서 화소에 대한 특징 정보를 포함하고 있으며, 마스크 내의 화소들에 대한 평균과 표준 편차를 적용한 가중치를 구하고, 또한 방향성 마스크는 0°, 45°, 90°, 135°에 따른 마스크를 설정하였다. 최종 에지는 화소 크기의 분포에 따른 가중치에 방향성 마스크를 적용하여 최종 가중치 마스크들 을 구성하고, 이 마스크들의 기울기를 적용하여 검출하도록 하였다.
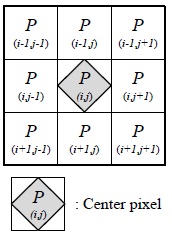
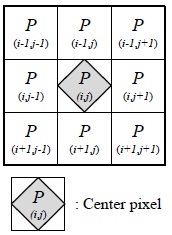
화소 크기의 분포에 따른 가중치를 구하기 위해서 먼저 입력 영상 마스크를 사용하며, 그림 1과 같다.
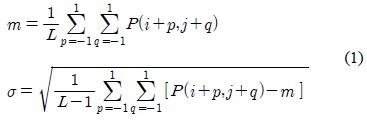
그림 1에서 마스크 요소들의 평균 및 표준편차는 식 (1)과 같이 구한다.
여기서
에지를 효과적으로 구하기 위하여, 먼저 식 (2)와 같 이 파라미터를 설정한다.

여기서
마스크에 적용하는 가중치는 식 (2)에서 구한 파라미터를 이용하여 구하며, 식 (3)과 같다.

표준편차에 대한 스케일 상수에 따라 평균에 대한 파라미터가 변하며, 스케일 상수에 표준편차를 곱한 값이 평균에 가까워질수록 마스크에 적용되는 가중치는 1에 가까운 값을 갖는다.
방향성 마스크는 에지 방향 중에서 0°, 45°, 90°, 135° 에 따라 각각
제안한 방법에서 에지 검출은 화소 크기 분포에 따른 가중치를 방향성 마스크에 적용한 가중치 마스크로 구하며, 식 (4)와 같다.

여기서
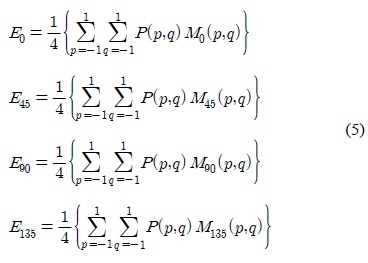
각 방향에 대한 에지 기울기는 원 영상에 가중치 마스크를 적용하여 구하며, 식 (5)와 같다.
최종 에지 결과는 식 (5)로부터 식 (6)과 같이 구한다.

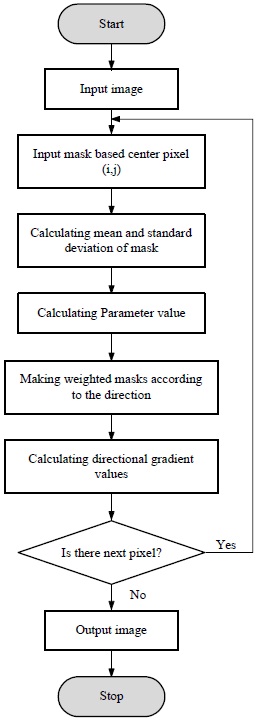
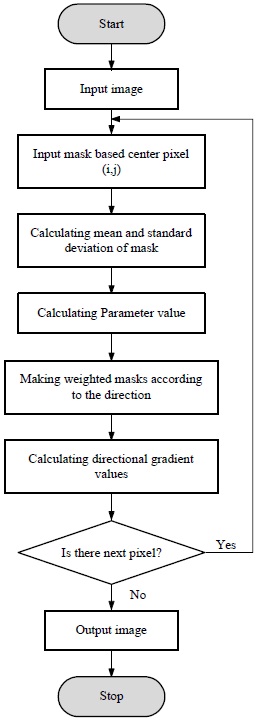
제안한 알고리즘의 흐름도는 그림 3과 같이 나타내었다.
