Since radar is an electromagnetic sensor, its inherent capability is in all-weather and day or night operation, and thus its application is recently closing to our living environments, such as medical imaging, as well as urban radar for security and safety. As the modern radar technology has rapidly been grown, it has been becoming feasible to be easily implemented for the multifunctional and high performance radar. However, conventional fixed purpose radar system development still requires long development cycle and high cost because of the dedicated application in a certain radar environments. This makes the radar development difficult to the users’ applications for multipurpose, high performance, small size, and low cost. In order to overcome these constraints, software defined radar (SDR) was introduced for the multifunctional system where most of the hardware processing, like waveform generation and up and down conversion are performed by software. Software defined radar has many advantages such as a multipurpose system, the ability to re-using the hardware, ease of implementation of signal processing algorithms, faster development and cost reduction.
Early SDR was developed using field programmable gate array (FPGA) and a digital signal processor (DSP) for target distance detection [1,2]. The Universal Software Radio Peripheral (USRP) which is developed at a low cost is one of the most well-known SDR platforms. The first application of USRP was applied to perform target detection [3]. However the USB interface between the host PC and processor module limit the system performance [4-7]. The most problems in development of SDR platform are related to narrow bandwidth and low speed interface.
This paper presents a broad overview of software defined radars. The concept and technology trends are presented in Section II. The SDR system which is being designed by Korea Aerospace University is discussed in Section III. The applications of SDR are explained in Section IV, and finally, conclusions are provided in Section V.
II. OVERVIEW OF THE SOFTWARE DEFINED RADAR SYSTEM
1. Concept of Software Defined Radar
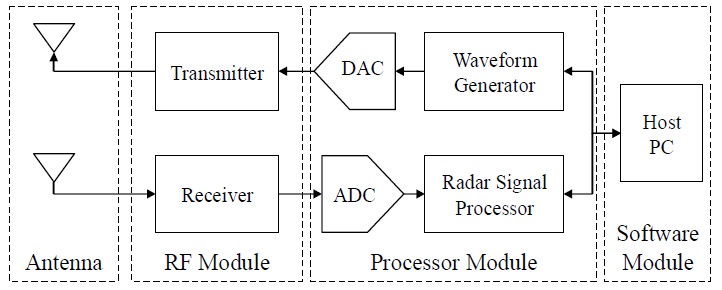
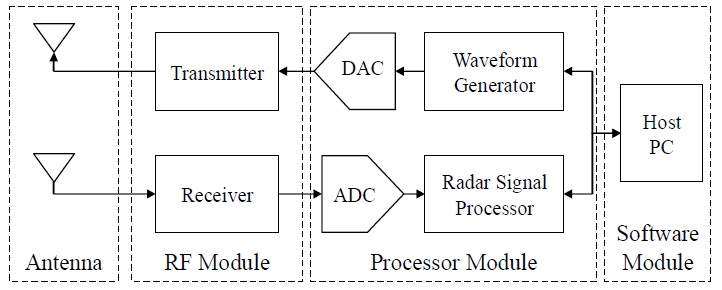
The SDR system consists of a general RF module and a reconfigurable software module. Radar components, such as mixers, filters, modulators, demodulators, and detectors, typically have been constructed in the hardware. The components are implemented using software on a PC, DSP or FPGA in SDR. The basic construction of SDR is presented in Fig. 1.
