Eco-friendly and sustainable seaweed biomass energy have been under the spotlight as the future of renewable energy. However, seaweed culture is primarily conducted inshore, with the research on offshore culture still in an early stage. For massive biomass production, a systematic engineering approach is required to devise offshore seaweed culture facilities rather than the conventional empirical ones. To establish the fundamental behavior of seaweed culture facilities, the dynamic characteristics of a seaweed culture facility were analyzed in the study. For this purpose, numerical analyses of the seaweed culture facility (a frame type) were carried out by using the hydrodynamic simulation program ANSYS-AQWA. For the analysis, environmental loads were considered using the wave spectra and co-linear current; mooring variables were selected as parameters; and time domain analyses were carried out to acquire the time series responses and eventually the dynamic characteristics. Finally, the mooring performance was evaluated. It was found that the motion could be controlled by adjusting the buoyancy and mooring slope.
대량 양생된 해조류를 이용하여 연료를 생산하는 해양바이오에너지는 친환경적이고 태양력, 풍력과 달리 국토면적이 좁은 우리나라에서도 충분히 이용할 수 있다고 평가받고 있다(KMI, 2009). 그러나 종래의 해조류 양식기술은 바이오에너지 생산을 위한 대량 양식에는 적합하지 않다. 과거부터 해조류 양식이 경험에 의존하여 연안지역에 국한되었으며 식용과 미용의 목적으로 양식된 해조류는 바이오에너지의 원료로 쓰기에는 생산량이 부족하기 때문이다. 그리고 연안에서는 적조와 부영양화 같은 다양한 환경문제가 발생할 가능성이 높다. 따라서 해조류 바이오에너지 연료를 대량 생산하기 위해서는 외해 해조류 양식 기술이 필요하다.
로프와 부이만으로 이루어진 연승식(Longline type) 구조물이나 목재 프레임과 같은 경험적으로 이루어져 왔던 종래의 해조류 양식방식은 외해의 거친 환경조건에 취약할 수밖에 없다. 이에 바이오매스에너지 생산을 위한 해조류 양식은 종래의 경험적인 방식을 벗어나 공학적이고 체계적인 기술과 연구가 필요하다. 해조류 양식과 마찬가지로 과거 경험적 설계에 의존하던 어류 가두리 양식분야는 다양한 수치실험과 모형실험을 통해 최근 외해로의 진출이 활발하게 진행되고 있는(Fredriksson et al., 2005) 반면 외해 해조류 양식 시설의 동적 안정성에 관한 연구는 극히 미비한 실정이다. 따라서 해조류 대량양식을 위해서는 외해의 외력 조건에 견딜 수 있는 구조형식과 계류시설, 적지선정 연구 등이 요구되며 이 중 계류시스템은 그 형식에 따라 구조물의 거동이 지배적이기 때문에 선정 시 다양한 요인들이 고려되어야 한다. 또한, 파랑 중 양식시설의 동역학적 특성을 정확히 산정하여야 하고 계류변수에 따른 계류성능 분석을 위한 연구가 요구된다.
본 연구에서는 계류변수에 따른 계류성능 분석을 위해 수치 해석을 수행하고 해조류 양식시설과 계류시스템의 동적 특성을 분석하였다. 이를 위해 동수역학 해석 프로그램인 ANSYSAQWA를 사용하여 선정된 프레임형식 해조류양식시설모델의 수치 해석을 수행하였다. 파랑 중에서의 구조물과 계류시스템의 시계열 거동을 확인하기 위해 시간영역 해석(Time domain analysis)을 수행하였으며 계류변수에 대한 응답을 비교하기 위해 계류변수에 따른 케이스 해석이 수행되었다. 파랑 스펙트럼이 환경하중으로 적용되었으며 이에 나타난 불규칙 응답을 정성적으로 평가하기 위해 시계열 응답을 FFT(Fast fourier transform) 코드를 통해 스펙트럼으로 변환하여 계류성능 및 동적특성을 비교 분석하였다.
