Recently, device-to-device (D2D) communication has been considered as key technology for future cellular system, because it can solve the problem of excessive data traffic increment and can also provide new communication services. Herein, we propose new neighbor discovery for D2D communication and examine its performance. Our proposed scheme is proximity beacon based discovery in which wireless resource for pilot transmission is assigned based on the spatial correlation of wireless channel and sensing period is adjusted according to target accuracy such that power consumption can be reduced. The performance of our propose scheme is analyzed mathematically and verified through computer simulations.
현재 모바일 시스템이 직면하고 있는 가장 큰 문제는 스마트폰의 보급에 따른 트래픽 양의 기하급수적 증가이다[1,2]. 미국 시스코사의 리포트에 따르면 모바일 시스템에서의 트래픽 양이 매년 60%이상 증가할 것으로 예측된다. 따라서 이러한 트래픽 증가를 효율적으로 대처할 수 있는 방안이 필요하고 이와 관련하여 현재 많은 연구가 이루어지고 있다[1,2].
그중에서 모바일 사용자들이 기지국을 거치지 않고 직접 통신을 통해 데이터를 주고받는 단말-대-단말(D2D) 통신기술이 최근 많은 관심을 받고 있고 이와 관련하여 많은 연구가 현재 이루어지고 있다. 모바일 사용자들이 같은 데이터를 요구하는 경우가 많고 서로 데이터를 주고받는 경우가 많으므로 D2D통신을 통해 추가적인 대역 할당 없이 전체 시스템의 수율을 향상시킬 수 있다(data offloading).
특히 D2D통신은 모바일 시스템의 수율을 향상시켜 줄 뿐만이 아니라 주변에 있는 사용자들을 탐색을 가능하게 하고 이를 이용하여 모바일 사용자들에게 새로운 서비스 (e.g., 소셜 네트워크 서비스)를 제공할 수 있다. 이러한 이유로 많은 통신 서비스 업체들의 D2D 기술에 대한 관심이 높아지고 있다. 미국 퀄컴의 경우 자신들이 개발한 FlashlinQ의 D2D 단말탐색 기술을 기반으로 LTE-Direct 단말을 개발을 마쳤고, 다양한 사업자와 서비스를 준비 중에 있다[3].
D2D 통신의 핵심기술로서 주변단말을 탐색하는 단말탐색 방안과 단말간 직접통신을 위한 자원할당기술을 꼽을 수 있다[4]. 본 연구에서는 단말탐색방안에 대해서 다루고자 한다. D2D 통신을 위한 단말탐색 방안으로써 모바일 사용자들이 자신의 위치정보를 이용하여 주변 단말을 탐색하는 위치기반 단말탐색방안과 단말탐색을 위해 특별히 디자인된 단말탐색 파일럿의 송수신을 통해서 단말을 탐색하는 프록시미티 비콘기반 단말탐색방안이 있다. 본 연구에서는 프록시미티 비콘기반 단말탐색방안을 고려하였다. D2D 통신을 위한 프록시미티 비콘기반 단말탐색방안의 대표적인 기술로 미국 퀄컴사에서 제안한 FlashLinQ기술이 있다[5]. FlashLinQ 기술에서는 전체 D2D 통신을 위한 주파수 대역 및 타임슬롯 중 일부를 D2D 파일럿 송수신에 할당한다.
각 단말들은 자신이 존재를 알리는 파일럿을 브로드캐스팅 하고 주변 단말들이 이 파일럿을 수신함으로써 자신의 주변에 있는 단말들을 탐지할 수 있다. 현재 제안되어 있는 프록시미티 비콘기반 단말탐색방안들은 대부분 FlashLinQ 기술에 기반을 두고 있다.
기존의 FlashLinQ 기술에서는 자신이 어떠한 자원을 이용하여 파일럿을 전송할지 기지국이 랜덤하게 정하게 된다. 하지만 파일럿 전송을 위한 자원할당을 효율적으로 함으로써 단말탐색의 효율성을 높일 수 있다. 이를 위해 본 연구에서는 무선채널에 공간적 연관성[6]을 이용하였다. 즉 비슷한 위치에 있는 단말은 비슷한 무선채널 상황을 가지게 될 것이고, 이를 이용하여 비슷한 위치에 있는 단말들이 비슷한 주파수대역 및 타임슬롯을 이용하여 파일럿을 전송하게 할 수 있다. 이 때 단말들은 전체 파일럿 전송에 사용되는 자원이 아니라 자신에게 할당된 파일럿 전송자원의 주변만을 모니터링 하여도 주변의 단말을 효율적으로 탐색할 수 있다. 이렇게 주변단말탐색을 위한 탐색영역을 줄임으로써 D2D 단말탐색에 사용되는 전력소모를 줄일 수 있다.
