In this paper, we proposed receiver structure based on an iterative turbo equalization to cope with phase difference between two sensors in MIMO underwater communication channel. In a space-time coded system, it is often assumed that there are no phase errors among the multiple transmitter and receiver chains. In this paper, we have studied the effect of the phase errors between different transmit sensors and different propagation paths in the environment of MIMO underwater communication system, and have shown through BER performance by computer simulations that the bit-error-rate performance can be severely degraded. A decision-directed estimation and compensation algorithm has been proposed to minimize their effects on the system performance. In this paper, we investigate the phase differences and their effects on multiple-input and multiple-output systems, and propose a compensation algorithm for underwater channel model to minimize their effects.
수중통신의 채널 특성의 시공간적인 변화는 디지털 수중 통신에서 송신하는 심벌간의 상호간섭이 (Inter-Symbol Interference : ISI) 야기하여 통신 시스템의 성능을 저하시키게 된다. 따라서 현재 열악한 채널 환경을 극복하고 전송율을 향상 시키기 위하여 여러 가지 등화기 기법과 함께 MIMO (Multiple Input Multiple Output) 시스템이 연구되고 있다[1,2].
MIMO 시스템에서는 서로 독립적인 채널 환경으로 수신되어야 하며 채널 추정이 정확하게 이루어져야 신호를 복원할 수 있다. 또한 송신기와 수신기의 위치에 따라 다양하게 발생하는 다중 채널로 인하여 신호의 복원이 어렵고 제한적인 대역폭 및 주파수를 이용하여 전송 속도가 낮은 수중 통신에서는 MIMO 기술을 이용하여 왜곡이 심한 수신 측의 데이터를 다이버시티 이득과 함께 부호화 이득으로 보상하여 성능을 향상 시킬 수 있는 MIMO 기술이 필요하다. 이러한 MIMO 기술에서 사용되어지는 시공간 부호(space time code)는 크게 전송 다이버시티와 부호화 이득을 동시에 가지는 시공간 격자 부호(space time trellis code)와 부호화 이득은 없고 전송 다이버시티만 가지는 시공간 블록 부호(space time block code)로 나눌 수 있다[3].
