In the recent days, interests in machine-to-machine communication schemes in small-scale networks has been increasing with growing demands. TDMA(Time Division Multiple Access) can be used as a multiple access method in small-scale networks. However, time synchronization for TDMA is complicated or needs additional equipments. Such a large cost is not suitable for small-scale networks. We propose, BC-DESYNC, a efficient time synchronization for small-scale networks by extending DESYNC(DESYNChronization). DESYNC takes a long time to complete synchronization and doesn't guarantee the synchronization delay. BC-DESYNC uses CU(Central Unit) that performs a centralized control to achieve the 2-hop communication and guarantees the synchronization completion time by using Mimic firing and C-DESYNC scheme.
무선랜(Wireless LAN), 블루투스(Bluetooth), 지그비(Zigbee) 등의 무선 통신 방식으로 데이터를 교환하는 근거리 통신망은 효율적인 통신을 위해 한정된 채널을 다수의 단말기들이 공유하기 위한 다중 접속(Multiple Access)기술이 필요하며, FDMA(Frequency Division Multiple Access), TDMA(Time Division Multiple Access), CDMA(Code Division Multiple Access) 등의 기법들이 대표적이다. 본 논문에서는 가용 대역폭을 슬롯으로 나누어 자신에게 할당된 시간 슬롯에서 모든 대역폭을 이용하여 통신하는 TDMA에 초점을 맞추고 있다. 이러한 TDMA에서 모든 노드가 슬롯에 대한 동일한 기준을 갖기 위해서는 동기화 과정이 선행되어야 한다. 본 논문은 동기화 과정을 단순화하기 위해 DESYNC 알고리즘을 이용하는 기법을 제안하고자 한다.
최근에는 기기간 통신, 웨어러블 디바이스, 홈 네트워크에 대한 수요가 증가하면서 소규모 무선 네트워크에 적합한 통신 방법들에 대한 관심이 급증하였다. 또한 소규모 무선 네트워크는 군의 근본적인 전략적 특성과 작전 수행 능력의 최적화를 위해 미래에 군용 시스템에 활용될 가능성이 크다. 이러한 시스템에는 기본적으로 TDMA 방식이 사용될 수 있다. 그러나 TDMA는 지속적으로 동기화를 이루기 위하여 추가 장비가 필요하고 구현하기 복잡하며 비용적인 측면에서 비효율 적이기에 무선 랜, 블루투스, 홈 네트워크, 군용 시스템 같은 소규모 네트워크에서는 적합하지 않다. 무선 랜의 경우 동기화를 위해 LAN card와 같은 추가 장비를 필요로 하며 무선 채널의 특성상 신호품질이 불안정하고 신호 간섭이 발생할 수 있다. 또한 상당히 많은 양의 전력을 사용하는 단점이 있다. 때문에 소규모 네트워크에는 단순한 동기화 방식이 필요하다. 간단한 규칙을 이용하여 주기적이고 공정하게 주변에 이벤트를 발생시켜 동기화를 이루는 DESYNC는 이벤트 신호에 매우 적은 에너지를 사용하기 때문에 비용측면에서 효율적이다[1, 2].
하지만 소규모 네트워크에 DESYNC를 적용한다면 해결해야 할 두 가지 문제가 존재한다. 첫 번째는 DESYNC의 모든 노드는 전송 범위 내에 있어야 하고, 모든 노드는 연결되어 있어야 한다는 점이다. 이는 단일 홉 무선 네트워크에서는 적합하지만 2-홉(Hop) 이상의 무선 네트워크에서는 적합하지 않다. 두 번째는 모든 노드가 균등한 채널을 공유하기 때문에 동기화 상태 완료까지의 지연시간을 보장하지 않고, 동기화 상태 완료까지 걸리는 시간이 길다는 점이다[1-3].