본 논문의 II장에서는 프록시미티 비콘기반 단말탐색 방안의 동작과 채널의 공간적 연관성에 대해서 알아본다. III장에서는 무선채널의 공간적 연관성을 고려한 단말탐색 방안에 대해서 설명하고 그 성능을 수학적으로 분석한다. IV장에서는 시뮬레이션을 통해서 제안 방안의 성능을 분석하고 이론적 분석의 정확도를 검증한다, 마지막으로 V장에서 본 논문을 마무리 한다.
Ⅱ. 프록시미티 비콘기반 단말탐색방안 및 무선채널의 공간적 연관성
본 장에서는 기존 프록시미티 비콘기반 단말탐색방안의 동작에 대해서 간략하게 설명하고 제안 방안의 파일럿 자원할당에 사용할 무선채널의 공간적 연관성에 대해서 설명한다.
프록시미티 비콘기반 단말탐색방안에서는 각 단말들이 브로드캐스팅하는 프록시미티 비콘(파일럿)을 이용하여 주변 단말을 찾는다. 단말탐색 동작을 살펴보면 D2D 통신을 위한 주파수대역 및 타임슬롯들 중 일부를 단말탐색 파일럿 송수신에 할당하고1) 기지국은 이 주파수대역 및 타임슬롯의 일부를 각 D2D 단말들에게 파일럿 전송용으로 임의로 할당한다. 이후 각 D2D 사용자들은 자신에게 할당된 자원을 이용하여 파일럿을 송신하고 나머지 시간에는 대역센싱을 통해 다른 단말이 송신하는 파일럿을 수신한다. 수신된 파일럿에서 얻어진 정보를 통해 주변단말을 확인할 수 있다.
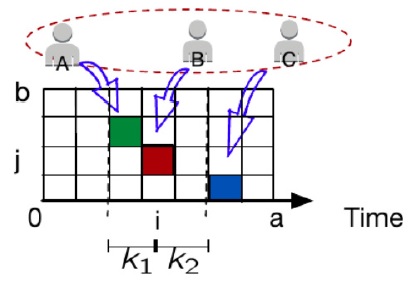
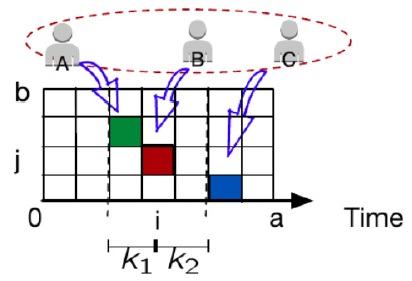
본 논문에서는 그림 1에서 볼 수 있듯이 파일럿 전송에 할당된 주파수대역 및 타임슬롯이 a개의 타임슬롯과 b개의 주파수대역으로 나뉜 환경을 고려하였다. 즉 파일럿 전송에 사용할 수 있는 전체 Resource Block (RB)은 a × b개이다. 이 때 그림 1에서 볼 수 있듯이 사용자 B가 RB
무선채널에는 공간적 연관성이 존재하여 비슷한 위치에 있는 단말들은 비슷한 채널환경을 가지게 된다. 특히 [6]에서 볼 수 있듯이 무선채널 요소들 중 Azimuth spread (AS), Delay spread (DS), Shadow fading (SF)가 공간에 따른 연관성을 보인다. 각 채널요소3)의 값을 Y라 표기하였을 때 AS, DS 및 SF의 값은 다음과 같이 나타낼 수 있다.

여기서 σ, μ는 채널요소의 값의 분산과 평균값을 나타내고 X는 평균이 0이고 분산이 1인 가우시안 랜덤변수를 나타낸다. 즉 (1)의 식을 이용해서 각 채널요소의 값을 표준정규분포를 갖는 랜덤변수로 변환이 가능하다.
이 때 거리 d만큼 떨어져 있는 두 단말 A와 B의 변환된 채널요소의 값인 XA와 XB는4) 다음과 같은 공간적 연관성(Spatial correlation)을 가지게 된다.