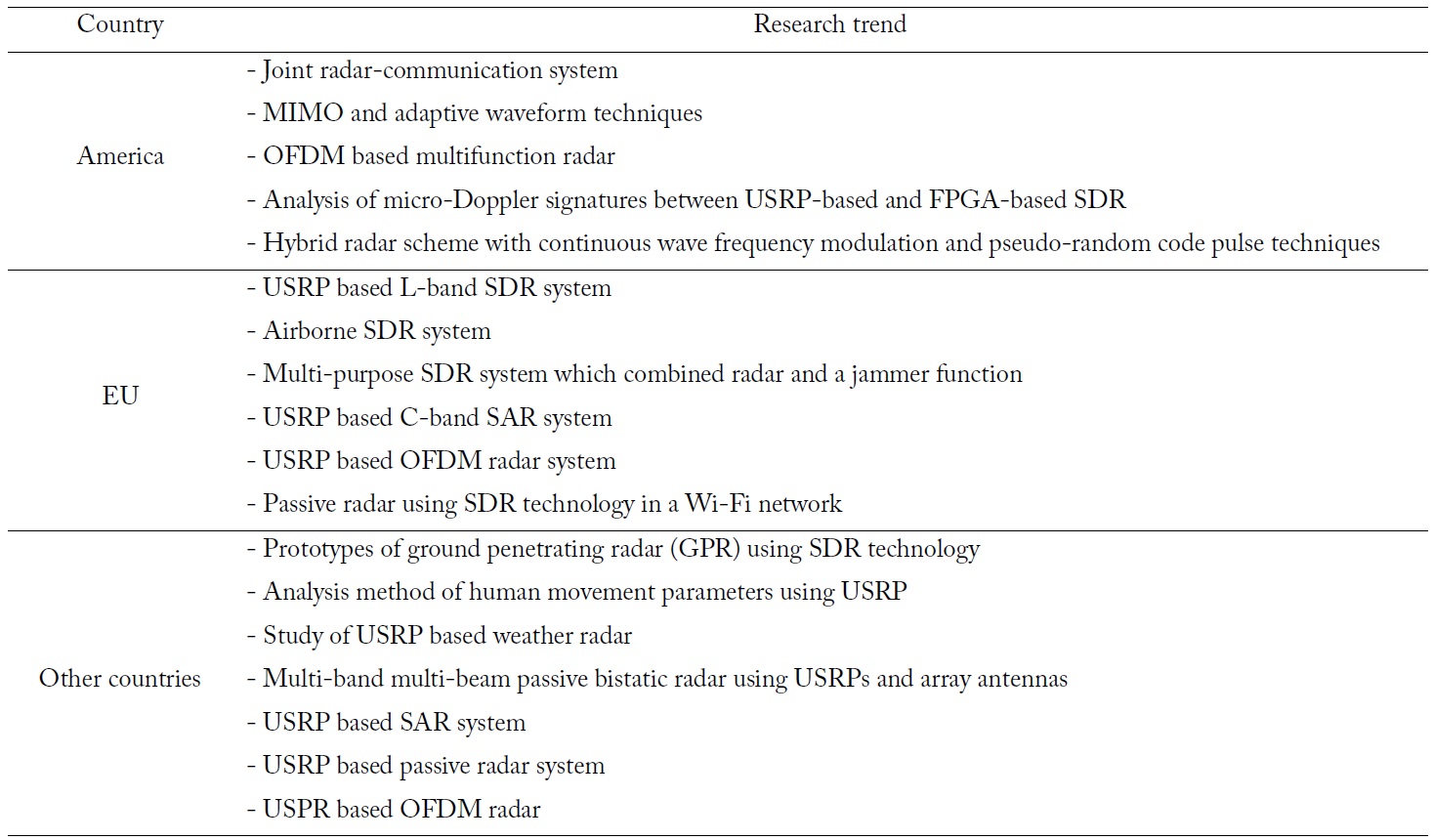
The SDR system can be applied to various areas so that advanced countries are studying and developing the system. A technology trend of the SDR system in each country is summarized in Table 1.
[Table 1.] Summary of SDR trend
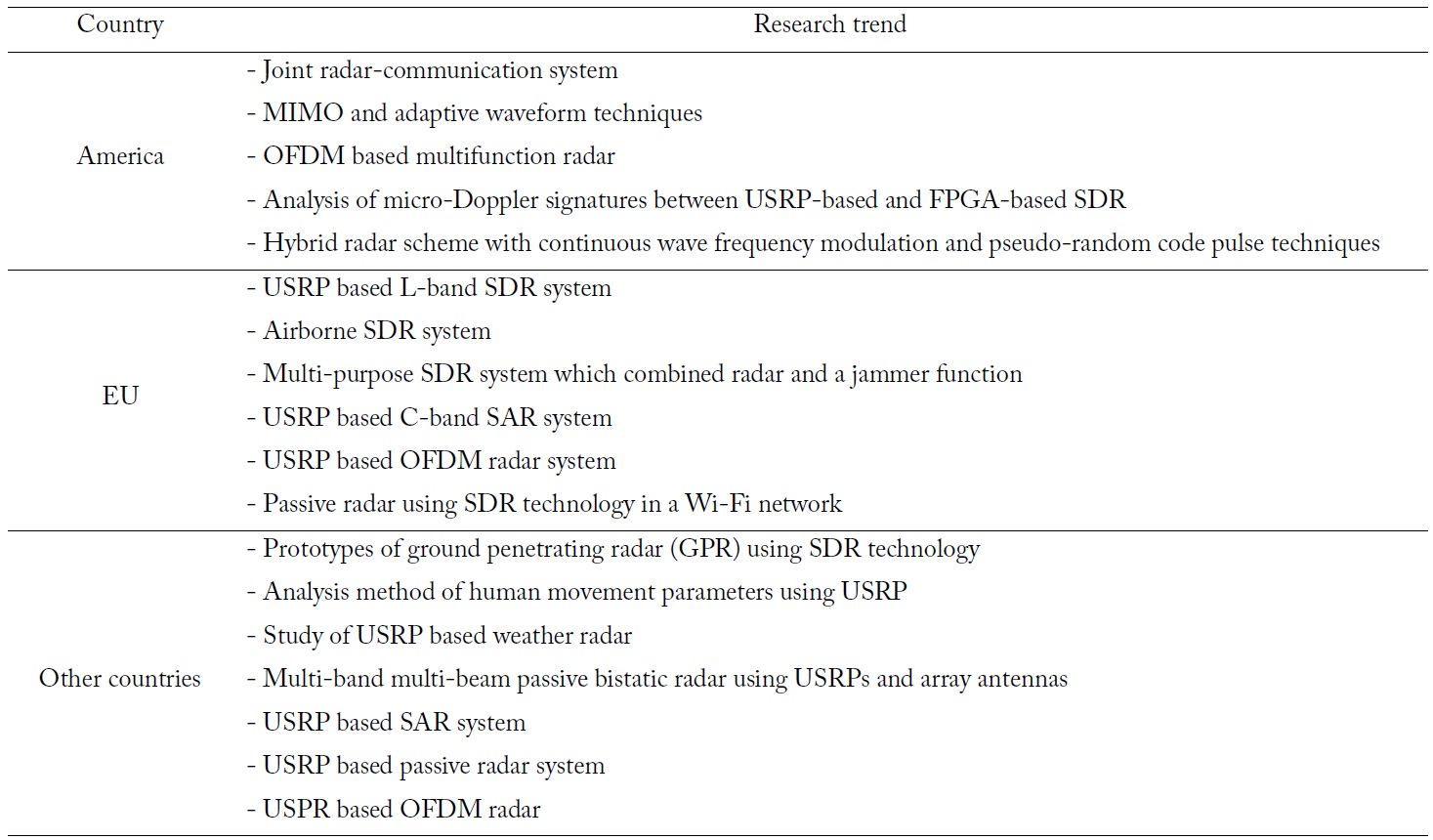
Summary of SDR trend
2.1 America
Rossler et al. [8] demonstrated a joint radar-communication system which uses wideband digital communication signals to simultaneously interrogate a scene as radar while communicating range-Doppler maps resulting from previous interrogations. Frankford et al. [9] greatly simplified the evaluation of MIMO and adaptive waveform techniques through the use of the OSU SDR, a flexible self-developed radar platform. Furthermore, this radar operated at two frequencies simultaneously, allowing for dual frequency human measurements [10]. Garmatyuk et al. [2] implemented orthogonal frequency-division multiplexing (OFDM) signal coding and system architecture to achieve radar and data communication functionalities. Therefore, the resultant system could be used for range measurements, radar imaging, and data communications. Ancortek Inc. investtigated the use of SDR to analyze the micro-Doppler signatures in two kinds of platforms, USRP-based SDR and FPGA-based SDR. They tested each platform in CW and FMCW modes to study micro-Doppler characteristics of human gaiting as well as helicopter rotor blades [11].