최근, 관련 소프트웨어와 하드웨어의 발달로 전산유체역학을 이용하여 해양구조물의 응답을 예측하는 연구가 가속화 되고 있다. 특히, 이들 연구는 적용사례단계에서부터 검증단계까지 부유체의 동적안정성 확보에 치중하고 있다(Nam et al., 2012; Jordán and Beltrán-Aguedo, 2004). 본 연구에서는 전산유체역학 프로그램인 ANSYS-AQWA를 이용하여 부유체의 일종인 해조류외해양식시설의 동적 특성을 파악하고자 한다. 이를 위한 이론의 정식화와 가정은 아래와 같다.
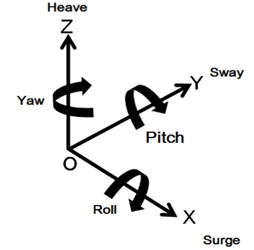
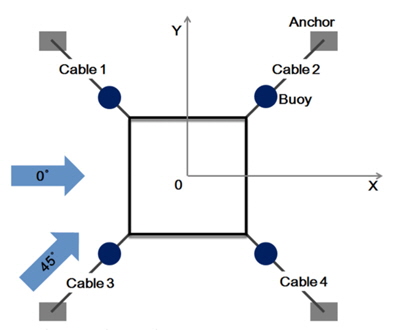
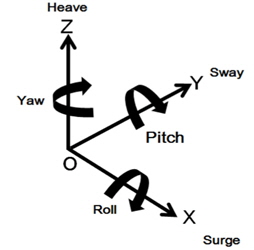
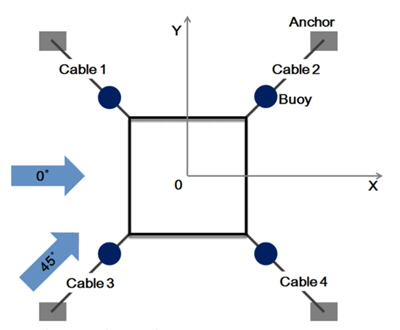
좌표계는 Fig. 1과 같은 공간고정좌표계를 사용한다.
ANSYS-AQWA는 3차원 선형 포텐셜이론을 기반으로 하고 있 다. 속도포텐셜 𝛷는 식 (1)과 같이 입사파(Incident wave)의 속도포텐셜 𝛷


여기서,
해조류 양식시설에 작용하는 주파수영역 하중을 계산하여 주파수영역 운동 성능을 해석할 수 있다. 해상의 부유 구조물의 선형 운동 방정식은 식 (3)과 같이 나타난다(Newman, 1997; Journee and Massie, 2001).

여기서,
선형입사파랑의 주파수에 대응하는 운동응답을 나타내는 진폭응답함수는 식 (4)와 같이 계산된다. 이 식에서 복소 운동진폭의 절대값|

시간영역 운동방정식은 주파수영역 운동방정식의 푸리에 역변환을 통해 얻어 질 수 있다. 시간영역 운동방정식은 식 (5)의 Cummins의 식과 계수들로 표현된다(Cummins, 1962).

여기서, (임펄스응답함수), τ는 적분변수, t는 시간변수이다.
ANSYS-AQWA의 해석에 사용되는 모델은 Design Modeler 모듈에서 모델링된다. 동수역학 해석에서는 구조물의 내부 부재를 제외한 면요소와 선요소가 사용되며 여기서 사용되는 요소의 기하학적 데이터는 실제 제원을 적용한 모델의 구조해석으로 얻어진 값을 사용할 수 있다(TSNE, 2011).
