최근에 유가 상승 및 에너지 절감 정책 등으로 인해 원유나 가스를 시추하거나 정제하는 드릴쉽, 자항형 FPSO(Floating Production Storage and Offloading), FSRU(Floating, Storage, Re-gasification Unit), 셔틀 탱커 등의 수요가 증가하여 왔다. 이 선박들은 일반적으로 위치제어 기능과 추진 기능을 동시에 수행할 수 있는 아지무스(azimuth) 추진 시스템을 탑재하고 있다. 아지무스 추진기는 기존의 프로펠러-축타계 방식의 추진기에 비해 조종 성능이 뛰어나고 수직 축을 중심으로 임의의 각으로 회전할 수 있는 추진기로 추진기능과 조타기능을 동시에 수행할 수 있는 추력장치이다. 아지무스 추진기는 몸체인 포드(pod)와 몸체에 부착되어 구동되는 프로펠러로 구성되며 최근에는 대부분의 포드-프로펠러 시스템에 덕트가 추가된다. 덕트는 프로펠러를 둘러싸고 있는 원형 관을 가리키며 원래 운하에서 선박추진기를 보호하려는 목적으로 이용되었다. 덕트는 프로펠러에 유입되는 유속을 가속하는 가속형 덕트와 프로펠러로 유입되는 유속을 감속하는 감속형 덕트가 있다. 가속형 덕트는 추진효율을 향상시키려는 목적으로 사용되며, 감속형 덕트는 캐비테이션 및 소음을 감소시키기 위하여 사용되고 대부분 잠수함 등 함정용 추진기에 적용된다. 참고로 1930년대 항공공학자 Ludwig Kort에 의해 개발된 덕트 19A는 지금도 거의 수정 없이 많은 아지무스 추진기에 사용되고 있다 (Kort, 1937).
아지무스 추진기는 고급형 모터 내장형 포드 추진기와 일반 상선용 베벨/헬리컬 기어형 아지무스 추진기 등으로 분류되어 사용되고 있다. 아지무스 추진기의 수요가 증가함에도 국외 소수업체에서 해당 추진기들을 독점 개발/제작하여 왔기에 아지무스 추진기의 국내 설계나 제작에 대한 수준은 매우 낮고 관련 설계 및 기술 부재에 따라 아지무스 추진기를 개발하여 국산화하려는 노력이 진행되어 왔다. 국내에서는 아지무스 추진기 관련하여 Lee, et al. (2013)이 베벨기어형 아지무스 추진기 모형을 설계 제작하고 선형수조에서 성능 시험을 수행하였다. 또 Park (2012)은 모터 내장형 포드 추진기의 실선성능을 추정하는 방법을 제시하였다. Lee, et al. (2012)은 선박의 포드 프로펠러를 이용하여 횡동요를 제어하기 위한 연구를 수행하기도 하였다. 이와 같이 국내의 아지무스 추진/조종 성능 연구는 최근에서야 기본적인 연구가 이루어질 정도로 그 수준이 높지 않아 해당 추진기의 기술개발 노력이 시급한 실정이다.
본 연구에서는 삼우중공업에서 개발한 5.5MW급 아지무스 추진기에 대하여 그 성능을 조사하고 설계를 위한 기초 자료를 마련하고자 하였다. 모형 실험을 위해 베벨기어형 아지무스 추진기 모형을 제작하였고 모든 실험은 KRISO(한국해양과학기술원 부설 선박해양플랜트 연구소)의 대형 캐비테이션 터널에서 수행되었 다. 추진기 동력계 구조가 허락하는 범위에서 몸체뿐 만 아니라 프로펠러 및 덕트의 크기를 가능한 크게 하여 척도에 의한 효과를 최소화 하고 유속을 크게 하여 높은 전진비(advance ratio, J)에 대해서도 성능을 조사하려 하였다. 아지무스 추진기의 추력, 토크 계측과 함께 프로펠러 캐비테이션 관찰도 수행하여 아지무스 추진기의 성능을 다양하게 평가하고자 하였다.