여기서 dref는 채널환경에 따라 변화하는 상수 값을 의미하고 일반적인 무선통신환경에서 50m의 값을 가진다[8]. 수식 (2)에서 볼 수 있듯이 두 단말 사이의 거리가 가까울수록 두 단말 채널요소의 값의 연관성이 1에 가까워진다. 즉 두 단말은 비슷한 채널요소의 값을 가지게 된다. 하지만 거리가 멀어질수록 공간적 연관성이 지수적으로 감소하여 일정이상 떨어진 단말들의 채널은 서로 독립적인 것을 확인할 수 있다. 본 연구에서 제안한 단말탐색방안에서는 채널 요소의 연관성을 이용하여 비슷한 위치의 단말이 비슷한 시간의 타임슬롯에서 파일럿을 전송하게 함으로써 효율적 단말탐색을 가능케 한다.
1)퀄컴의 FlashLinQ의 경우 1초당 20ms의 시간을 단말탐색을 위한 파일럿 전송에 할당한다. 2)여기서 i는 time index를 나타내고 j는 frequency index를 나타낸다. 3)여기서 채널요소의 값은 AS, DS 및 SF중 아무 채널요소나 적용될 수 있다. 4)여기서 변환된 채널요소의 값은 수식 (1)을 이용해서 표준정규분포로 변환된 채널요소의 값을 의미한다. 즉 X = (Y-μ)/σ 를 의미 한다.
기존의 단말탐색 방안에서는 단말탐색을 위한 파일럿자원을 임의로 할당한다[5]. 따라서 주변단말들을 정확하게 찾기 위해서는 파일럿 전송에 할당된 전체자원에 대해 파일럿수신을 수행해야 한다. 하지만 무선채널의 공간적 연관성을 기반으로 하여 파일럿을 할당함으로써 비슷한 위치에 있는 단말들이 비슷한 타임슬롯을 이용하여 파일럿을 전송하게 할 수 있다. 이를 통해 단말들이 전 대역을 살펴보는 것이 아니라 실제주변단말이 파일럿을 전송할 확률이 높은 일정부분에서만(즉 자신이 파일럿 전송을 수행하는 타임슬롯의 주변자원) 단말탐색을 수행하게 하여 수신대역을 줄임으로써 단말탐색에 사용되는 전력소모를 줄일 수 있다.
제안방안의 동작은 다음과 같다. 우선 기지국은 각 단말들이 전송한 업링크 파일럿을 이용하여 각 단말의 무선 채널요소의 값을 측정한다. 이후 (1)을 이용하여 채널요소의 값을 표준정규분포를 따르는 랜덤변수로 바꾸고 이 값을 기준으로 파일럿을 순서대로 각 단말에게 할당한다.
즉 그림 1에서 단말 A는 단말 B에 비해서 낮은 채널요소의 값을 가지고 있기 때문에 낮은 타임슬롯을 할당받고 단말 C는 더 높은 채널요소의 값을 가지고 있기 때문에 더 높은 타임슬롯을 할당받게 된다.
각 단말들은 자신이 할당받은 타임슬롯 주위의 자원(자신이 파일럿을 전송하는 타임슬롯보다 k1만큼 작거나 k2만큼 큰 대역의 자원들, 그림 1참조)만을 센싱하고 나머지 대역에서는 Sleep 모드로 전환하여 대역을 수신하지 않음으로써 전력소모를 줄인다. 단말들은 자신이 센싱하는 대역에서 주변단말이 파일럿을 전송하였을때만 단말을 인지할 수 있다. 즉 그림 1에서 단말 B는 단말 A의 존재를 인지할 수 있지만 단말 C의 존재는 인지할 수 없다.
제안방안에서는 k1과 k2의 값(단말탐색범위)을 조절함으로써 주변단말탐색의 정확도와 전력소모의 trade-off를 조절할 수 있다. 즉 k1과 k2의 값을 늘리면 더 많은 주변단말들을 탐색할 수 있지만 전력소모가 많아지고, k1과 k2값을 줄이면 전력소모를 줄일 수 있지만 탐색 가능한 주변단말의 수가 줄어든다.