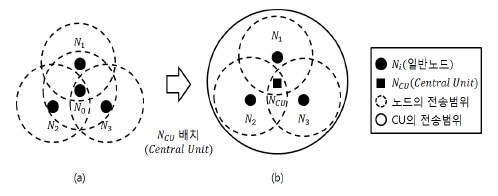
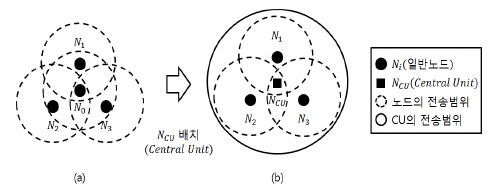
본 논문에서 제시하는 알고리즘은 두 가지 방법으로 이루어져 있다. 첫 번째는 네트워크에 참여하는 노드 중 하나의 노드를 전송범위가 넓은
DESYNC는 단일홉 형태의 무선 네트워크에서 간단한 규칙으로 공정한 이벤트를 사용해 동기화를 이루기 위한 알고리즘이다. 기존 TDMA 방식은 동기화를 위한 신호 및 추가 작업이 필요하지만 DESYNC는 이러한 추가 작업이 필요 없다. 또한, 네트워크에 참여하는 노드의 개수에 상관없이 노드 스스로 동기화를 이루고 유지하며, 네트워크를 구성하는 노드가 결함, 추가, 삭제가 되어도 스스로 네트워크 유지가 가능하다.
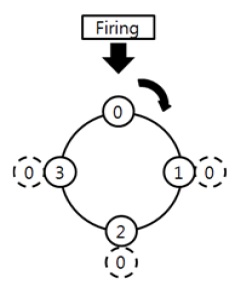
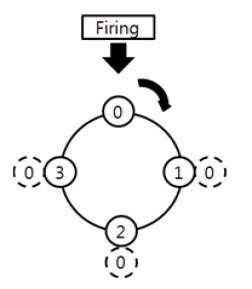
DESYNC의 각 노드들은 일정한 간격마다 주기적으로 펄스신호를 발생시킨다. 펄스신호는 firing이라 하며, 노드는 firing시 자신의 주기정보를 전송 범위 내에 노드들에게 전송 한다.


DESYNC에서 노드들의 초기 firing 시각은
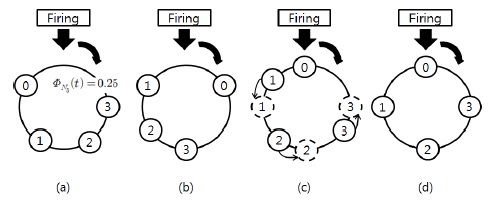
노드들은 firing 직전과 직후의 인접노드 정보를 이용하여 자신의 다음 firing 위치를 정하게된다. 그림 2와 같이

Mimic DESYNC는 기존 DESYNC 알고리즘에서 전송범위를 벗어나 통신이 불가능한 노드들에게 CU를 통하여 통신이 가능하도록 개선된 알고리즘이다. Mimic DESYNC는
Mimic DESYNC의 모든 노드들의 초기 배치과정은 자신의 firing 시간을

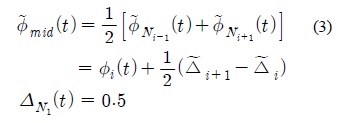
수식 (3)을 이용하여 중간값을 계산할 때, 각 노드는 주기마다 새로운 중간값을 가지게 된다. 이 과정을 반복하면 모든 노드들은 중간값이 변동이 없는 하나의 값으로 판단한다. 이러한 상태를 DESYNC라 정의하며, DESYNC 상태를 판별하기 위해 전체 주기를 전체 노드 수로 나눈 평균값은 수식(3)과 같다.