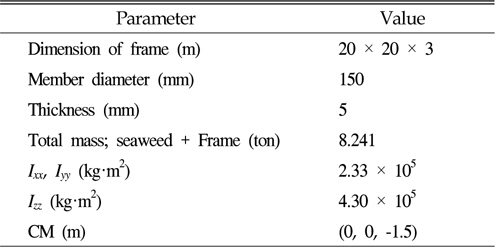
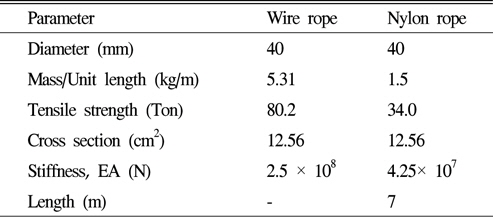
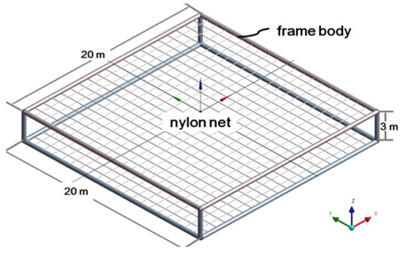
본 연구에서는 상부, 하부에서 해조류를 양생시킬 수 있는 사 각프레임을 대상 구조물로 선정하였다. 일반적인 해상의 프레 임구조물의 경우 원형프레임구조가 사각프레임구조에 비해 파 랑 중 더 유리한 동적특성이 나타나지만 대량양식이라는 목적 에 맞춰 확장성이 더 용이한 사각프레임을 대상 모델로 선정하 였다. 프레임부는 강관 부재로 구성되고 해조류 양생부(Curing unit)는 격자형식인 나일론 망(Nylon net)으로 이루어져있다. Fig. 2는 대상 구조물의 모델을 나타내며 모델의 제원은 Table 1과 같다. 본 연구에서 고려된 대상 해조류는 학명 Laminaria saccharina 다시마과에 속하는 대형 해조류이며 해조류의 성장 후의 질량을 모델에 적용시켜 해석을 수행하였다. 해조류에 의한 부가 질량은 Bela and Cornelia(2004)가 예비실험에서 제시한 기대치인 4kg/m으로 계산되었다. 본 해석에서의 적용된 해조류의 총 질량은 5.12ton이며 점 질량(Point mass)으로 나눠 적용하였다.
[Table 1] Details of hydrodynamic model
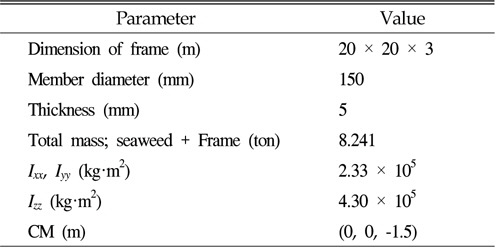
Details of hydrodynamic model
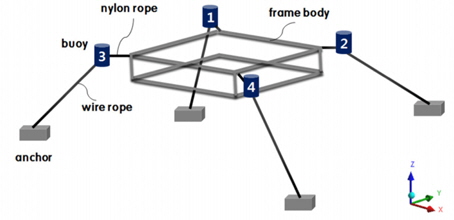
현수선(Catenary) 계류방식은 강한 외력이 존재하는 외해에서 큰 표류변위에 노출되어 있어 그물망이나 프레임에 마모되는 문제를 발생시킬 수 있기 때문에 해조류양식시설의 계류시스템 적합하지 않다. 본 연구에서는 표류 변위의 감소와 부유체의 운동이 유연하게 흡수될 수 있는 유연부이 계류시스템을 적용하였다. 유연부이 계류시스템은 나일론로프를 이용해 구조체와 부이를 연결하고 와이어로프를 이용해 부이와 앵커를 연결하는 구조이며 파력발전, 가두리와 같은 중소형 해양구조물을 대상으로 적용되었다(Lien et al, 1989; Lien et al, 1996; Shin and Hong, 2005; Kim et al., 2001; Kim et al.,2002).