공간 블록 부호는 부호화 이득은 없지만 최적의 다이버시티 이득과 함께 간단하게 부·복호기를 구성할 수가 있다. 하지만 열하된 성능의 복원을 필요로 하는 수중 통신에서는 부호화 이득을 가지는 시공간 격자 부호 기술이 더 적합하다. 그러나 MIMO 수중 통신에서는 다중의 송신 센서에서 전송되는 신호가 여러 경로를 통하여 수신 센서에 도달하는데 각 수신센서에 도달되는 신호가 시간 경로 차이를 두게 된다. 이러한 위상 또는 시간적 차이는 수신 단에서 복호하는데 있어 성능 감소를 유발할 뿐만 아니라 동기를 획득하는데 어려움이 있다. 따라서 본 논문에서는 MIMO 수중 통신에서 도착시간 차이에 따른 시스템 모델을 설정하여 시간 오차를 보상하는 알고리즘을 제안한다.
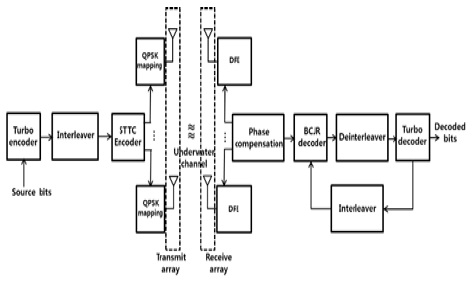
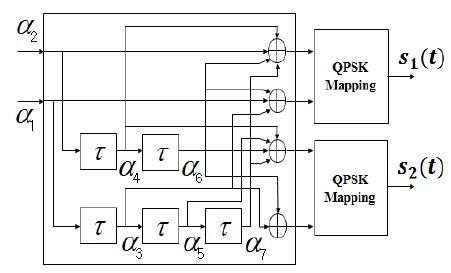
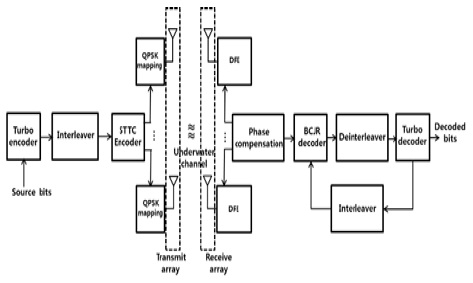
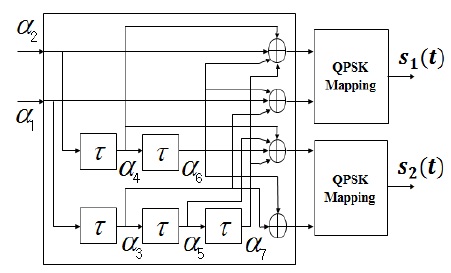
그림 1은 본 논문에서 제시하는 계층적 시공간 부호화 방식을 이용한 MIMO 수중 시스템 모델이다. 전송되는 비트 열을 터보 부호화하여 인터리빙 후, 시공간 격자 부호화를 한다. 시공간 부호는 다수의 안테나로부터 수신된 신호를 복호하기 위해 채널 부호화 기법과 다이버시티 기법이 접목된 시스템이다. 시공간 부호는 송·수신 양단에 다중 안테나를 적용하여 한정된 주파수 자원 및 송신전력을 이용하여 채널 용량을 증대시켜 높은 데이터 전송률을 제공 할 수 있다.
대표적인 공간 다중화 기법인 시공간 블록 부호 방식은 시공간 부호화된 신호를 다중 안테나를 통해 전송함으로써 수신국에서 다이버시티 이득을 쉽게 얻을 수 있는 기술 중 하나이다. 그리고 다른 공간 다중화 기법인 시공간 격자 부호 방식은 시공간 부호화 기법을 사용하여 시공간 블록 부호와는 다르게 송신하자 하는 데이터를 송신국의 다중안테나 수만큼 분리하여 전송하는 기법으로써 시공간 블록 부호보다 높은 데이터 전송률을 제공한다.
본 논문에서 적용되는 시공간 격자 부호는 복호화 과정에서 격자 구조를 이용한다. 효율적인 부호화 방법을 설계하여 격자 구조에서 각 패스의 hamming distance를 최대로 하여 채널 코딩 이득을 가지는 방법이다. 여러가지 방식의 부호 설계안이 제안되었으며, Tarokh, Baro, Blum의 최적의 부호 설계안이 여러 논문을 통해 발표되었다[4].
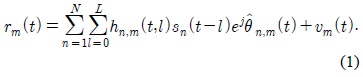
L은 멀티패스의 길이를 나타내며,
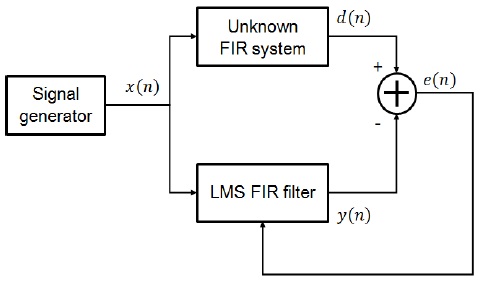
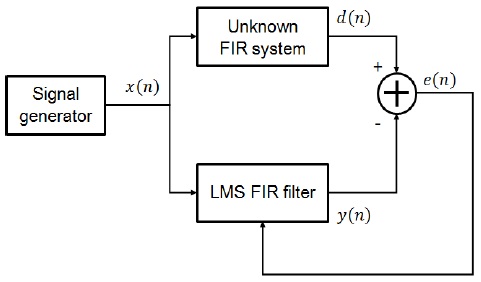
LMS 채널 추정은 평균자승 오차를 최소화하도록 반복적인 연산을 통하여 해를 구하는 방식으로 시간에 따라 변화하는 값을 추적해서 수렴하는 특성을 갖는다.
위의 그림 3을 이용해서 간단히 설명을 하겠다. 우선 채널