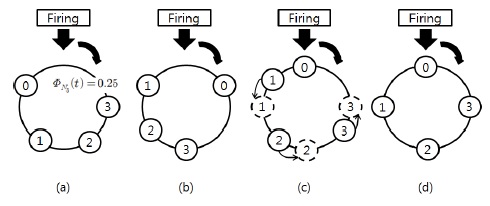
그림 3-(a)의 각 노드
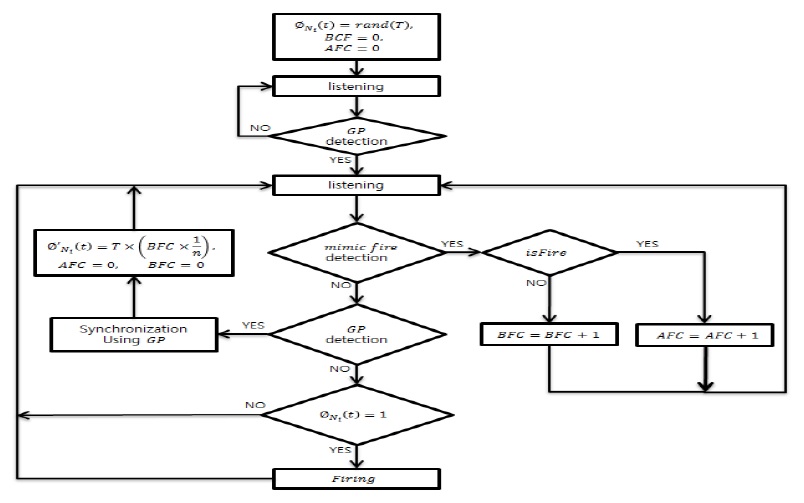
그림 4는 Mimic DESYNC 알고리즘의 모든 노드의 firing 순서를 나타낸다. 그림 4의
이 과정을 Mimic firing이라고 정의한다.
기존 DESYNC의 동기화 방식은 간단한 규칙과 펄스 신호를 이용하여 동기화를 이루기 때문에 비용측면에서 효율적이다. 하지만 DESYNC는 네트워크가 동기화에 이르는 지연시간을 보장하지 않기 때문에 노드의 초기 firing 시각과, 노드의 개수에 따라 동기화 상태 완료에 이르는 지연시간이 달라진다. C-DESYNC는 기존 DESYNC의 지연 시간 보장을 위한 문재점 개선에 의해 제안되는 알고리즘이다. 기존 DESYNC에서의 각 노드들은
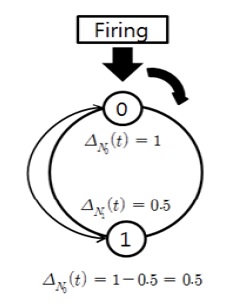
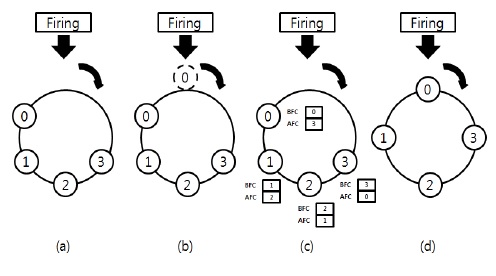
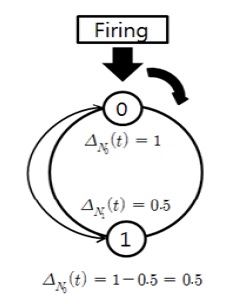
C-DESYNC의 각 노드들은 자신이 firing한 시각과 진전과 직후의 firing한 노드의 정보인

C-DESYNC는 자신이 firing하기 이전의 firing한 노드들의 정보
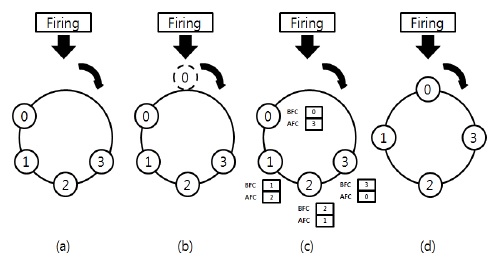
C-DESYNC의 노드들이 초기에 배치될 경우, 노드들은
그림 5는 C-DESYNC의 동작 수행과정을 보여준다. 큰 원은
본 논문에서 제안하는 BC-DESYNC는 기존의 다중 접속 방법의 동기화 과정을 추가적인 장비가 필요 하지 않고, 간단한 규칙과 펄스 신호를 이용하여 동기를 유지 할 수 있기 때문에 비용적인 측면에 있어서 효율적이다.