In Canada, Zhang et al. [1] proposed a hybrid radar scheme with continuous wave frequency modulation and pseudorandom code pulse techniques. The system showed the ability to obtain high precision information concerning the velocity of a vehicle, the distance, the direction and other information useful to improve the security in the automotive field.
2.2 EU
In Italia, Costanzo et al. [12] adopted a USRP to design a high resolution L-Band SDR system, which was tested which was tested in outdoor s and showed accurately the correct target position with the predicted slant-range resolution equal to 6 m. They also discussed the synchronization issues existing between a received and a transmitted signal when a USRP is considered [3]. They proposed a multiband SDR based on the OFDM technique for the accurate detection of soil discontinuities, taking into account also the dispersive behavior of media [13].
In Poland, the maritime patrol radar was made with an airborne SDR system that could switch between different modes. The algorithm was loaded on a FPGA by means of a PC [14], and a multi-purpose RF system which combined radar and a jammer function on the same hardware was demonstrated [15]. Lately, Gromek et al. [16] tried a concept of USRP as a hardware platform for FMCW synthetic aperture radar in Cband.
In Germany, Braun et al. [6] presented a measurement testbed for OFDM radar which uses USRPs as the front-ends. The resultant system required little power and could thus be easily installed in vehicles to perform measurements for car-tocar or car-to-infrastructure applications. In the UK, Woodbridge et al. [17] reported the development of wireless passive radar using SDR technology in a Wi-Fi network.