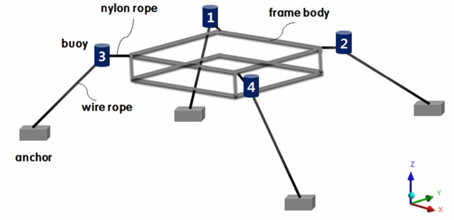
유연부이 계류시스템을 적용한 양식시설은 Fig. 3과 같이 나타낼 수 있다. 수중에서의 계류로프 중량과 부이의 부력의 차이, 경사각에 의해 계류로프의 초기 장력이 결정되며 하중에 의한 구조물의 운동에 따라 로프의 장력이 변화한다. 계류시스템의 모델링은 ANSYS-AQWA에서 수행되며 본 프로그램은 선형탄성요소 (Linear elastic element), 비선형현수요소(Nonlinear catenary element), 비선형다항요소(Nonlinear polynomial element), 비선형 와이어요소(Nonlinear wire element)의 계류요소를 지원한다. 특히, 현수계류시스템의 경우 연결요소(Joint element)를 사용하여 두 가지 이상의 계류로프를 연결하여 사용 할 수 있다(ANSYS, 2010).
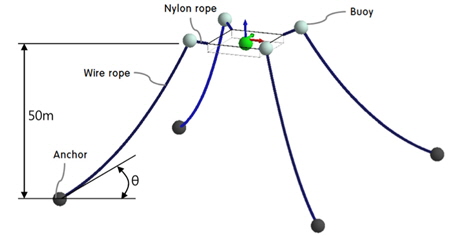
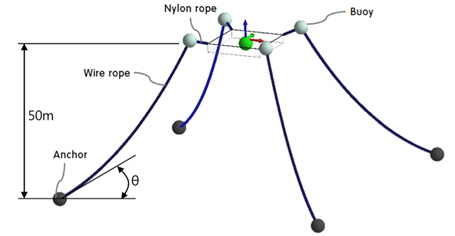
본 대상 모델에서는 4점 유연부이 계류시스템을 적용하였다. 유연부이 계류시스템은 앵커와 부이, 로프로 구성되며 앵커와 부이는 와이어로프로 프레임과 부이는 나일론로프(7m)로 연결되었다. 유연부이 계류시스템이 적용된 모델은 Fig. 4와 같다. 2개의 로프를 사용하여 모델링 되었으며 연결부이(Joint buoy)를 사용해 각각의 로프를 연결하였다. 앵커는 해저면(수심, 50m)에 고정된 것으로 하며 와이어로프의 길이는 계류각(
[Table 2] Details of mooring line
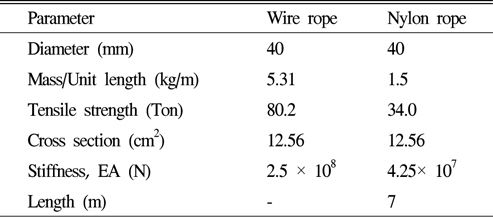
Details of mooring line
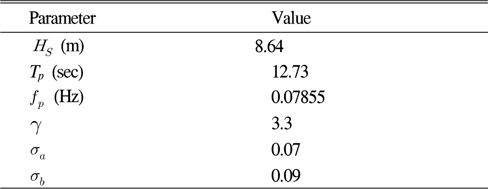
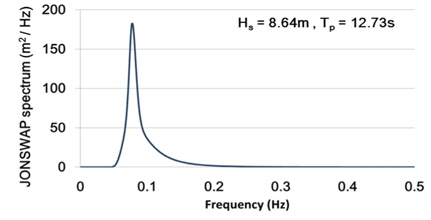
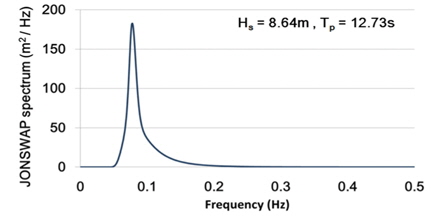
실제 해상은 파고, 파장이 다른 수많은 파가 중첩되어 불규칙한 상태임으로 각각의 파랑 에너지를 파랑 주파수에 대해 나타낸 파랑 스펙트럼에 의해 정의 된다. 본 해석에서는 폭풍이 발생한 해양 환경을 나타내는 JONSWAP 스펙트럼을 사용하였는데 이는 식 (6)과 같이 유효파고
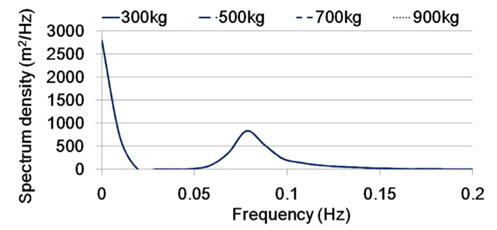
JONSWAP 스펙트럼의 파랑 제원은 남해안 50년 빈도 설계파 (KIOST, 2005)를 적용하였으며 Table 3과 같다. 표의 제원에 의한 JONSWAP 스펙트럼 형상은 Fig. 5와 같다. 또한 해조류 양식 시설이 파랑과 45°방향으로 설치된다는 것을 가정하여 파향을 Fig. 6과 같이 45°로 고정하였다.