본 연구에서 실시된 모형 실험은 대형 캐비테이션 터널 (LCT : large cavitation tunnel) 에서 수행되었으며, 각종 계측치들은 전산화된 자료취득장치에 의해서 얻어졌다. 터널의 시험부 제원은 (길이 × 폭 × 높이 : 12.5m × 2.8m × 1.8m) 이었다.
시험부에서 최대 유속은 16.5m/s이고 시험부 내부 압력은 0.02 기압(Kgf/cm2)에서 3.5 기압(절대압 기준)까지 변화가 가능하다. Fig. 1은 실험이 수행된 대형 캐비테이션 터널의 상부와 함께 시험부를 나타낸다.
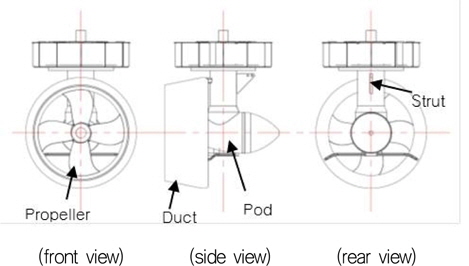
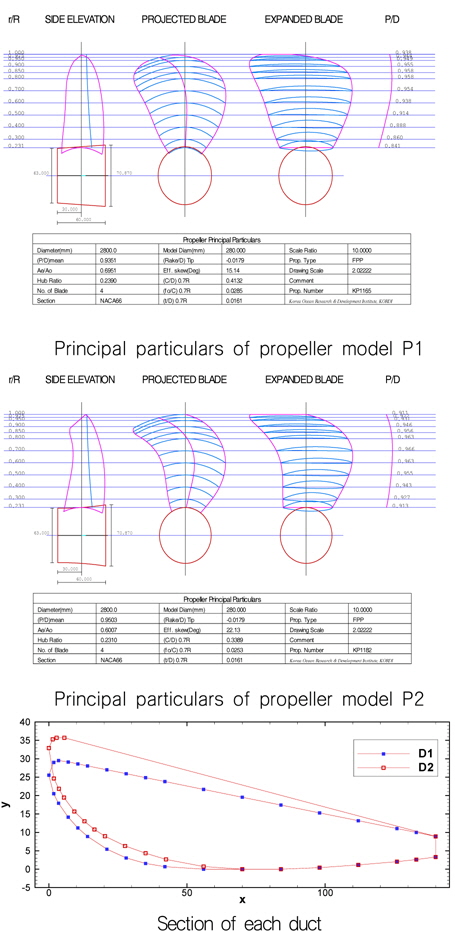
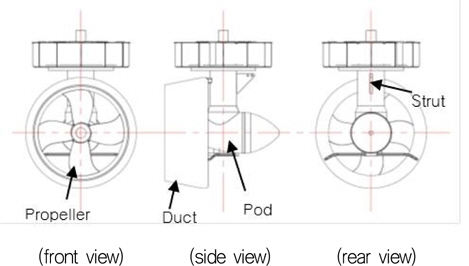
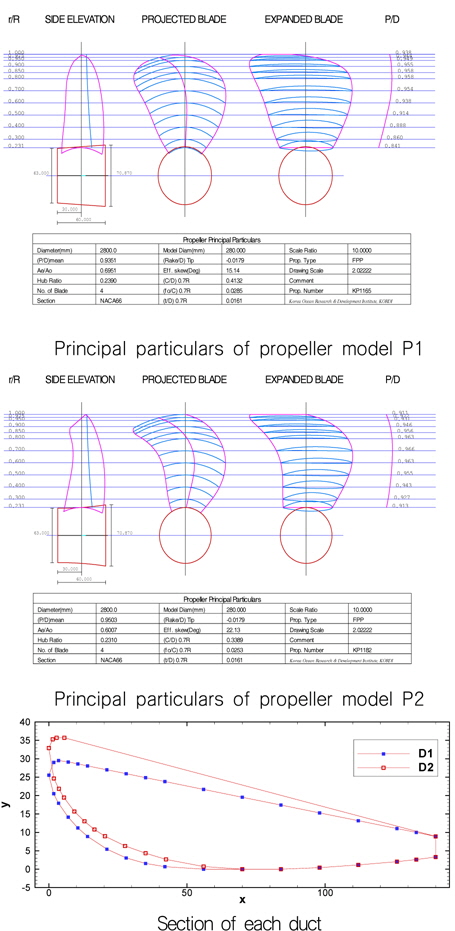
아지무스 추진기 모형은 Fig. 2에서 보는 바와 같이 프로펠러, 덕트, 몸체 및 몸체와 구동모터를 연결하는 스트럿(strut)으로 구성되며 실제 척도(scale)의 1/15로 제작되었다. 프로펠러 및 덕트는 삼우중공업에서 설계하였는데 실험에 사용된 프로펠러 제원 및 덕트의 단면을 Fig. 3과 같이 표시하였다. X=0 위치를 덕트의 앞날끝(leading edge)이라고 하며 X=140 위치를 뒷날끝(trailing edge)이라고 칭하였다. P1 프로펠러는 날개끝으로 갈수록 코드길이(chord length)가 작아지는 전형적인 형상을 갖는다. 그러나 P2 프로펠러의 경우 날개끝으로 갈수록 전형적인 프로펠러 보다 긴 코드길이를 유지하는 카플란(Kaplan) 형태의 프로펠러이며 덕트프로펠러에 많이 적용되는 형상이다. P1과 P2의 단독성능 시험시 효율은 비슷하였다. D1 덕트의 경우 덕트 단면으로 많이 쓰여지는 19A단면을 적용하였으며 D2 덕트의 경우 D1보다는 좋은 효율을 내는 단면을 적용하고자 D1보다 앞날을 들어 설계하였다.
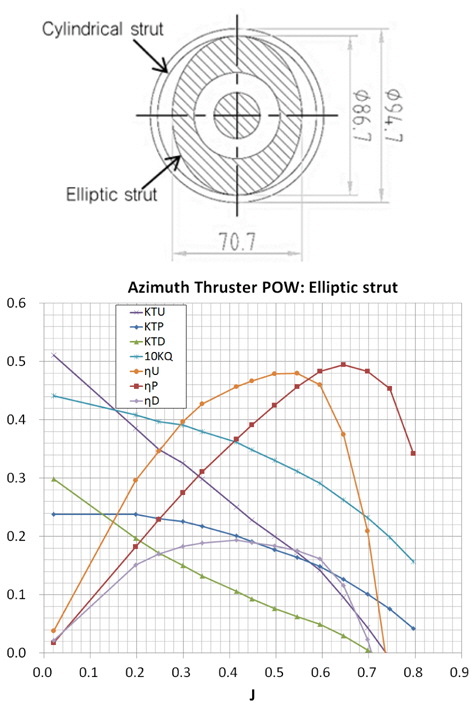
추진기를 지지하고 수직 힘 전달 축을 보호하는 스트럿의 초기 실린더 모양은 원형을 갖도록 하였다. 원형 실린더 형상을 취할 경우 실선 척도에서 스트럿을 제작하기 용이하여 설계사나 제작사에서 많이 선호하고 있다. 그러나 원형 실린더 모양의 스트럿은 물리적으로 방출 와류(shedding vortex) 유동을 스트럿 후 방으로 발생시키게 된다. 이 방출 와류들은 한 쌍의 보오텍스가 일정한 주기를 가지고 교대로 나타난다. 보오텍스들이 교대로 나타나는 주기 T (= 1/f, f는 방출 주파수)와 특성 길이 L (실린더의 경우 직경), 유체속도 V를 이용하여 차원 해석에 유용한 수인 St수(=fL/V, Strouhal number)를 계산 할 수 있는데 일반적으로 원형 실린더의 St는 0.19 – 0.22의 값을 갖는다.