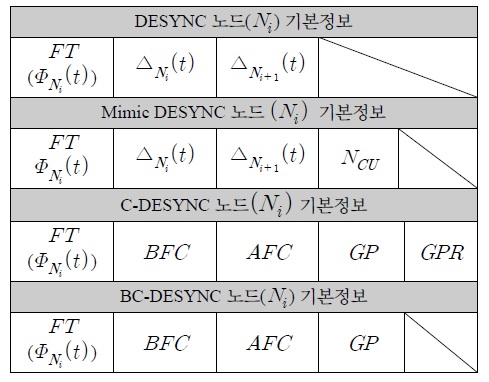
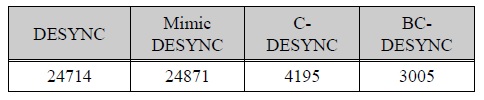
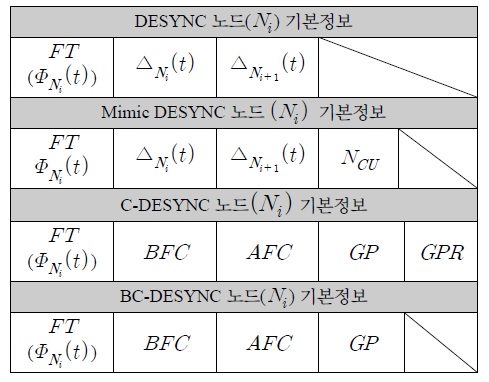
표 1은 DESYNC, Mimic DESYNC, C-DESYNC의 노드 기본정보와 본 논문에서 제안하는 BC-DESYNC의 노드 기본정보를 비교한 표를 나타낸다.
[표 1.] DESYNC와 Mimic DESYNC와 C-DESYNC와 BC-DESYNC의 노드 기본정보
DESYNC와 Mimic DESYNC와 C-DESYNC와 BC-DESYNC의 노드 기본정보
다음은 (표 1)에서 사용되는 노드 기본정보에 대한 설명이다.
DESYNC 노드 기본정보
Mimic DESYNC 노드 기본정보
C-DESYNC 노드 기본정보
BC- DESYNC 노드 기본정보
기존의 DESYNC는 동기화 상태에 이르기까지 노드의 개수에 따라 동기화 완료시까지 지연시간이 달라지지만, BC- DESYNC는
본 논문에서 제안하는 BC-DESYNC는 기존 다중접속방법의 동기화 과정에서 필요한 추가적인 장비를 사용하지 않고 간단한 방법을 통한 동기화를 이룰 수 있다. 또한 DESYNC의 단점인 동기화 상대 완료가 되기까지의 지연시간을 보장하고 2-홉 무선네트워크 환경에서도 가능하도록 개선하였다. Mimic DESYNC는 노드 중에서 한 개의 노드를 전송범위를 넓게 하여
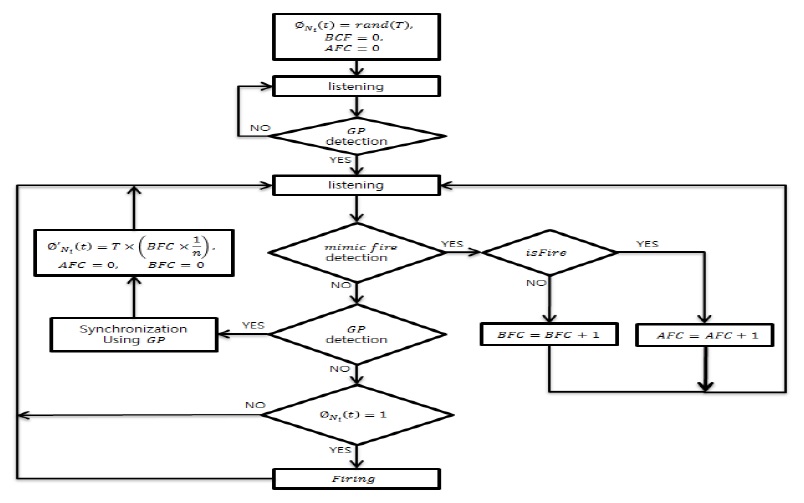
제안하는 알고리즘의
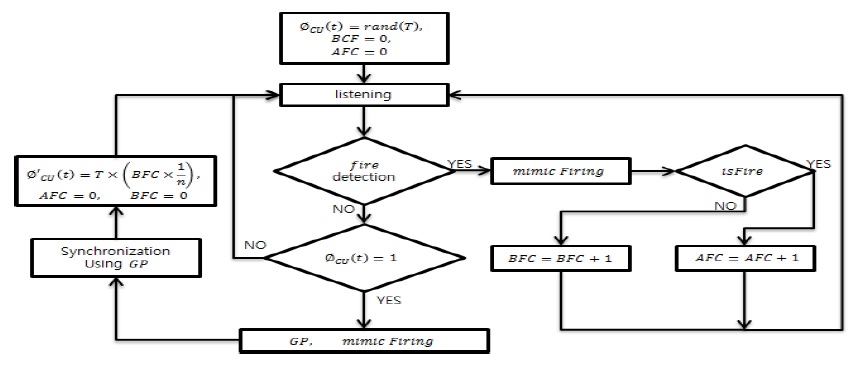