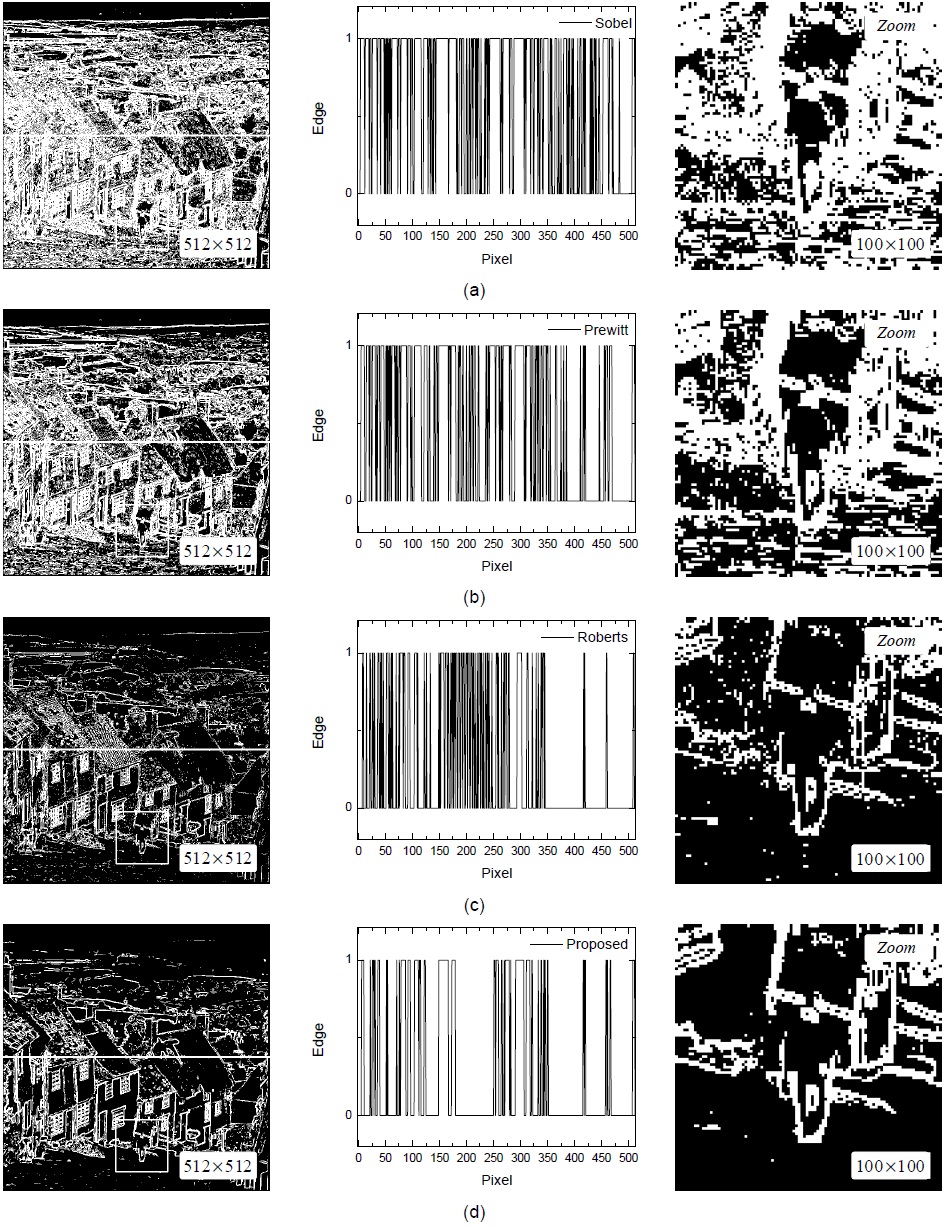
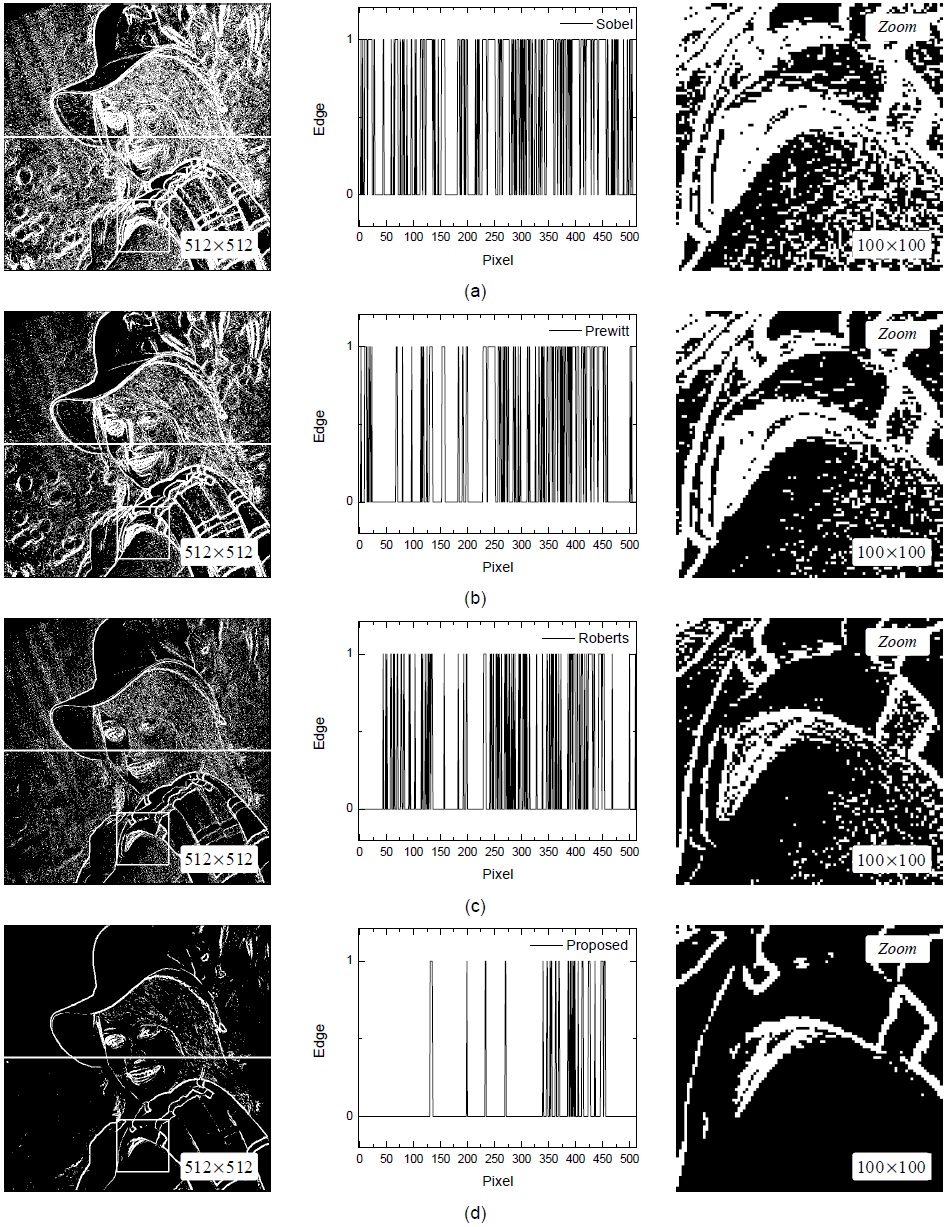
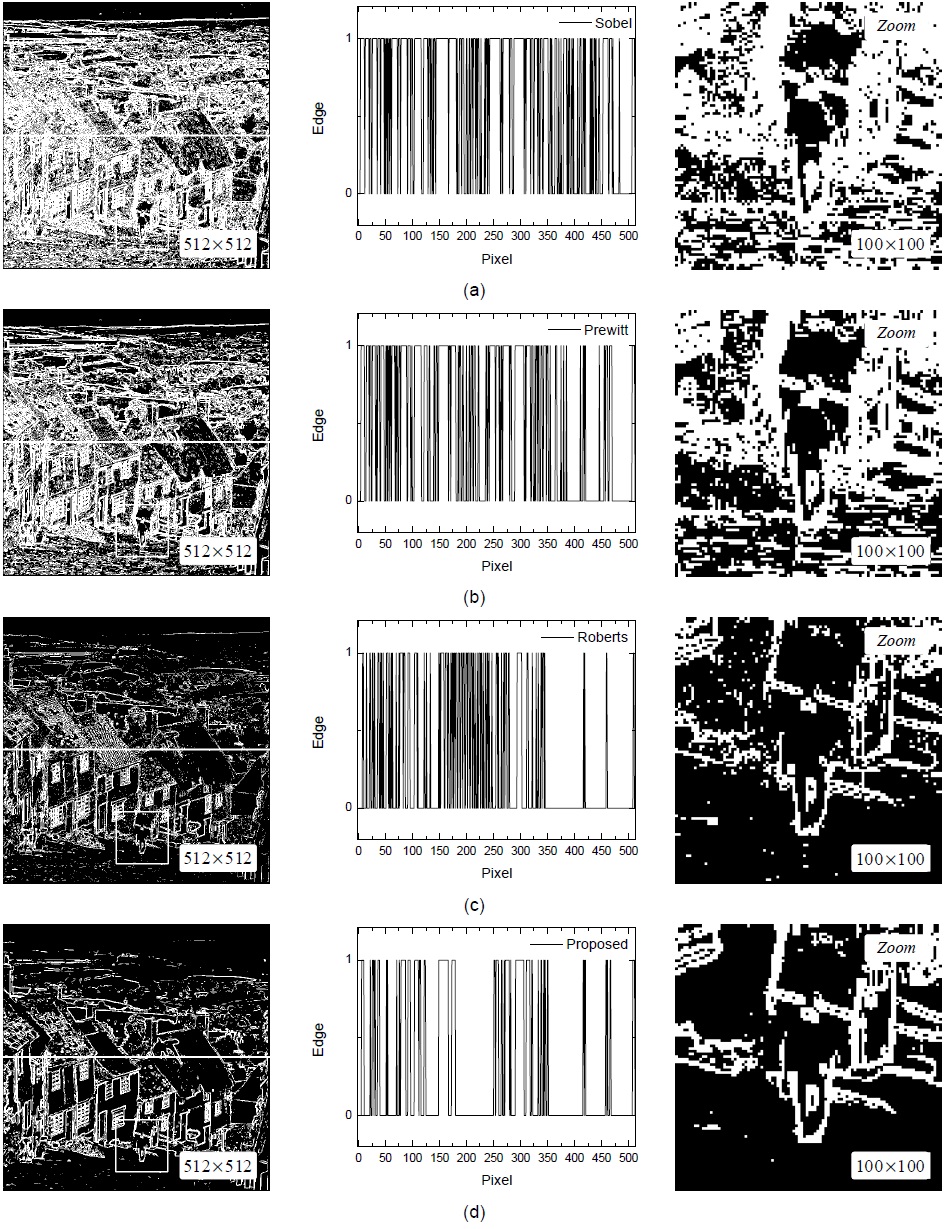
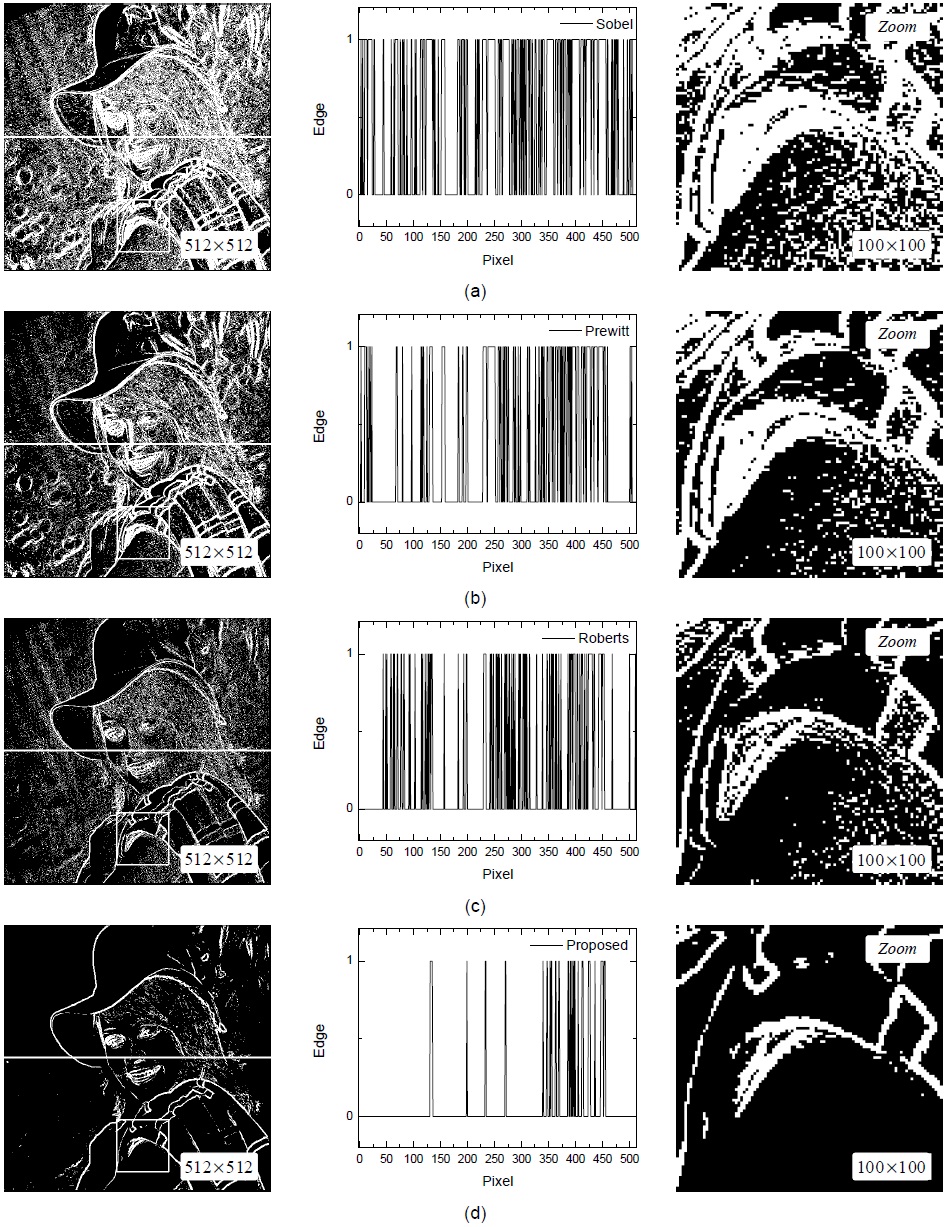
제안한 알고리즘의 에지검출 성능을 확인하기 위하여, 512×512 크기의 8비트 그레이 영상인 Goldhill 및 Girl을 사용하여 기존의 소벨, 프리윗, 로버츠 에지 검출 방법들과 각각 성능을 비교하였다.
그림 4와 5는 시험 영상들을 기존의 에지검출 방법들과 제안한 알고리즘으로 시뮬레이션 한 결과를 나타낸 것이며, (a)는 Sobel 