[Table 3] Parameters of JONSWAP spectrum
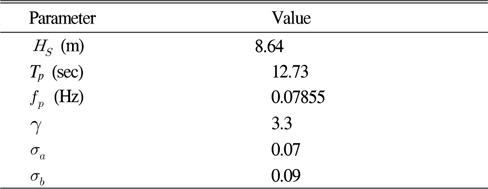
Parameters of JONSWAP spectrum

여기서, ,
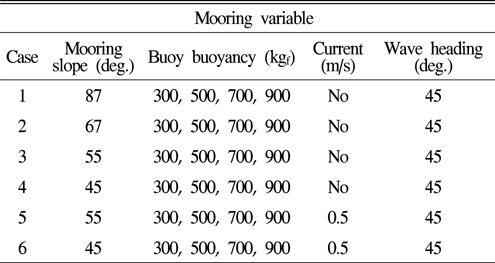
해조류 양식시설의 계류변수에 대한 영향을 분석하기 위해 시간 영역 수치 시뮬레이션을 수행하였다. 시간영역 수치 시뮬레이션은 Hydrodynamic diffraction 모듈에서 주파수영역해석을 수행한 후 Hydrodynamic time response 모듈에서 연동되어 수행된다. 시간영역해석은 불규칙파랑에 대한 유연부이계류시스템의 계류변수인 앵커와 부이의 경사각, 부이의 부력을 변화시켜 해석을 수행하였다. 하중조건과 유연부이 계류시스템의 계류변수에 대한 해석조건을 Table 4에 나타내었다. 여기서 파랑 제원은 Table 3과 같으며, 부이의 중량은 기존 제품을 기준으로 선정하였고, 계류각은 45°보다 크게 선정함으로써 해조류 양식시설이 군으로 설치될 때 시설간의 작업거리 확보가 용이하도록 하였다. 해조류 양식시설의 계류변수에 대한 영향을 분석하기 위해 시간 영역 수치 시뮬레이션을 수행하였다. 시간영역 수치 시뮬레이션은 Hydrodynamic diffraction 모듈에서 주파수영역해석을 수행한 후 Hydrodynamic time response 모듈에서 연동되어 수행된다. 시간영역해석은 불규칙파랑에 대한 유연부이계류시스템의 계류변수인 앵커와 부이의 경사각, 부이의 부력을 변화시켜 해석을 수행하였다. 하중조건과 유연부이 계류시스템의 계류변수에 대한 해석조건을 Table 4에 나타내었다. 여기서 파랑 제원은 Table 3과 같으며, 부이의 중량은 기존 제품을 기준으로 선정하였고, 계류각은 45°보다 크게 선정함으로써 해조류 양식시설이 군으로 설치될 때 시설간의 작업거리 확보가 용이하도록 하였다.