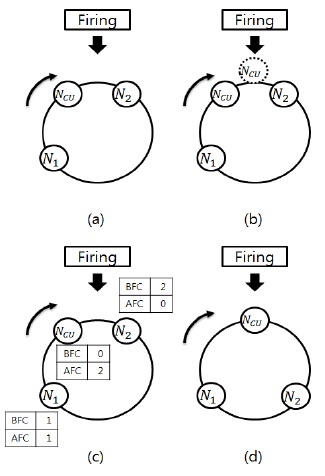
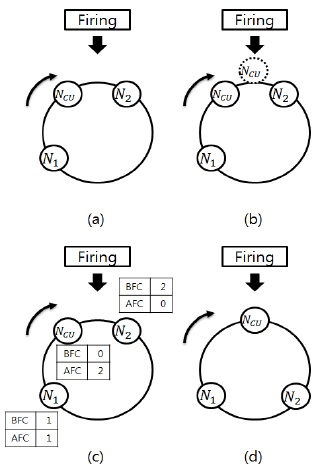
본 논문에서 제안하는 알고리즘을 이용하여 노드를 구성하였을 경우에 동작과정은 그림 8과 같다. 그림 8에서 큰 원은 주기
그림 8-(b)는
본 논문의 BC-DESYNC 알고리즘의 성능 평가를 위해 JAVA환경에서 개발 및 실험하였다. DESYNC와 BC- DESYNC의 동기화 과정을 비교하고, 비교 평가요소는 네트워크의 동기화 상태 완료까지의 최대 지연시간 MTTSC(Maximum Time To Synch Completion)을 측정하였다. 실험 결과는
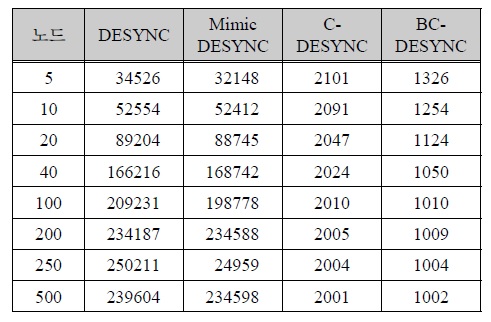
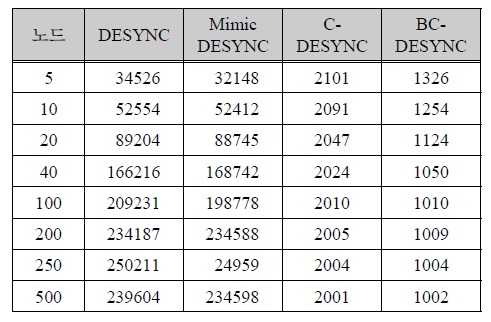
표 2는 DESYNC와 C-DESYNC, BC-DESYNC를 적용한 네트워크에 각 노드를 5, 10, 20, 40, 10, 200, 250, 500개를 추가하였을 때, 동기화 상태 완료의 MTTSC를 비교한 표이다. DESYNC와 Mimic DESYNC를 적용한 네트워크는 노드 개수에 따라 MTTSC가 증가한 것을 알 수 있고, C-DESYNC를 적용한 네트워크는 노드의 개수에 관계없이 3주기 이내에 동기화 상태 완료를 이룬다. BC-DESYNC를 적용한 네트워크는
[표 2.] DESYNC와 C-DESYNC와 개선된 DESYNC의 MTTSC
DESYNC와 C-DESYNC와 개선된 DESYNC의 MTTSC
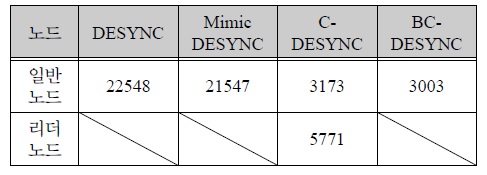