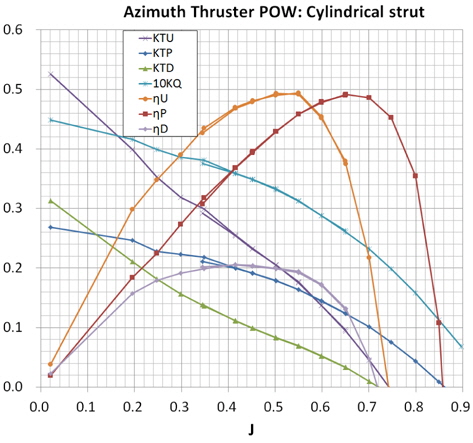
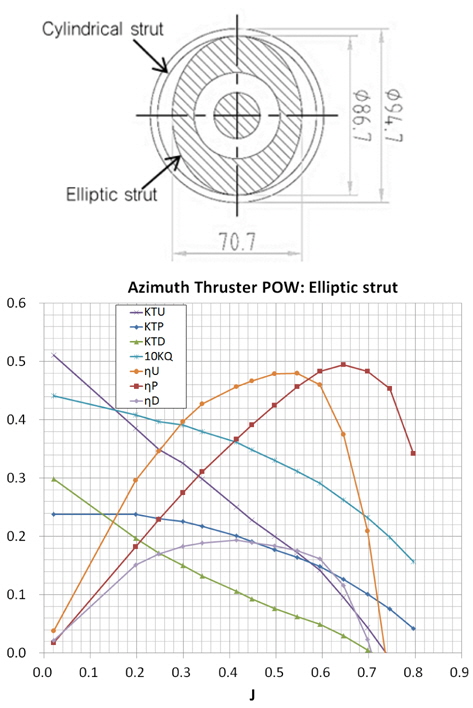
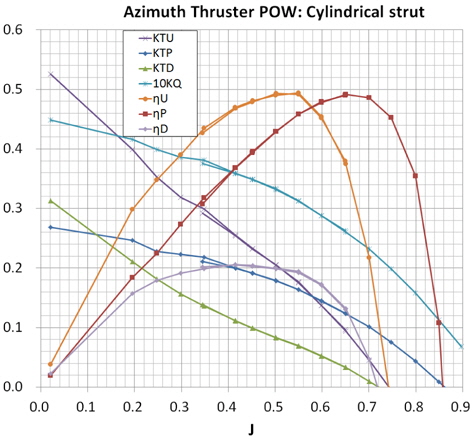
실린더에서 유기되는 방출 주파수 f의 값이 아지무스 추진기 스트럿의 구조적인 고유 주파수와 유사하게 변화할 경우 아지무스 추진기 구조물에 공진(resonance)이 발생하여 피로 손상이나 소음 진동 피해가 나타날 수 있어 주의가 필요하다. 원형 실린더 스트럿은 실제 척도에서 나타날 수 있는 VIV(Vortex Induced Vibration)뿐 만 아니라 강한 세기(intensity)의 보오텍스들을 프로펠러로 유입시키므로 프로펠러에 부가적인 캐비테이션과 기진력(propeller induced excitation force)을 발생시킬 수 있다. 원형실린더 스트럿의 경우 모형 아지무스 추진기의 단독성능을 계측하게 되면 Fig. 4와 같이 0.2 < J < 0.6 (전진비 J = V/(nD), V는 추진기 유입속도, n은 프로펠러 회전수, D는 프로펠러 직경) 구간에서 흘림 보오텍스가 집중적으로 나타나 프로펠러의 추력(T), 토크(Q) 계측치에 변동 성분을 주게 된다. 이 변동 성분들은 힘 계측치에 오차를 크게 하여 아지무스 추진기의 성능을 정확하게 조사하는 것을 어렵게 한다. 따라서 본 연구에서는 방출 와류의 세기가 비교적 낮고 그 크기가 작게 나타나도록 하기 위하여 실린더의 모양을 원형에서 타원형으로 변화를 주었다(Fig. 5).
실린더의 형상이 원형에서 타원형으로 바뀌면 St 수가 다소 증가하여 방출 주파수를 다소 증가시키는 효과를 얻을 수 있다. 비록 방출 주파수가 다소 증가하더라도 방출 와류의 크기와 세기를 약화시킴으로써 원형 실린더의 경우에 비해 프로펠러 유입 유동의 변동 성분이 다소 낮아져 힘 계측이나 캐비테이션 관점에서 이득을 얻을 수 있다. Fig. 5는 적용된 타원형 스트럿의 횡단면(빗금을 친 부분이 변경된 스트럿) 및 개선된 스트럿을 적용한 후의 아지무스 추진기 성능 시험 결과를 보여준다. 원형 스트럿의 경우 힘 계측치의 변동 성분이 1.78 – 2.34%였으나 타원형 스트럿을 사용할 경우에는 힘 계측치의 변동 성분이 0.39 – 1.06%로 낮아져 스트럿의 형상이 힘 계측치에 영향을 주었음을 확인할 수 있다.
아지무스 추진기 동력계는 모형 추진기의 추력 및 토크, 회전수를 정밀하게 계측할 수 있으며 아지무스 추진기의 상부에는 추진기에서 작용하는 힘과 아지무스 형상에 의한 저항력을 동시에 계측할 수 있는 3분력계가 설치되었다. 전체 동력계는 수밀용 구조를 가지고 있다. 터널 내부에서 운용되므로 물에 의한 부식을 방지하기 위하여 스테인레스 스틸 또는 동등 이상의 재질을 사용하여 제작되었다. 또한 캐비테이션 터널 설비에서 사용 시 터널설비 자체의 압력변화에 따른 추력 및 토크, 회전수를 계측하는데 영향을 받지 않는 구조를 가지며(Fig. 6) 구동전기모터를 포함한 아지무스 추진기 동력계의 전체시스템 구동 시 베벨기어 등에서 나타나는 기계적 소음을 최소화할 수 있도록 설계 및 제작되었다.
아지무스 추진기 동력계의 힘 계측 사양은 하기와 같다.
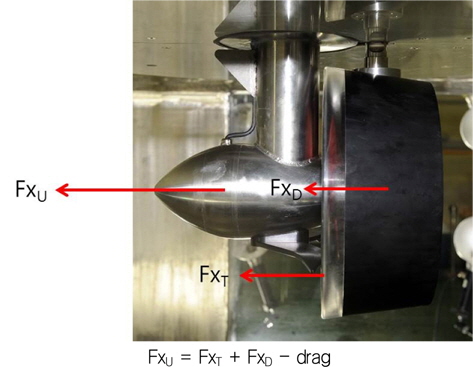
- 프로펠러 : 추력 FxT (2000N), 토크 FxQ (80Nm), 회전수 n (36rps) - Unit : FxU (2000N), FyU (2000N), MzU (100Nm) - 덕트 : FxD (1000N)
여기서 힘을 F라고 표기하고 모멘트를 M이라고 표기하였다. 힘의 방향에 대한 정의는 시험부의 하류 즉 선미 방향을 +x 방향이라 하고 우현(시험부 오른편) 방향을 +y 방향, 높이 방향을 +z 방향이라고 하였다.
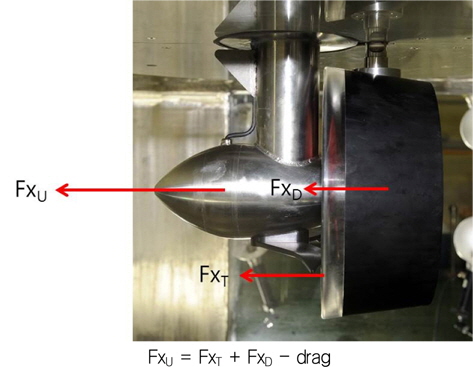
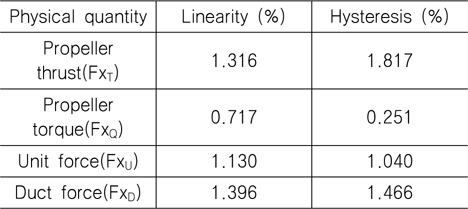
Fig. 7에 아지무스 추진기에 작용하는 힘에 대하여 간략히 표시하였다. 본 시험을 수행하기 전에 동력계의 각 센서가 주어진 부하에 대해 적절히 작동하는지 살펴 보기 위하여 센서 보정 시험을 수행하였으며 Table 1에 사용된 동력계의 특성치 결과를 나타내었다. 여기서 선형성(linearity)은 계측된 보정 자료들이 얼마나 선형성을 유지하는 지 살펴보기 위하여 원점과 보정 자료들을 연결한 직선상으로부터 데이터의 최대 오차가 얼마나 존재하는지 조사한 것이다. 이력현상(hysteresis)은 무부하 상태에서 최대 부하상태까지 차례로 보정을 한 후 다시 무부하 상태로 차례로 보정할 경우 그 보정 값이 원래의 값으로 돌아 오지 못하고 발생할 수 있는 최대 오차를 의미한다.