[Table 4] Time domain analysis configuration
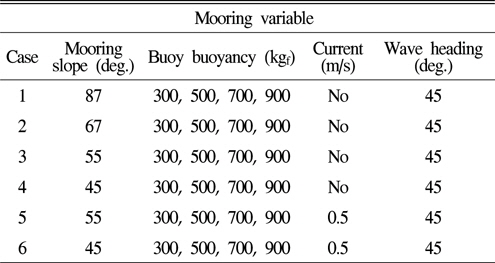
Time domain analysis configuration
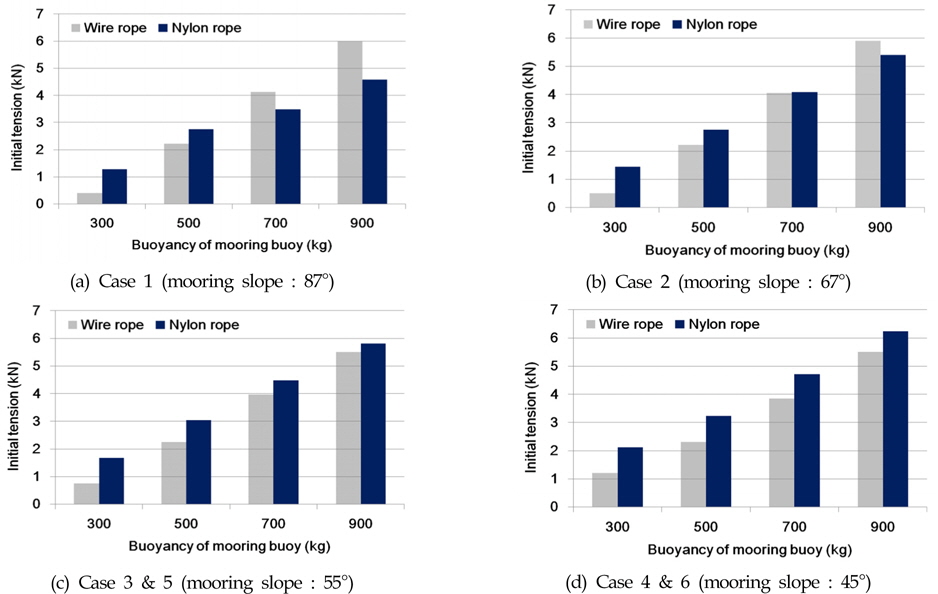
해석에서의 시간영역은 1000초이고 응답의 간격은 0.1초이다. 시간영역해석을 통해 구조물의 시계열 동요응답과 시계열 로프장력응답을 계산하였다. 동요는 질량중심의 거동을 의미하며 로프장력은 Fig. 6에 나타낸 3번 로프의 시계열 응답을 나타낸다. 로프의 초기장력은 계류변수인 부이의 부력 크기, 앵커와 부이의 경사각, 수중에서의 로프 중량에 대해 준정적으로 계산될 수 있다. 계류변수에 의한 케이스 별로 로프의 초기장력을 도시하였고 구조물의 동요와 로프 장력의 불규칙 시계열 응답을 수치해석을 통해 계산하였다. 또한 불규칙 시계열 데이터는 FFT를 통해 주파수영역의 스펙트럼으로 변환되어 비교되었다. 구조물의 시계열 동요응답은 병진운동모드인 전후동요, 상하동요의 두 개의 응답이 고려되었다. 여기서 좌우동요는 전후동요로부터 예측할 수 있다.