2.3 Other Counties
In Australia, Ralston et al. [18] explored the potential of SDR technology to provide flexible and low-cost subsurface radar prototypes for the ground penetrating radar (GPR) community. In Norway, a low-cost radar platform was designed to extract human movement parameters in the presence of indoor multipath and clutter. This platform offered the opportunity of realizing low-cost experiments at an expedited pace and low budget [19]. In Indonesia, Prasetiadi et al. [20] proposed a simple delay compensation system to solve USRP’s additional delay problem by employing a constant signal transmitted before the FMCW signal. Moreover GNU Radio based software defined FMCW radar was studied for weather surveillance application [21]. In Saudi Arabia, the design and development of multi-band multi-beam software defined passive bistatic radar were demonstrated. This system could operate at any carrier frequency, bandwidth and signals over a large frequency spectrum up to 6 GHz, with transmitters of opportunity at spatially-diverse locations [22]. In India, an attempt was made to explore the means to use a SDR to implement a basic radar system and then synthetic aperture radar [4]. In South Africa, a prototype passive radar system that utilized FM radio transmitters for target detection was presented [23]. In Singapore, OFDM radar for open doorway detection was implemented using an USRP [24].
III. MULTI-BAND AND MULTI-MODE SDR RADAR
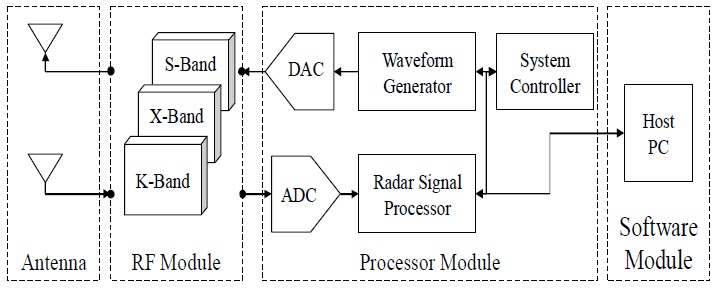
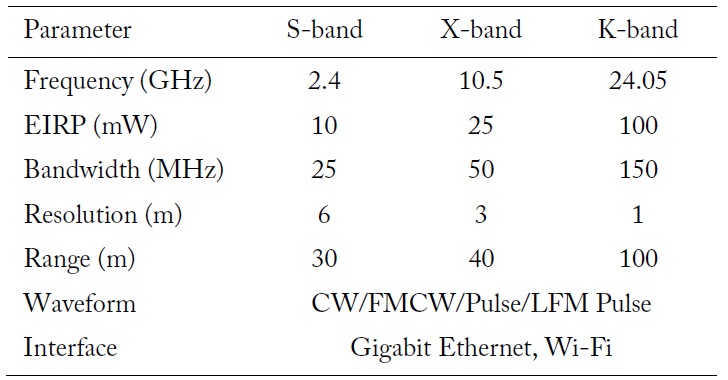
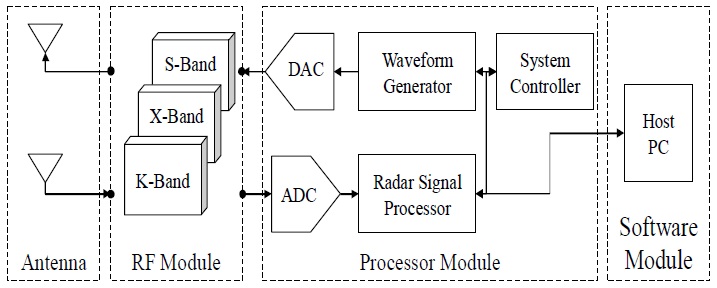
The project, SDR Radar Sensor Platform Development, is in progress at Korea Aerospace University (KAU). The main goal is the development of the multiband and multimode SDR platform in ISM bands. The KAU SDR Model (KSM) consists of replaceable antenna and RF modules at multiband of S-, X-, and K-band, signal processor module, and software module as shown in Fig. 2. The RF modules are developed to enable the replacement of each operation frequency. RF modules modulate analog signals and radiate the RF signals through the antennas. The received echoes are transferred to a signal processor module through an RF module. The processor module generates various waveforms, such as continuous waves (CW), frequency-modulated continuous wave (FMCW), pulse, and linear frequency modulation (LFM) pulse. These waves are transferred from the computer module and sent to the RF module through a digitalanalog converter (DAC). The selection functions of waveforms lead to perform multimode SDR. The host PC performs the post processing, such as detection and tracking, and displays results after data are processed in the signal processor module. The host PC can be used to control the hardware system and waveform settings. The software library provides support for pushing and pulling data to and from the signal processor, for changing the waveform and/or parameters of the SDR and for performing radar signal processing. The key specification of the system is presented in Table 2.