식 (3)은 출력

송수신간의 알고 있는 데이터

그리고 식 (4)를 보면 위 식 (3)에서 구한 에러값을 이용하여 채널을 계속 업데이트 해주게 된다.
본 논문에서 두개의 센서에서 송신되는 신호의 위상오차에 중점을 두어 연구하며 등화기에서 수중 채널 응답인
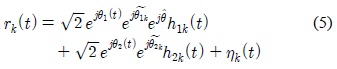
식(5)에서
송신 장치는 각각 구성되고 있는 소자의 전달 응답 특성이 다르고 수중에서 서로 다른 경로로 수신되기 때문에 두개의 송신 신호는 서로 다른 위상을 가지고 수신 측에 도달된다.
첫 번째 송신기에서 전송되는 신호가 상대적으로 다른 송신기에서 송신되는 신호의 위상의 차이를 파라메타 로 표현하여 식을 전개하였다. 식 (5)에서 채널 응답이 등화기에서 제거되어

여기서 를 나타내며, 이는 송·수신간의 이미 알고 있는 데이터의 함수로 나타낼 수 있으며, 는 전체 위상 오류를 나타낸다. 수신 신호의 진폭은 식 (7)과 같이 나타낼 수 있다.

다음 절에서 식(6)의 위상 오차를 추적하는 과정을 나타낸다.
수신단에서는 송신단의 역 과정으로 QPSK 변조된 신호가 수중 채널에서 다중 경로로 반사되어 들어오는 과정에서 위상 및 주파수 오프셋이 발생한다.
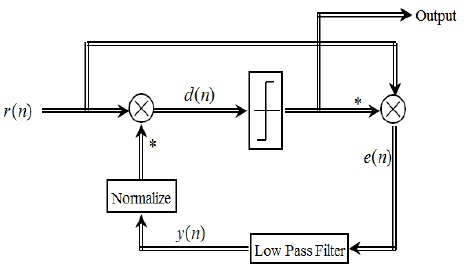
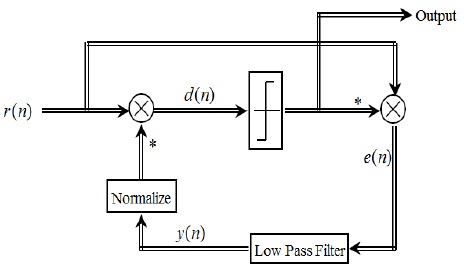
수신 측에서는 기저 대역 신호를 복원하기 위해서 반송파 신호를 제거할 필요가 있다. 따라서 동기 회로에서는 수신된 반송파의 위상과 자체 국부 발진기에서 재생된 신호와의 위상과의 차이인 위상 지터(jitter)를 최소화하는 것을 목표로 한다. 전송 효율을 극대화하기 위해서는 반송파 복원을 지원하는 프리앰블 데이터의 수를 가능한 한 작게 유지해야 하므로 빠르게 반송파를 포착할 수 있는 알고리즘이 요구된다. 그래서 본 절에서는 반송파 포착 성능 및 추적 성능을 개선함으로써 데이터 전송효율을 증가시킬 수 있는 DD(Decision-Directed) 방식을 제안하였고[7], 이의 구조는 그림 4에 나타내었다.
QPSK 수신신호는 아래의 식(8)과 같이 표현할 수 있다.

여기서

식(9)의 신호를 decision이 항상 정확하다고 가정하면,

Eb/No를 높게 주면 가우시안 잡음은 거의 무시할 수 있으므로, 해석을 용이하게 할 수 있다. 그러므로 용이한 해석을 위해서

식(11)에서 얻은 위상 잡음 신호의 진폭을 무시하고 AR(Auto-Regressive) LPF에 입력하면 식(12)를 만족한다.

여기서
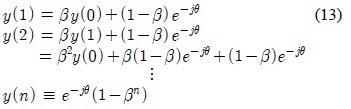
식(13)이 정상 상태에 도달하면 결과적으로 식(14)와 같이 표현할 수 있고, 정확히 위상 에러를 포착함을 알 수 있다.