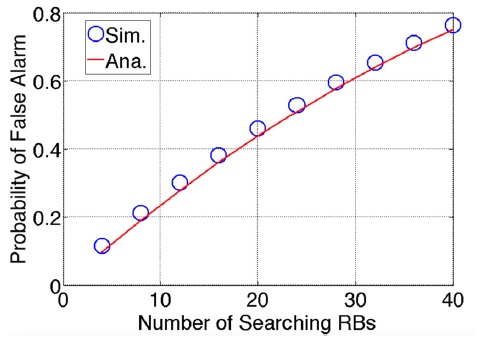
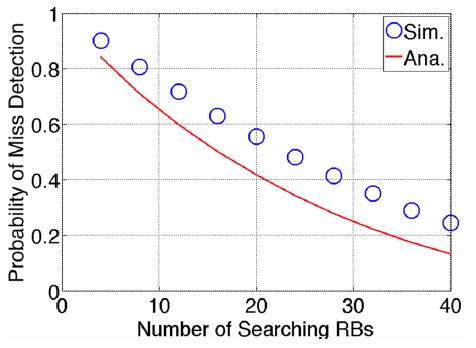
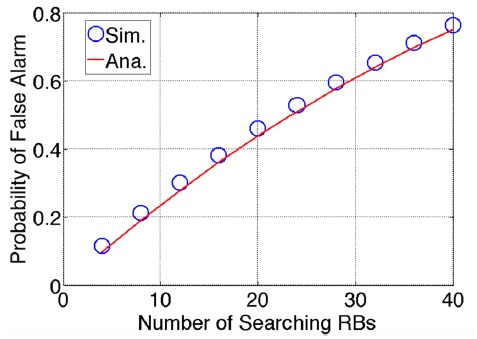
본 장의 남은부분에서는 제안한 단말탐색방안의 성능을 수학적으로 분석한다. 제안방안의 성능지표로서 False alarm 확률(PFA)과 Miss detection 확률(PMD)을 살펴보았다[7]. PFA는 잘못된 주변단말이 탐색되는 조건부 확률을 의미하고 PMD는 주변단말의 탐색에 실패하는 조건부 확률을 의미한다.
성능분석에서는 N명의 D2D 단말이 존재하고 D2D 파일럿 자원이 a개의 타임슬롯과 b개의 주파수대역으로 나눠진 환경을 고려하였다. 또한 두 단말간의 거리가 d보다 작은 경우에만 올바른 주변단말이 된다고 가정하였다. 분석기술의 편의를 위해서 아래와 같이 2개의 함수를 정의하였다.
상기 수식에서 Q(x)는 error function을 의미한다. 수식 (3)은
상기 두 식을 이용하여 단말의 수가 매우 많은 환경에서 단말탐색을 수행하는 단말의 채널요소의 값이 x이고 이 단말의 주변단말이 탐색단말의 searching range보다 작은 RB를 이용하여 탐색에 실패하는 확률을 아래와 같이 근사할 수 있다.

여기서 σ(d`)은 d`만큼 떨어진 두 단말의 연관성, 즉

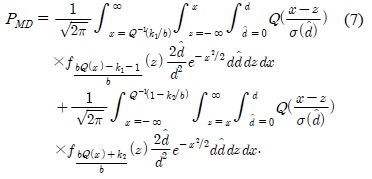
수식 (5)와 (6)을 결합하여 일반적인 환경에서의 PMD값을 아래와 같이 유도할 수 있다.
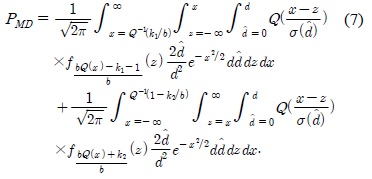
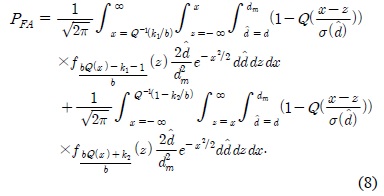
상기의 분석과 비슷한 방식으로 PFA도 아래와 같이 유도할 수 있다.
수식 (8)에서 dm은 D2D단말이 송신하는 파일럿 신호의 최대수신거리이다. 마지막으로 기존의 FlashLinQ 기반 단말탐색대비 제안 방안의 파워소모량을 계산하였다. FlashLinQ기반 단말탐색 방안의 파워 소모량이 PFLQ이고 단말이 수신할 때 사용되는 파워소모가 PR, 단말이 idle상태에 있을 때의 파워소모가 PI라고 했을 때 제안 방안의 파워소모는 PFLQ - (a - k1 - k2)/a × (PR - PI)가 된다. 즉 k1, k2의 값이 작아질수록 제안방안의 파워소모를 줄일 수 있으나 단말탐색의 정확도가 낮아진다는 단점이 있다.
본 장에서는 III장에서 제안된 단말탐색 방안의 PMD와 PFA의 성능을 Matlab기반 시뮬레이션을 통해 비교하였다.