[Table 2.] KAU SDR model (KSM) system specification
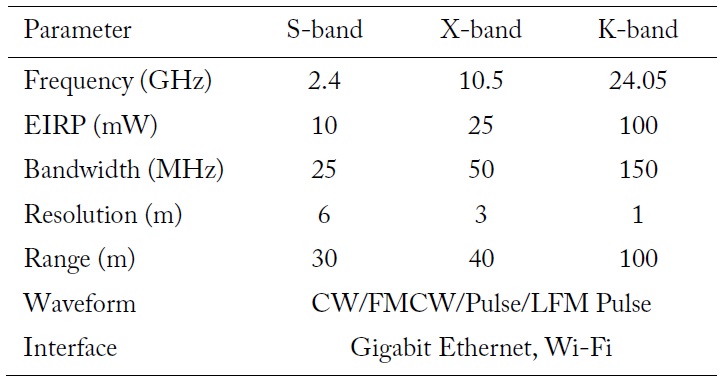
KAU SDR model (KSM) system specification
KSM is a bistatic radar system. The various types of antennas such as horn, patch, and substrate integrated waveguide are being designed and will be developed in S-, X-, and K-bands. It will be used to apply in broad fields.
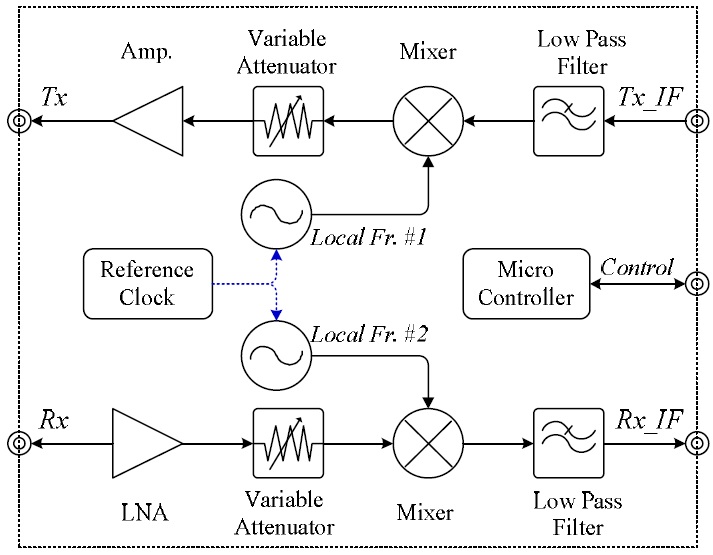
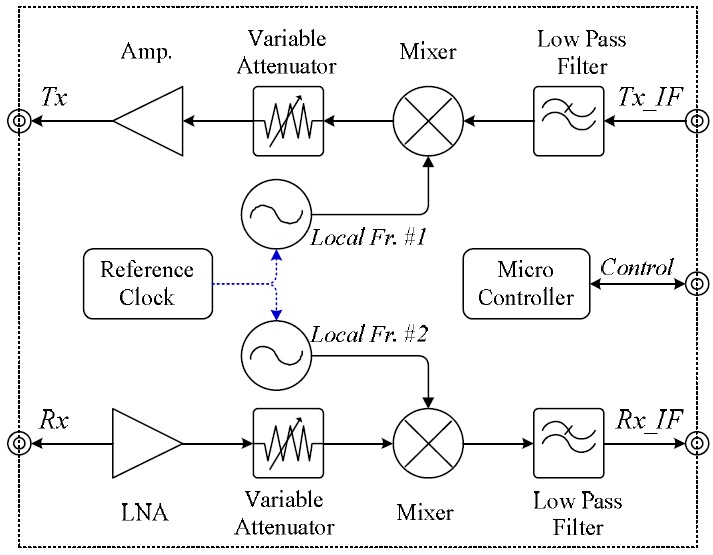
The RF module consists of a transmitter and a receiver and three models will be developed to operation in S-, X-, and Kbands. The transmitter converters a waveform from intermediate frequency (IF) to RF, and transfers to the antenna through the power amplifier. The receiver amplifies low noise of the echo signal from the antenna, and performs down-conversion. Fig. 3 shows a block diagram of the RF module in the SDR system. Local frequencies use the same reference clock because of system coherence. The controllable parameters of the software module are transmitting power, receiver gain, and pulse repetition frequency.