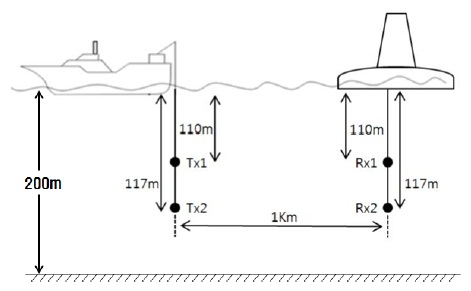
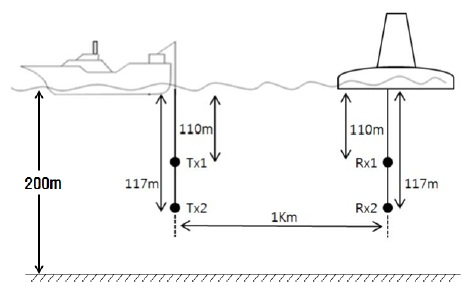
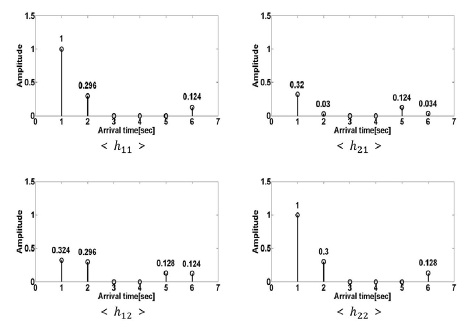
MIMO시스템에서 반복 터보 등화의 성능 향상을 확인하기 위해 시뮬레이션을 하였다. 수중 통신은 수중의 온도, 해수의 파고, 해저면 깊이에 따라 성능이 다르게 나타나고 있으며, 이러한 환경에서의 수중 채널 모델은 수중환경의 파라메타를 모두 포함하여 나타낼 수 있는 Bellhop 모델을 이용하여 채널 응답을 도출하였으며, 중요한 변수인 SSP(sound speed profile)는 실제 해역에서 측정된 자료를 이용하여 수중 채널 환경을 생성하였다. 본 논문에서는 2ⅹ2 MIMO 시스템을 고려하였으며, 각 채널의 Delay spread profile을 얻기 위해 Matlab을 기반으로 한 Bellhop 모델링 프로그램을 사용하였으며 그림 5와 같이 송수신기 간의 거리는 1km, 송신기의 깊이는 Tx1=110m, Tx2=117m이고 수신기의 깊이는 Rx1=110m, Rx2=117m에서 결과를 도출 하였으며 중심주파수는 16 kHz, 샘플링 주파수는 192kHz 이며, 변조방식은 데이터 속도 2kbps를 갖는 QPSK 변조 방식을 이용하였다. 수중 채널의 응답 특성을 알기 위한 송·수신간의 알고 있는 데이터인 PN 데이터는 길이를 1000 심볼로 적용하였다. 이러한 변수를 바탕으로 그림 5 (a) ~ (d) 는 송신기와 수신기 사이의 각 경로에 대한 수중 채널 응답을 Bellhop 모델을을 이용하여 획득하였다.
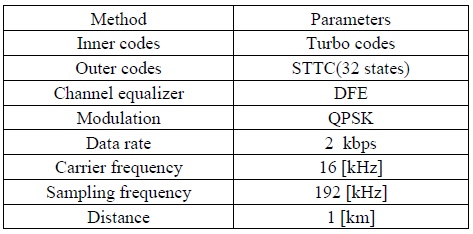
본 논문에서는 도착 시간에 따른 위상 차이가 성능에 미치는 영향을 알아보기 위해 모의 실험을 수행하였다. 두개의 송신 센서와 두개의 수신 센서를 가지는 시공간 부호화 방식을 적용하였다. 시공간 부호화 방식은 32 상태를 가지는 시공간 격자 부호화 방식을 적용하였으며, 프레임 길이가 130 인 QPSK변조 방식을 적용하였다. 시뮬레이션을 위한 파라메타는 아래 표 1과 같다.