[Table 1] Characteristics of the dynamometer
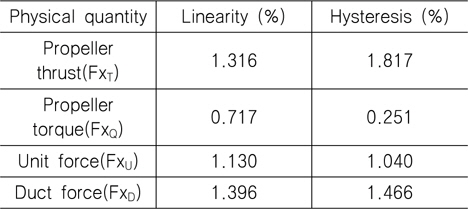
Characteristics of the dynamometer
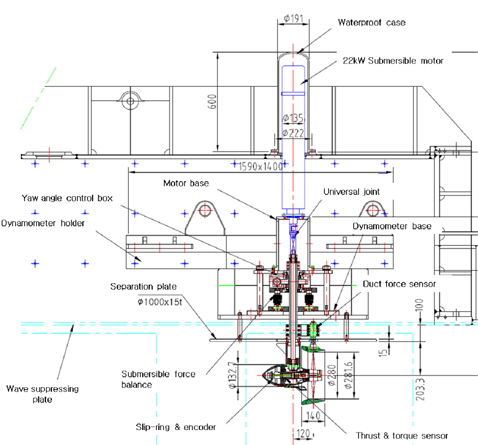
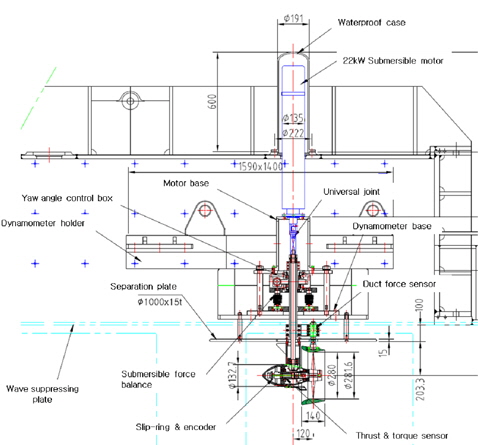
Fig. 8은 터널 시험부에 설치된 아지무스 추진기 및 동력계 등을 나타낸 배치도이다. 아지무스 추진기를 작동시키기 위하여 터널 상부에 22kW 수중모터를 설치하였으며 추진기 축과의 정렬 및 힘전달을 원활하게 하기 위하여 universal joint를 수중모터와 추진기 수직축 사이에 장착하였다. 터널의 상판(흘수판) 위에 설치되는 3분력계 안에는 추진기의 y축에 대한 회전을 가능하게 하는 yaw 각도 제어박스가 내장되어 있다.
Fig. 9는 터널 시험부에 설치된 아지무스 추진기 및 덕트 등을 보여준다. 아지무스 추진기와 흰색의 상판(흘수판, wave suppression plate) 사이에 원형의 경계판(separation plate)이 보이는데 이는 추진기에 의한 유체 흡입 효과를 실제 선박 상태와 유사하게 모사하기 위하여 장착한 것이며 시험부 상판에 의한 경계층 효과는 최소화하고자 하였다.
본 연구에서는 아래와 같은 시험 조건으로 아지무스 추진기에 대한 시험을 수행하였다.
- 추진기/덕트 : 각각 2종 - 추진기 유입 주유동 방향 속도 V = 0 ~ 6 m/s - 레이놀즈 수 Re = 0.9 x 106 ~ 1.2 x 106 - 터널 시험부 내 압력 P = 0.5bar ~ 대기압 - 터널 내 청수의 밀도 ρ = 1000 kg/m3
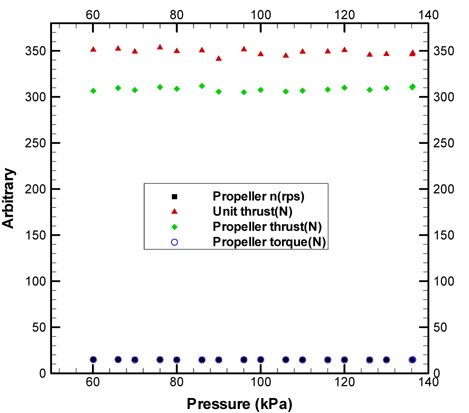
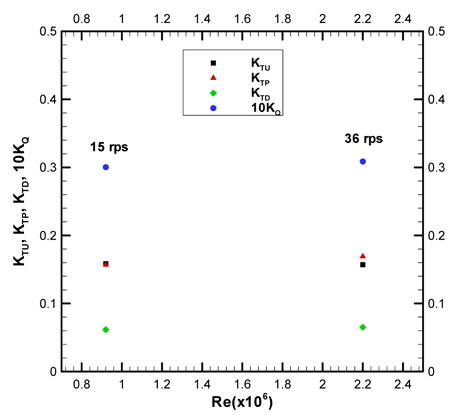
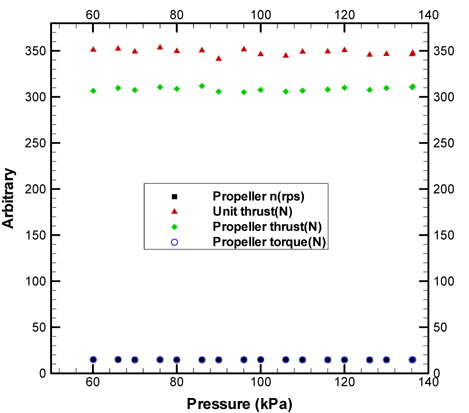
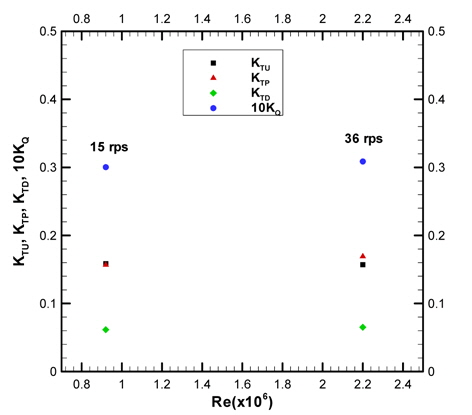
아지무스 추진기 성능시험을 수행하기 전에 레이놀즈 수의 변화에 영향을 받지 않는 시험 조건을 결정해야 한다. 시험 수행시 형성되는 레이놀즈 수는 유체 속도와 프로펠러 회전수에 따라 결정된다. 동일한 전진비에서 레이놀즈 수를 변화시켜 시험을 수행했을 때 계측 물리량의 변화가 적은 시험 조건을 찾고자 한다. J의 값이 0.4와 0.6일 때 레이놀즈 수 효과를 검토하였고 Fig. 10에 J = 0.6인 경우에 대한 결과를 표시하였다. 본 검토에서는 프로펠러 회전수와 프로펠러 유입 유체 속도를 변화시켜가며 프로펠러의 0.7R(R=프로펠러 반지름) 위치에서의 유입속도와 반지름 거리에 근거한 레이놀즈 수를 변화시켰다. 회전수가 15 rps일 경우 레이놀즈 수는 약 0.92 x 106 정도이며 36 rps일 경우 레이놀즈 수는 약 2.20 x 106 정도가 된다.