성능 분석에서는 TU-32환경을 고려하여 dref = 50m로 가정하였고[8] 파일럿신호의 최대전송거리가 100m이고 단말간의 거리가 10m이하인 경우에만 주변단말로 인식하게 하였다[6]. 파일럿신호전송을 위한 시간 자원은 40개로 나눠져 있고 단일주파수 자원을 사용한다고 가정하였다5). 마지막으로 단말들이 Poisson Point Process(PPP)에 따라 분포하고 있다고 가정하였고 k1 = k2로 설정하였다.
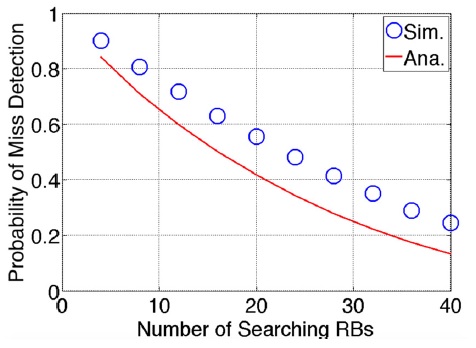
그림 2와 그림 3에서는 탐색단말의 탐색범위에 따른 false alarm 확률과 miss detection 확률을 각각 계산하였다. 기존방안인 FlashLinQ기반 단말탐색방안의 경우 단말탐색의 실패가 발생하지 않으므로 (즉 PFA= 0, PMD = 0) 시뮬레이션에 첨부하지 않았다.
제안방안의 성능은 수식 (7)과 (8)을 이용하여 이론적으로 분석되었고 컴퓨터 시뮬레이션을 통해서도 실험적으로도 분석되었다. 성능 분석에서 x축은 탐색단말의 탐색범위로써 (k1 + k2)를 의미하고, 즉 k1, k2=(number of searching RBs/2)가 된다.
그림 2와 그림 3에서 볼 수 있듯이 이론적 분석결과와 시뮬레이션을 통해 얻은 실험결과가 잘 맞는 것을 볼 수 있다.
두 값의 차이가 나는 이유는 이론적 분석에서 단말수가 매우 많은 환경에서 대해서 근사화를 하였기 때문이다. 또한 예상했던 것과 같이 주변단말탐색의 탐색범위가 늘어날수록 PFA가 증가하지만 PMD는 감소하는 trade-off 관계를 확인할 수 있다. 이는 단말탐색의 탐색범위가 증가할수록 주변단말이 탐색 단말의 탐색범위에 파일럿신호를 전송할 확률이 높아지지만, 동시에 주변단말이 아닌 단말(즉 10m보다 멀리 떨어져 있는 단말)의 파일럿신호도 수신할 확률이 높아지기 때문이다.
성능분석에서 볼 수 있듯이 탐색범위가 40이 되는 경우에도 PMD와 PFA의 값이 0과 1로 수렴하지 않는 것을 볼 수 있는데 이는 탐색범위가 40인 경우에도 파일럿 전송에 할당된 전체대역을 탐색하지 않기 때문이다. 탐색범위가 40일 경우에는 k1, k2= 20이 되고 탐색단말이 전체 파일럿 전송에 할당된 자원 중 중간에 위치한 자원을 이용하는 경우에만 전체 대역을 탐색하게 된다. 극단적인 경우 탐색단말이 <1, 1>의 자원을 이용하여 파일럿을 전송할 때는 절반의 대역만 탐색하게 될 것이다.
본 성능분석에서 나타내지는 않았지만 탐색범위가 커질수록 주변단말탐색에 필요한 전력소모가 증가한다. 따라서 본 제안기술을 실제 D2D 시스템에서 활용하기 위해서는 이러한 성능의 trade-off 관계를 잘 고려하여 목표성능에 맞게 탐색범위를 설정해야 할 것이다.
5)a = 40이고 b = 1이다.
본 연구에서는 D2D 통신을 위한 주변단말 탐색방안에 대해서 다루었다. 제안 방안에서는 주변단말 탐색파일럿 전송자원을 임의로 할당하는 기존의 방안과 달리 무선채널의 공간적 연관성을 활용하여 무선 채널요소의 값에 따라서 파일럿 자원을 할당함으로써 비슷한 위치에 있는 단말들이 비슷한 위치의 파일럿 전송자원을 이용하게 한다.
이를 통해서 더 좁은 범위만을 탐색하더라도 정확하게 주변단말을 인지할 수 있고 결국 단말탐색에 소모되는 전력 양을 줄일 수 있다. 본 연구에서는 제안방안의 탐색정확도를 이론적으로 분석하였고 시뮬레이션을 통해서 이를 검증하였다.