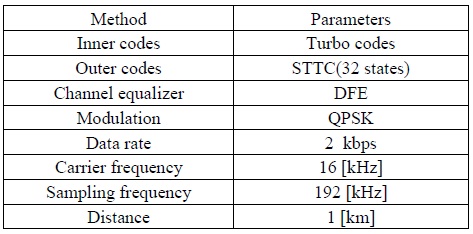
시뮬레이션 파라메타
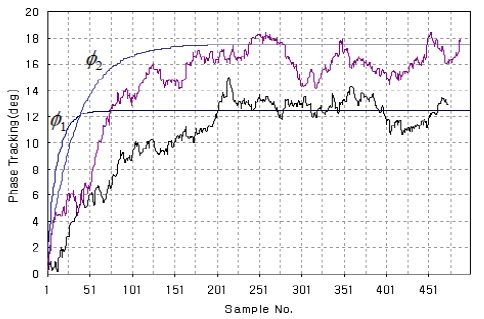
식 (7)에서 와 같은 위상 오류가 적용 되었다. 적용 된 값에서 를 구할 수 있으며, 그림 7과 같이 정확히 추적함을 알 수 있다. 그림 7은 Eb/No=7dB 과 DD방식을 이용한 위상 추적 알고리즘에서의 필터 상수 값은
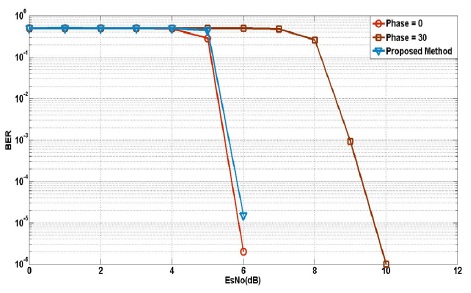
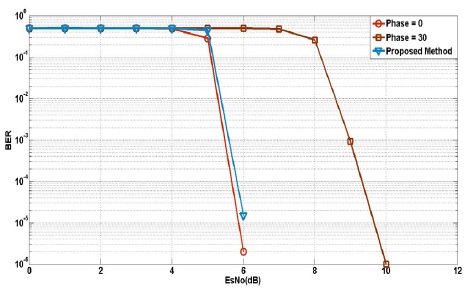
그림 8은 도착 시간에 의한 위상 오류에 대한 성능을 나타낸 그림이다. 제일 왼쪽의 곡선은 두 개의 센서간의 위상 차이가 없을 때를 나타내었으며, 제일 오른쪽 곡선은 30°의 위상차이가 존재하였을 때를 나타낸 성능 곡선이다. 제안한 DD를 이용하여 위상 추적을 보상시에는 기존의 위상 오류가 없는 성능과 거의 비슷한 결과가 나오며, 30° 위상 차이가 날 경우 오류율 10-3에서 약 4dB 의 성능이 감쇠됨을 알 수 있다.
본 논문에서는 수중 통신에서 성능을 향상시키면서 전송률을 높이는 터보 등화기반의 MIMO 수중 통신기법에 대해 연구하였다. 다중의 송신 센서에서 전송되는 신호는 여러 경로를 통하여 수신 센서에 도달하는데 각 수신 센서에 도달되는 신호는 시간 경로의 차이를 두게 된다. 이러한 위상 또는 시간적 차이는 수신 단에서 복호하는데 있어 성능 감소를 유발할 뿐만 아니라 동기를 획득하는데 어려움이 있다. 따라서 본 논문에서는 MIMO 수중 통신에서 도착시간 차이에 따른 시스템 모델을 설정하여 시간 오차를 보상하는 알고리즘을 제안하였다. 송·수신 알고리즘으로는 터보 부호와 시공간 부호화 방식을 적용한 터보 등화기법을 적용하였으며, 위상 오류 보상 알고리즘으로는 DD 위상 추적 알고리즘을 적용한 결과 위상 오류가 없는 성능과 거의 비슷한 결과가 나오며, 30도 위상 차이가 날 경우 오류율 10-3에서 약 4dB 의 성능이 향상됨을 확인하였다.