Fig. 10을 보면 15 rps에서 36 rps까지 변화하더라도 계측 물리량이 거의 유사한 모습을 보이고 있어 본 시험에서는 프로펠러 회전수를 고속회전에 따른 소음이나 진동이 적은 15 rps로 고정시키고 유속을 변화시켜 가며 각 전진비에서의 물리량들을 계측하였다. 해당 그림에서 KT는 추력계수를 의미하며 KQ는 토크계수를 의미한다. 또 아래 첨자 U는 unit을 의미하며 P는 프로펠러, D는 덕트를 의미한다. 각 계수의 정의는 아래와 같다.
KTP = T/(ρn2D4), propeller thrust coefficient KQ = Q/(ρn2D5), propeller torque coefficient ηP = J․KTP/(2πKQ), propeller efficiency KTU = FxU/(ρn2D4), unit thrust coefficient ηU = J․KTU/(2πKQ), unit efficiencyKTD = FxD/(ρn2D4), duct thrust coefficient ηD = J․KTD/(2πKQ), duct efficiency
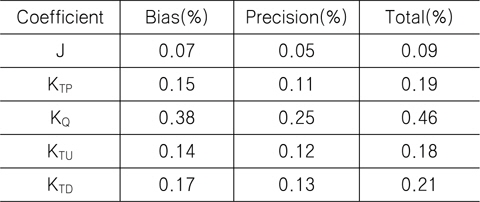
Table 2에 본 실험에서 계측한 각 계수들에 대한 불확실성 해석 결과를 표시하였다. 터널 용수의 밀도, 프로펠러 회전수, 프로펠러 직경, 터널 유속, 프로펠러 추력, 프로펠러 토오크, unit의 추력 등의 계측치 편향(bias) 오차들로부터 각 계수들에 대한 전체 편향 오차를 계산하였다. 편향 오차 외에도 다수의 반복 실험들을 통하여 우연(precision) 오차를 얻었으며 편향 오차와 우연 오차를 모두 고려한 최종 오차 값들을 Table 2에 표시하였다.
[Table 2] Uncertainty in each non-dimensional coefficient
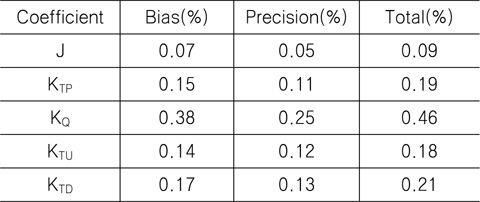
Uncertainty in each non-dimensional coefficient
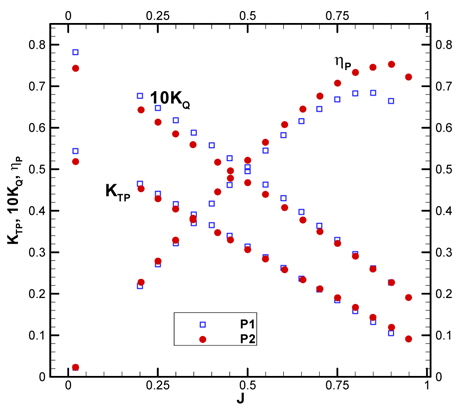
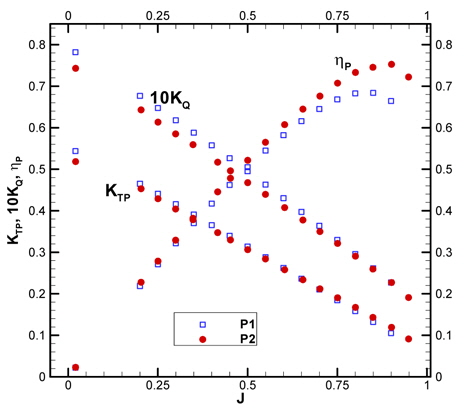
Fig. 11은 아지무스 추진기의 프로펠러에 대한 단독성능 실험 결과이다. 아지무스 몸체와 스트럿은 함께 설치되었으나 덕트는 제외한 상태에서 실험을 수행하였다. 프로펠러 추력의 경우 J = 0.7 이상에서 P2 프로펠러의 추력이 다소 높게 발생하였고 토크는 전체 J 범위에서 낮게 형성되었다. 이에 따라 P2 프로펠러 효율은 전체적으로 P1 프로펠러에 비해 높게 나타났다. Bollard(J = 0.05) 조건으로 접근함에 따라 P1과 P2 프로펠러들은 서로 유사한 효율을 보이고 있다.