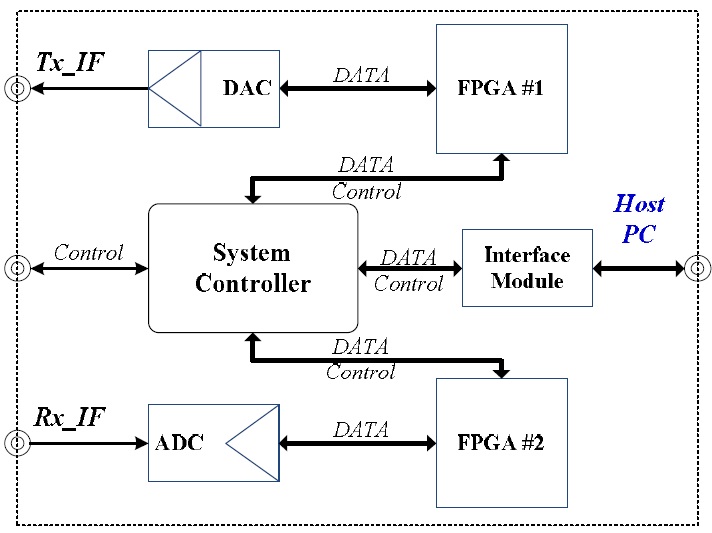
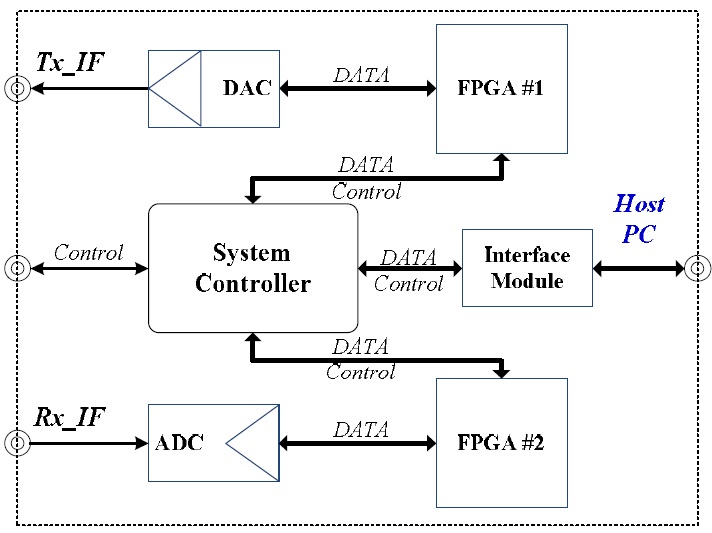
The major missions of the processor module as shown in Fig. 4 are waveform generation, signal processing, and data transmission. Waveform generation is performed by FPGA and DAC. The type of waveform is controlled by the host computer. FPGA and DSP process the digital converted signals by analog-to-digital convertor (ADC). Digital down conversion and Hilbert transformation are the basic procedure. Also, some pre-processing, like as pulse compression and de-chirp, will be performed according to waveform. Algorithms and procedures are adjusted by the host computer. The various types of data are generated in the processor module. Raw data can be saved for algorithm evaluation, and display data will be transferred to the host computer. The data in the processing steps can be delivered by the system controller as well. The processor module is connected to the host computer via Gigabit Ethernet interface.