표 3은 DESYNC와 C-DESYNC와 BC- DESYNC를 적용한 네트워크에서 각 노드의 개수가 5개일 때, 동기화를 완료 후, 노드 하나가 삭제되었을 때, 동기화 상태 완료가 다시 이루어지기까지의 MTTSC를 비교한 표이다. DESYNC와 Mimic DESYNC를 적용한 네트워크는 노드 하나가 삭제되었을 때, 다시 동기화 상태 완료까지 걸리는 추가 시간이 필요한 반면, C-DESYNC는 3주기 내에 동기화를 이룬다. BC -DESYNC는
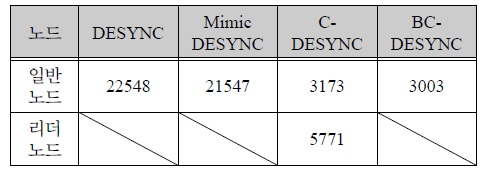
노드 삭제시 MTTSC
표 4는 DESYNC와 C-DESYNC와 BC- DESYNC를 적용한 네트워크에서 노드가 4개일 때 동기화 상태 완료 후, 노드 하나가 추가되었을 경우, 동기화 상태 완료까지의 MTTSC를 비교한 표이다. DESYNC와 Mimic DESYNC를 적용한 네트워크에서는 하나의 노드가 추가된 후, 다시 동기화 완료 상태가 이루어지기까지 많은 주기가 소모된다. 하지만 C-DESYNC와 BC-DESYNC의 경우에는 모든 노드들이 개수를 파악하여 다음 주기의 firing 시간을 맞추기 때문에 2주기 만에 동기화 상태가 완료된다.
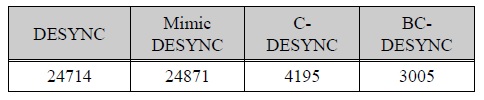
노드 추가시 MTTSC
본 논문에서는 DESYNC 알고리즘을 이용한 소규모 네트워크에 적합한 동기화 방식의 BC-DESYNC 알고리즘을 제안한다. 기존 DESYNC는 각 노드들이 동기화를 이루는 지연시간을 보장하지 않는 반면, BC-DESYNC는 다른 노드들보다 전송범위가 넓은 노드