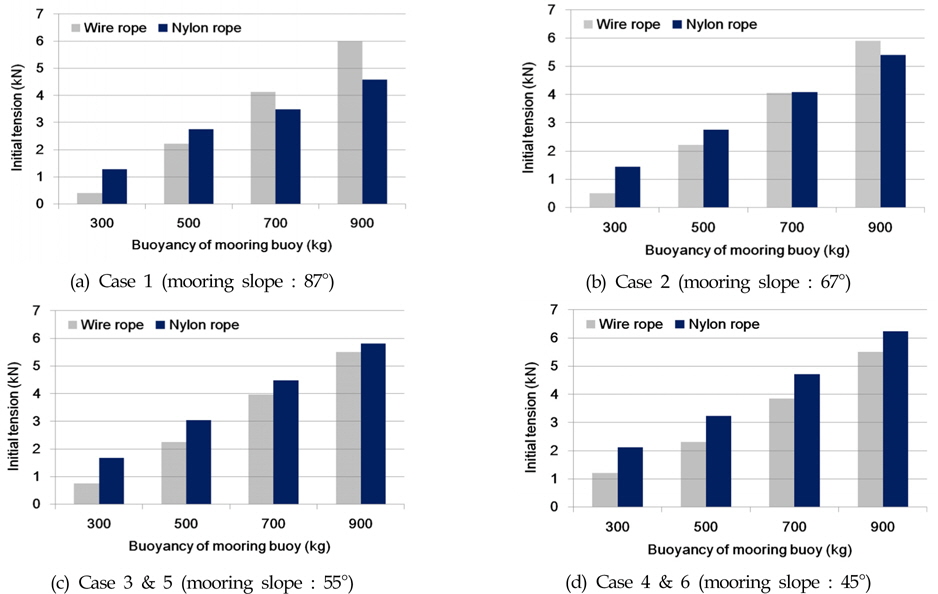
Fig. 7은 해석 케이스에 따른 로프의 초기 장력을 나타내고 있다. 부력의 크기가 증가할수록 로프의 초기장력은 선형적으로 증가함을 보이며 이는 Kim et al.(2002)의 정적실험을 통한 장력 계측 결과와 부합한다. 또한, 나일론로프장력의 증가 폭보다 와이어로프장력의 증가 폭이 더 크게 나타난다. 이는 부이 하부에 있는 와이어로프가 부이와 수평하게 위치되는 나일론로프에 비해 부이의 부력에 더 지배적임을 나타낸다. 반면 계류경사각의 변화에서는 계류 경사각이 완만해질수록 나일론로프의 초기장력이 와이어로프의 초기장력보다 더 크게 나타났으며 이는 계류경사각이 낮아질수록 계류로프의 수평장력 성분이 증가하는 것을 의미한다고 볼 수 있다.
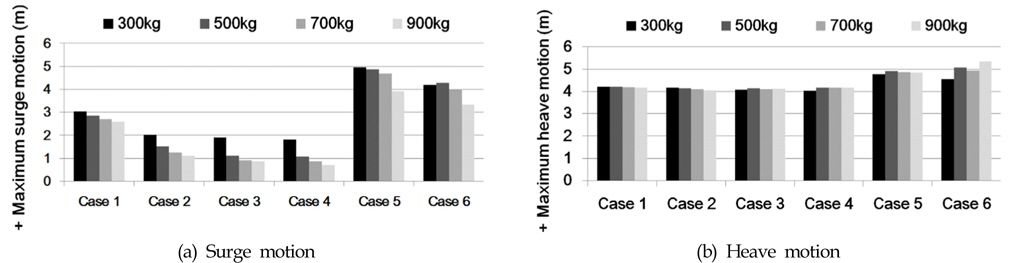
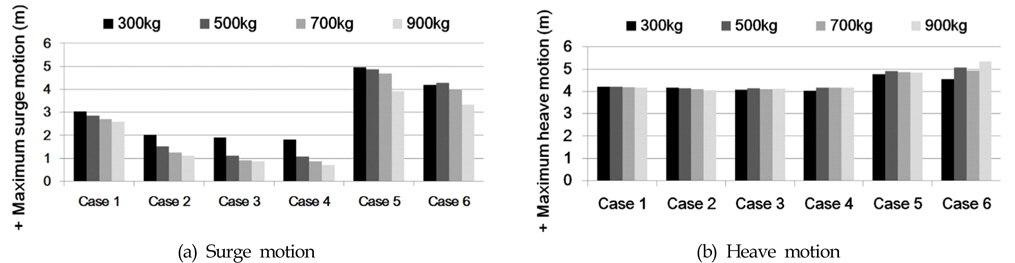
Fig. 8은 각각의 케이스의 시계열 동요응답에서 나타난 최대 동요 값을 나타낸다. 파랑하중만 작용하였을 시(Case 1~4) 부이의 부력이 증가하는 모든 경우에서 구조물의 최대 전후동요 값은 감소하였으며 계류 경사각이 작아지는 경우에서도전후동요 값은 감소하는 경향이 나타났다. 이는 각각 유연부이계류시스템의 계류변수인 부이의 부력과 계류경사각의 변화에 의한 로프 초기장력의 증가에 기인하는 것임을 알 수 있다.