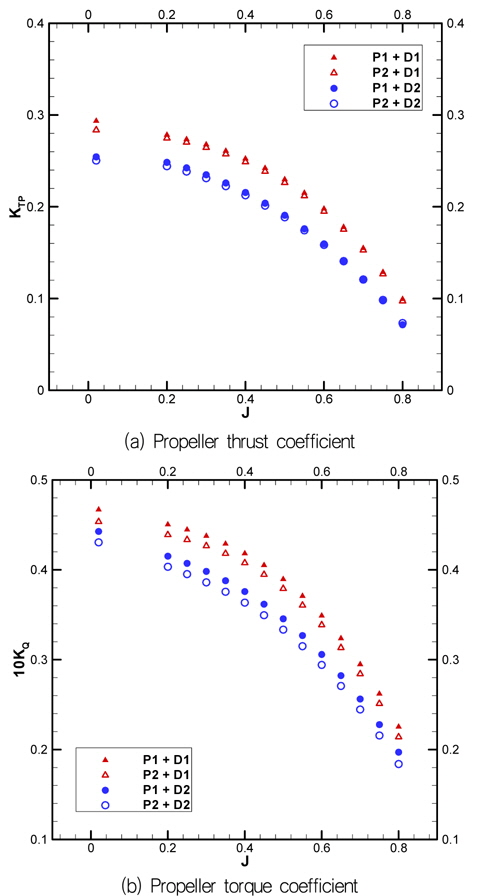
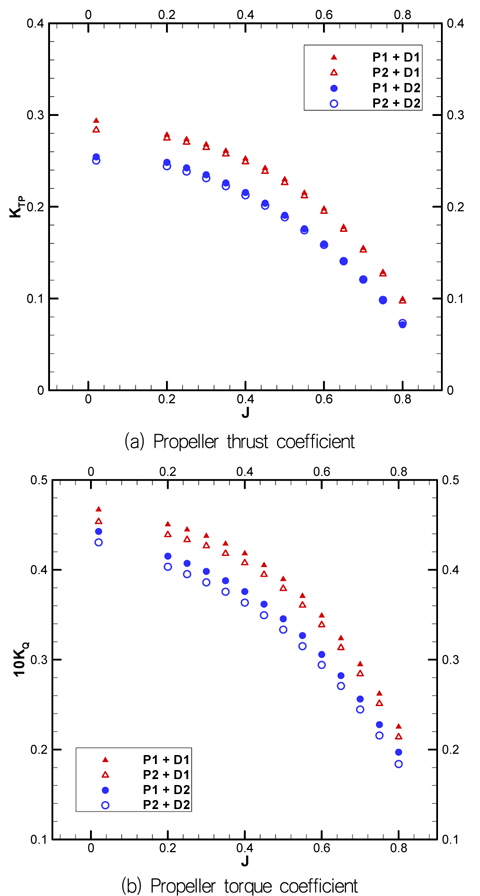
Fig. 12는 아지무스 추진기의 단독성능 실험 결과이다. 아지무스 몸체 및 스트럿, 프로펠러와 덕트가 함께 있는 상태에서 시험을 수행하였다. 총 4 종류의 프로펠러-덕트 조합에 대해서 고려하였는데 프로펠러 추력의 경우 P1과 P2의 추력은 서로 유사하나 덕트의 효과에 의해 D1 덕트의 조합에서 D2 덕트 조합보다 큰 프로펠러 추력이 발생하였다. 그러나 추력이 증가함에 따라 D1 덕트 조합에서 프로펠러 토크도 유사한 비율로 증가하였으며 P2 + D2 조합에서 가장 낮은 프로펠러 토크가 발생하였다.
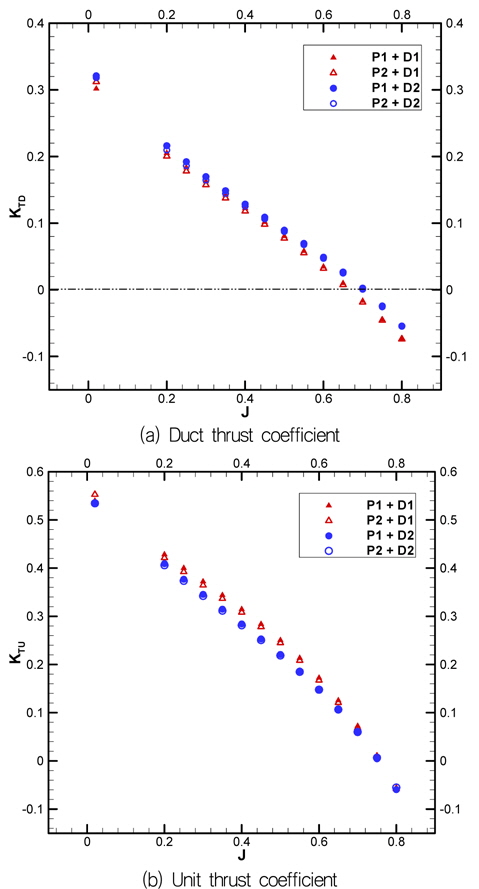
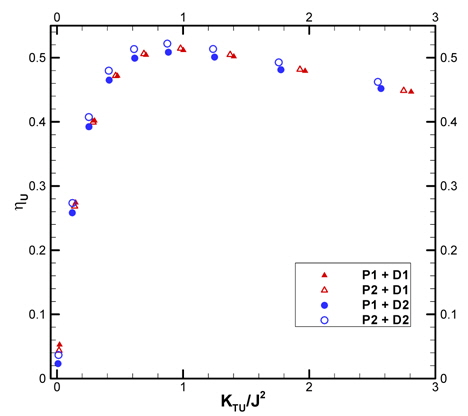
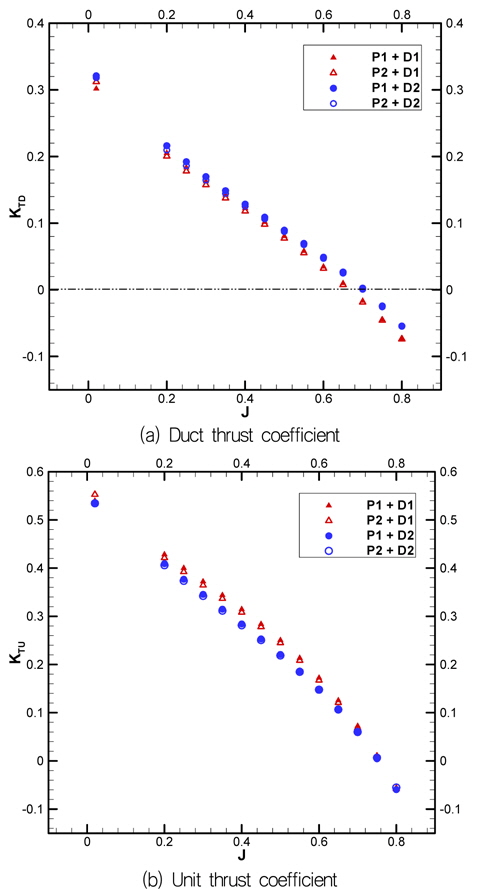
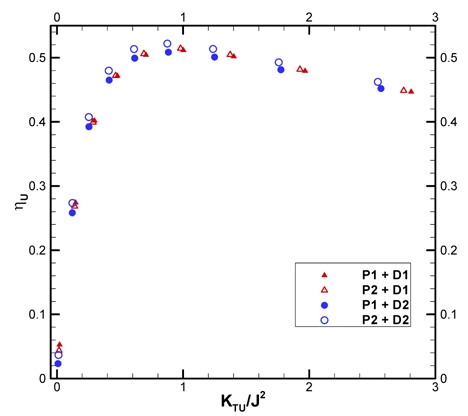
덕트 추력의 경우 Fig. 13(a)에서 보는 바와 같이 전체 J 영역에서 D2 조합의 추력이 D1 조합의 그것 보다 크게 발생하여 D2 덕트의 영향이 더 긍정적으로 나타남을 알 수 있다. 아지무스 unit의 추력을 보면(Fig. 13(b)), D1 덕트가 설치될 경우 unit의 추력이 D2 보다 다소 증가하였음을 알 수 있다. 그러나 아지무스 추진기에서 동일한 추력이 발생한다는 가정하에 아지무스 unit의 효율을 살펴 보면(Fig. 14) P2 + D2의 조합을 제외하고 나머지 3개의 조합들은 서로 유사한 unit 효율을 보여주고 있으며 P2 + D2 조합에서 가장 높은 효율이 발생하였다. 비록 D1 덕트에 의해 unit의 추력이 다소 증가한다고 할지라도 D1 덕트와 프로펠러 사이의 상호작용에 의해 프로펠러의 토크가 크게 증가하므로 Fig. 13(b)와는 다른 결과가 나타났다.