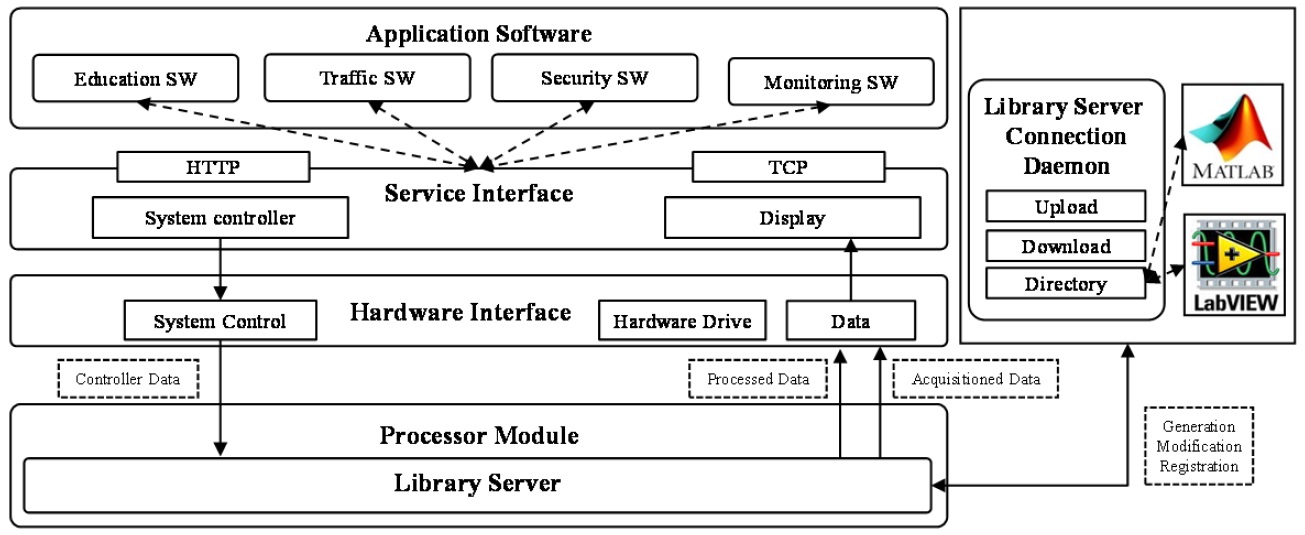
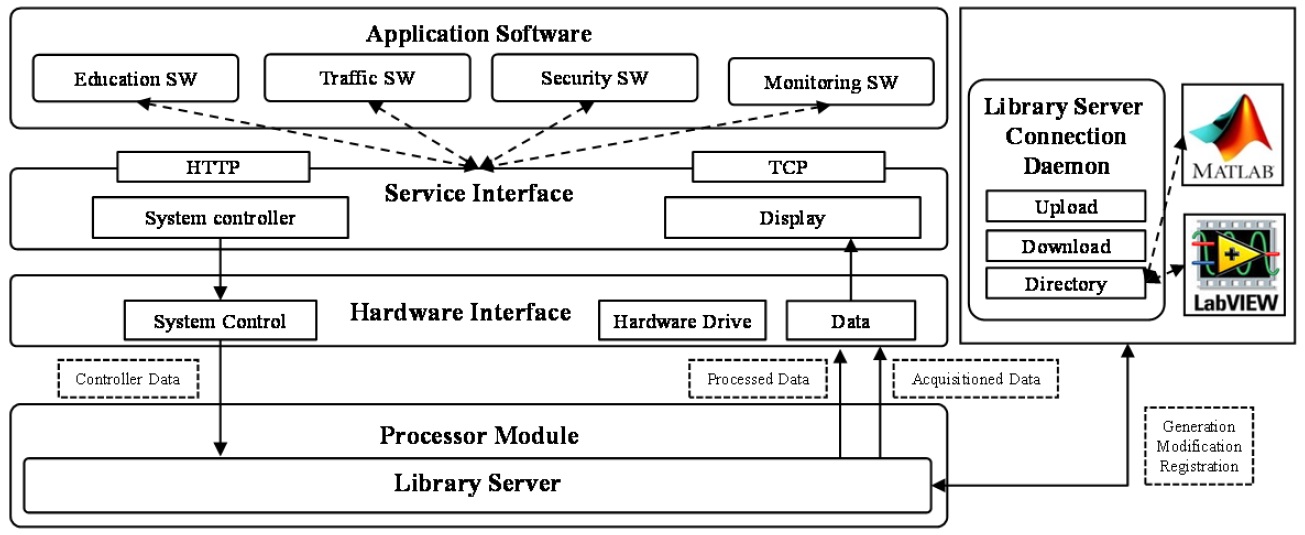
The software module was developed based on open application programming interface (API) by applying MATLAB and LabVIEW as shown in Fig. 5. The open software module consists of a hardware interface, service interface, library connection daemon, and four software applications. The HW interface is used for data acquisition and processing of the control signal. The service interface provides information of application software and HW interface, control, and displays API function. Library server connects commercial tool like as MATLAB and LabVIEW with processor module. The application software, such as education, traffic, security, and monitoring software, is a separate software platform for application of SDR. Since the signal processing simulates algorithms, the software libraries support results in a test on which algorithms for raw data can be evaluated. The processed results can be used to enhance the performance of the signal processing algorithms.