방법이고, (b)는 Prewitt 방법이며, (c)는 Roberts 방법, (d)는 제안한 알고리즘(
그리고 제안한 알고리즘의 에지 검출의 에지 검출 특성을 확인하기 위해, Goldhill 영상 256라인과 Girl 영상 256라인의 프로파일을 나타내었으며, 또한 Goldhill(265,425)화소, Girl (265,425)화소를 중심으로 상하좌우 각각 50화소 영역을 확대한 영상을 나타내었다.
처리 영상 및 프로파일 결과에서 기존의 소벨 방법과 프리윗 방법은 에지를 검출함에 있어서 그레이 레벨이 작게 변하는 에지 및 급격히 변하는 에지에서 우수한 검출 특성을 나타내었지만 불필요한 에지도 포함되어 다소 미흡하였다. 그리고 로버츠 방법은 Goldhill 영상에서는 우수한 에지 검출 특성 나타내었고 Girl 영상에서는 일부 불필요한 에지 성분을 검출하여 다소 미흡한 결과를 나타내었다. 한편 제안한 알고리즘은 불필요한 에지를 제거하여 우수한 에지 검출 특성을 나타내었다.
또한 확대한 영상에서, 소벨 방법과 프리윗 방법으로 처리한 영상은 불필요한 에지 성분이 부각되는 현상을 나타내었고, 로버츠 방법으로 처리한 영상은 일부에서 에지 검출오류를 나타내었다. 그리고 제안한 알고리즘으로 처리한 영상은 기존의 방법에 비하여 불필요한 에지를 제거하여 우수한 에지 검출 결과를 나타내었다.
본 논문은 기존의 에지검출 방법들의 단점을 개선하기 위하여, 화소 크기의 분포에 따른 가중치와 방향성 마스크를 적용하여 에지검출 알고리즘을 제안하였다. 그리고 제안한 알고리즘의 성능을 확인하기 위하여, 처리 영상 및 프로파일을 이용하여 기존의 방법과 제안한 알고리즘을 비교하였다.
시뮬레이션 결과, 소벨 방법과 프리윗 방법은 우수한 에지 검출 특성을 나타내었지만 불필요한 에지 성분이 부각되어 다소 미흡한 결과를 나타내었고, 로버츠 방법은 영상의 일부에서 미흡한 에지 검출 결과를 나타내었다. 그러나 제안한 알고리즘은 불필요한 에지 성분을 제거하여 영상의 전 영역에서 우수한 에지 검출 특성을 나타내었다.
따라서 제안한 알고리즘은 향후, 물체 인식, 문자 인식, 차선 검출, 얼굴 인식 등 여러 에지검출 응용분야에 적용되리라 사료된다.