본 실험 결과를 통하여 날개끝의 코드길이가 작아지는 전형적인 프로펠러의 경우 덕트의 형상이 바뀌어도 아지무스 unit의 효율에 큰 영향을 주지 않았음을 확인하였다. 덕트 프로펠러에 적합한 카플란 형태의 프로펠러 P2의 경우, 앞날이 들린 단면을 갖는 D2 덕트에 대해서 3 ~ 4%의 효율 증가를 보였다. 이러한 결과를 통하여 아지무스 추진기에 카플란 형태의 프로펠러를 취하는 것이 바람직하며 덕트의 단면은 앞날이 다소 들린 형태가 아지무스 추진기 효율 측면에서 장점이 있을 것으로 예상되었다. 그러나 본 연구에서 사용한 프로펠러와 덕트 형상들은 수 많은 조합 중의 일부로서 더 자세한 연구를 통하여 아지무스 추진기에 적합한 프로펠러와 덕트 형상을 추적하는 후속 연구가 필요하다.
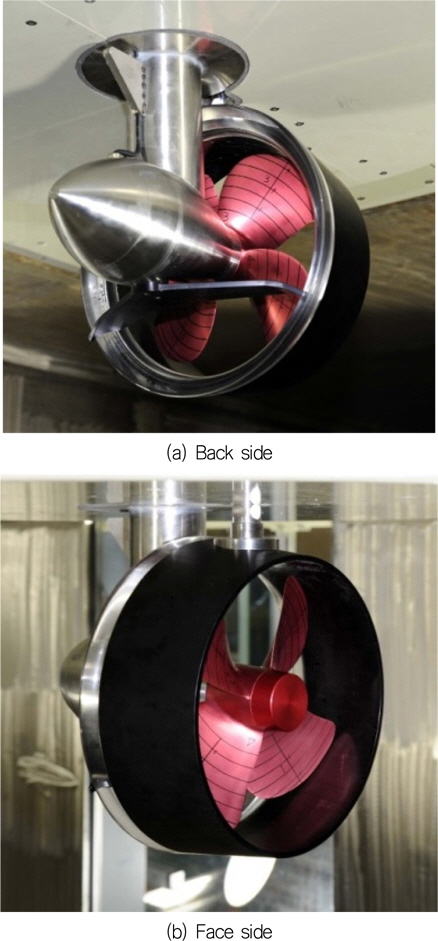
마지막으로 본 연구에서 unit 효율이 가장 높게 나타난 P2 + D2 조합에 대해서 최종적으로 캐비테이션 성능을 살펴 보기로하였다. 대형 캐비테이션 터널에서 수행한 캐비테이션 관찰은 bollard(J = 0.05)와 transit(J = 0.5) 조건에서 수행되었다. 각 운항 조건에서 프로펠러 회전수에 기초한 캐비테이션 수는 bollard와 transit에서 각각 4.13, 3.48이었다. 캐비테이션 수 σn의 정의는 아래의 식과 같다.

상기 식에서 P는 터널 시험부에서의 정압이며 Pv는 청수의 증기압을 의미한다.
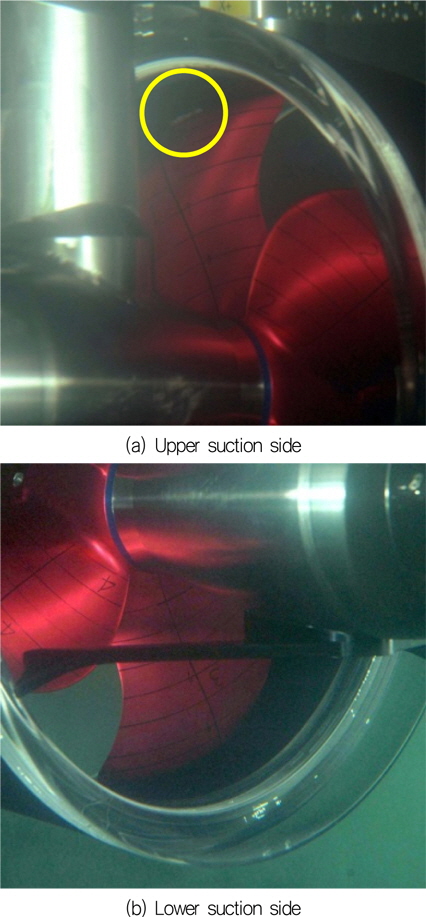
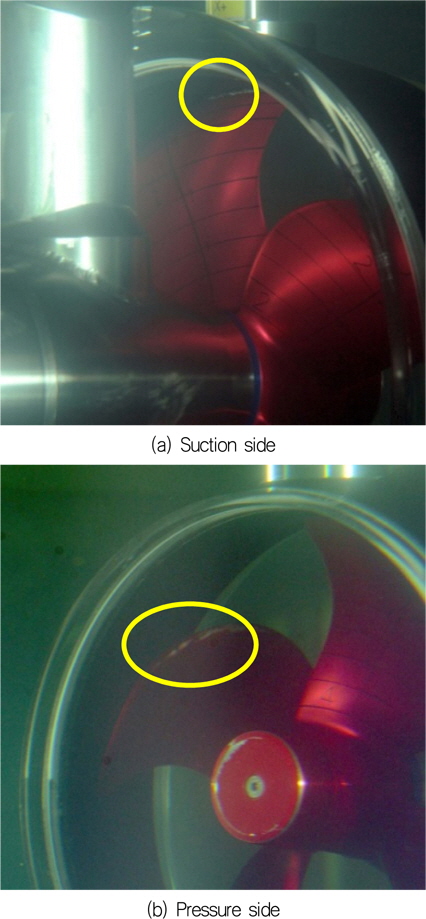
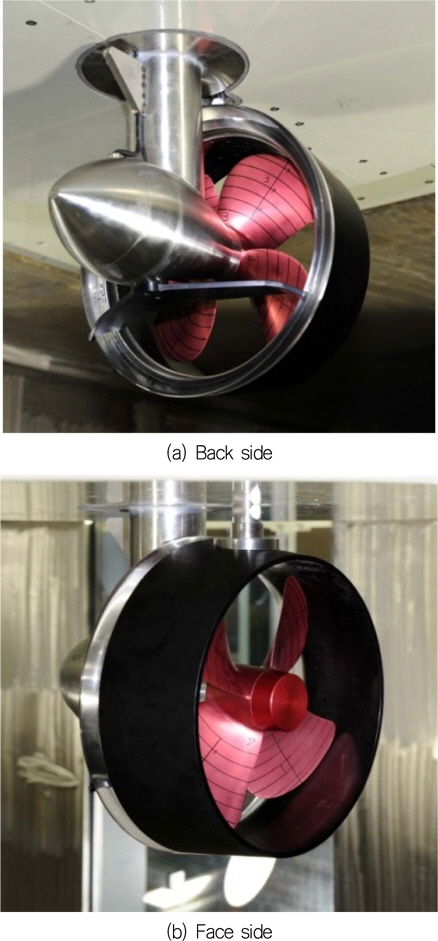
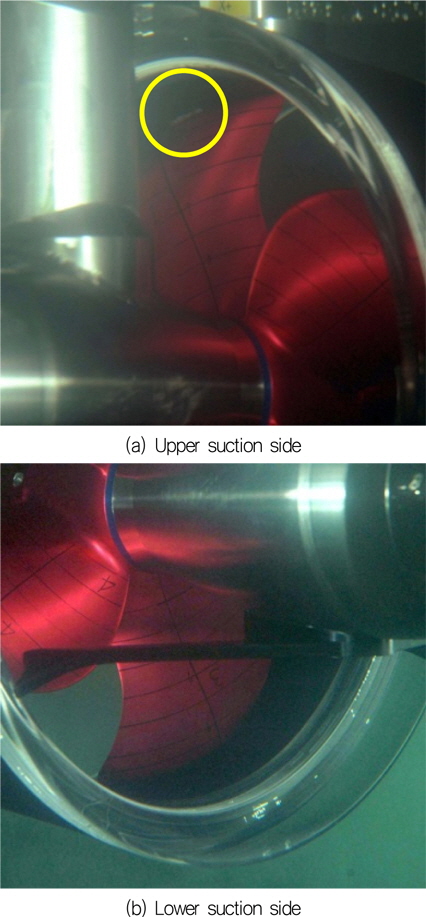
캐비테이션 관찰은 Fig. 15에서 보는 바와 같이 프로펠러의 흡입면(back side)과 압력면(face side)에서 수행되었다. Bollard 조건에서는 Fig. 16과 같이 상반부 프로펠러 흡입면 날개의 앞날끝과 덕트 표면 사이 간극(gap)에서 캐비테이션이 간헐적으로 발생하였으나 하반부 흡입면 날개와 압력면에서는 캐비테이션이 발생하지 않았다. 흡입면의 경우 프로펠러 전방에 위치한 스트럿의 영향으로 -30° ~ 30° 사이에서 캐비테이션이 발생하였다.