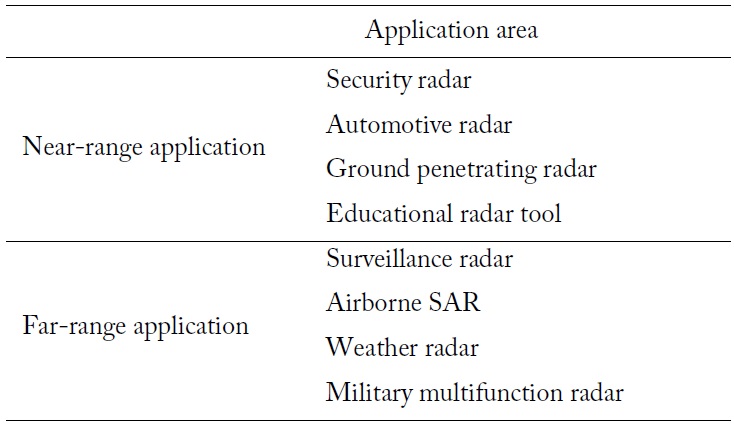
SDR has many advantages such as the possibility to create multipurpose radar, the possibility to re-use the same hardware, an easier implementation of advanced signal processing algorithms, faster development and a reduced cost. Based on the above potential of SDR, its application areas in Table 3 are follows: human motion detection, automotive navigation, GPR, and educational tools are considered near-range applications. Military multi-function radar, a passive coherent location (PCL), an aerial observation using SAR, and weather surveillance are considered far-range applications.
[Table 3.] SDR system applications
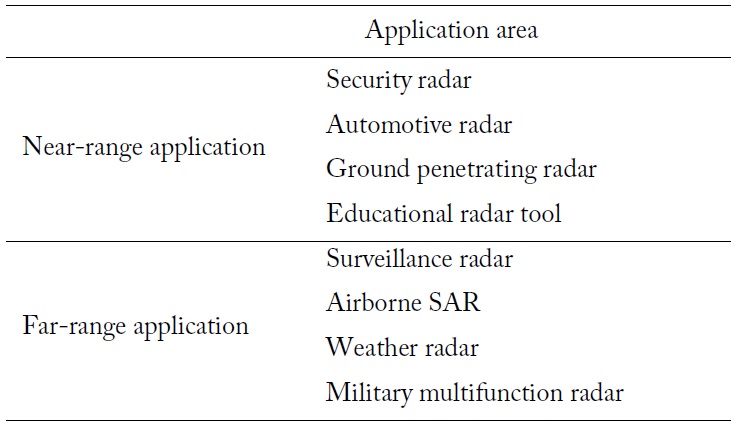
SDR system applications
In a human motion detection area, SDR can be exploited as the micro-Doppler radar system for detecting and analyzing the various human gestures. Such a sensor system with a compact size can be accepted as a competitive technology in the camera and IR technology-centered sensor market, due to the unobtrusive detection and low privacy risk. This system is used to check the health conditions of the elderly and prevent falls and other accidents by analyzing their activity profile in the healthcare and wellness domain [19].
In an automotive navigation application, SDR can realize a hybrid radar scheme by the combination of radar and communication function. The two functions can be carried out in turns by switching modes or concurrently through a special waveform, such as OFDM [6,23].
In a GPR context, SDR is applicable as multiband radar for accurate detection. For the multiband operation, the SDR concept provides strong advantages with respect to classical radars, due to the easy software implementation of all required hardware modules and the easier integration into a compact system of signal processing operations [13].
In an educational tool area, SDR can be utilized as an effective teaching tool for students or trainees. From the viewpoint of low cost and high flexibility, SDR systems will be introduced as a practice tool in radar engineering curriculums, for example as the role of SDR technology in DSP and communication theory curriculum [25].
In a PCL area, SDR is used for realizing passive radars. Even though each illuminator of opportunity has different waveforms, SDR can reconfigure the receiver system to the favorable signal in each radio environment. The illuminators of opportunity can be divided into two main classes: analogue signal like FM radio, analogue TV or digital signal like DVB-T, UMTS, and Wi-Fi [21].
In an aerial observation area, SAR system can be developed through the SDR technology. This system can easily be mounted in a private setting by hobbyists or even by academics on small aircrafts, due to the compact size and light weight [16]. In a military equipment area, SDR enables the multifunction RF payload to be installed in limited-space aircrafts, especially UAVs [26]. They include detection mode like GMTI, SAR, ISAR, weather surveillance, communication mode, and EW mode. In a weather surveillance area, SDR has cost reduction merits for building a weather radar network [13].
This paper describes the overall concept and trend of software defined radar technology. For the advancement concept, the KSM is presented with the replaceable RF hardware, a common digital processor, radar processing algorithm library and open software platform. This multiband and multimode SDR radar can be applicable to the radar training education, traffic monitoring and safety, security, and surveillance.