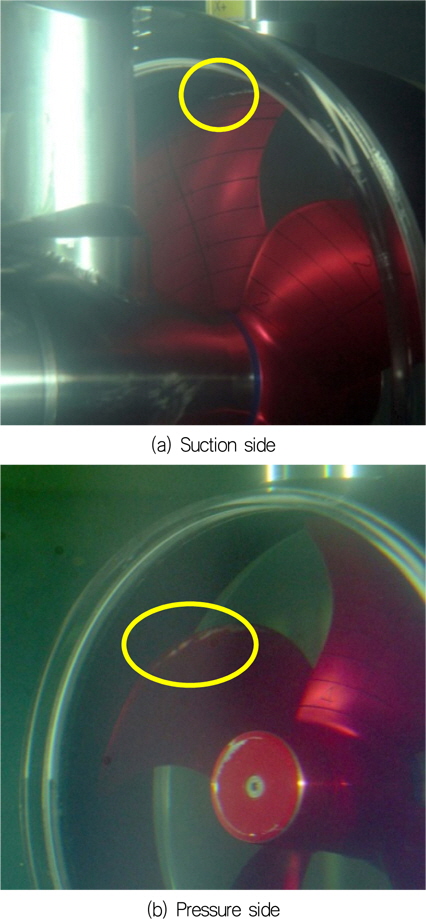
Transit 조건에서는 bollard 조건과 유사하게 상반부 흡입면 날개의 앞날끝과 덕트 표면 사이 간극에서 캐비테이션이 간헐적으로 발생하였고 프로펠러에 유입되는 유속이 증가함에 따라 상반부 압력면 날개의 앞날끝에서 캐비테이션이 Fig. 17과 같이 간헐적으로 발생하였다. 프로펠러 전방에 위치한 스트럿에 의해 bollard 및 transit 조건에서 모두 흡입면 캐비테이션이 발생하였다. 특히 transit 조건에서는 스트럿이 비균일한 후류를 발생시키 므로 프로펠러 흡입면에서 간헐적이면서도 강한 캐비테이션이 발생하였다. Transit 조건에서는 bollard 조건에 비해 상대적으로 고속 유동이 프로펠러로 유입되므로 압력면 캐비테이션이 나타났으며 관찰이 가능했던 회전각 중 약 180° ~ 360° 범위에서 캐비테이션이 발생하였다.
아지무스 추진기는 그 특성상 bollard와 transit 조건 모두에서 운용되어야 하므로 원하지 않는 압력면 캐비테이션의 발생을 억제하기 위해서는 스트럿의 영향을 고려한 세심한 프로펠러 설계작업이 필요하다. 아울러 덕트와 프로펠러 앞날끝 사이에서 나타나는 간극 캐비테이션을 저감 또는 방지하기 위하여 앞날끝 주변의 단면에 변화를 주는 등의 추가 연구가 필요하다.
본 연구에서는 아지무스 추진기의 프로펠러 및 덕트에 대하여 단독시험 동력계를 설계 및 제작하고, 추진기 모형을 실제 크기의 1/15로 제작하였다. 또한 제작된 동력계와 모형들을 대형 캐비테이션 터널의 시험부에 설치하고 프로펠러 및 덕트의 다양한 조합에 대한 단독 성능시험을 수행하였으며 최종 설계 프로펠러에 대한 캐비테이션 특성을 조사하였다. 아지무스 추진기의 덕트는 추력을 발생시켜 아지무스 추진기의 추력 향상에 기여할 수 있으나 프로펠러와의 상호 작용을 통하여 프로펠러의 추력 및 토크를 증가시켜 아지무스 추진기 unit의 효율에 영향을 미칠 수 있으므로 덕트 단면 및 형상에 대한 추가 연구가 필요하다. 또한 프로펠러 전방에 위치한 스트럿이 bollard 및 transit 조건에서 아지무스 추진기의 캐비테이션 성능에 영향을 미칠 수 있으므로 수치해석이나 모형시험 방법을 이용하여 스트럿의 형상을 최적화하는 연구도 수행되어야 한다.