또한 조류를 고려하였을 시(Case 5, 6)의 최대 전후동요 값은 그렇지 않은 경우에 비해 크게 나타나며 마찬가지로 부이의 부력이 증가함에 따라 동요는 감소하는 경향을 나타낸다.
상하동요의 경우 파랑하중만 작용하였을 시(Case 1~4) 계류변수인 부이의 부력과 계류경사각의 변화에 대해 최대동요 값이 유사하게 나타났으며 조류 고려 시(Case 5, 6) 조류에 의한 전후동요의 큰 증가로 인해 상하 동요 또한 증가하는 것을 볼 수 있다.
케이스 해석에서 계산된 시계열 운동응답을 FFT 코드를 통해 변환시켜 얻은 스펙트럼을 Fig. 9와 10에 도시하였다. 불규칙한 시계열 응답을 스펙트럼을 통해 정성적으로 비교하였으며 피크 값과 그에 상응하는 피크 주파수를 확인하였다.
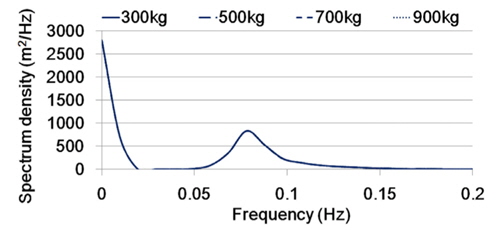
Fig. 9는 해조류 양식시설의 상하동요 스펙트럼을 나타낸다. 양식시설의 상하동요 스펙트럼은 파랑의 저주파수 영역 하중성분에 지배적임을 볼 수 있으며 피크 주파수는 0.0781Hz로 파랑하중의 피크 주파수 0.0785Hz와 유사하게 나타났다. 또한, 상하동요 스펙트럼의 경우 계류시스템의 계류변수인 부력의 크기와 계류경사각에 따른 모든 해석 케이스에서 유사한 응답이 나타난다. 이는 상하동요의 경우 본 계류시스템의 영향을 받지 않고 독립적임을 의미한다. 이는 KIOST(2003)의 유연부이 계류시스템 성능평가 연구에서의 수치실험 결과와 부합된다.
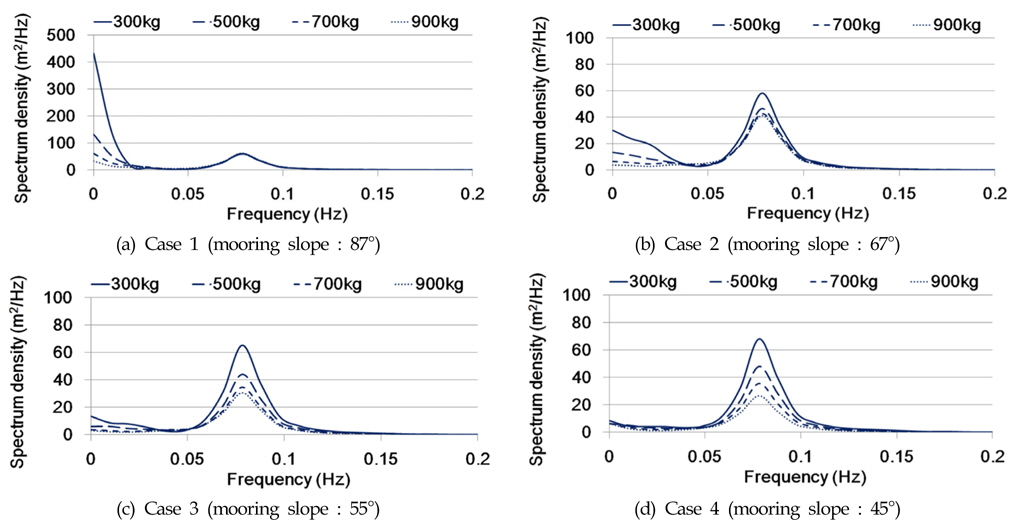
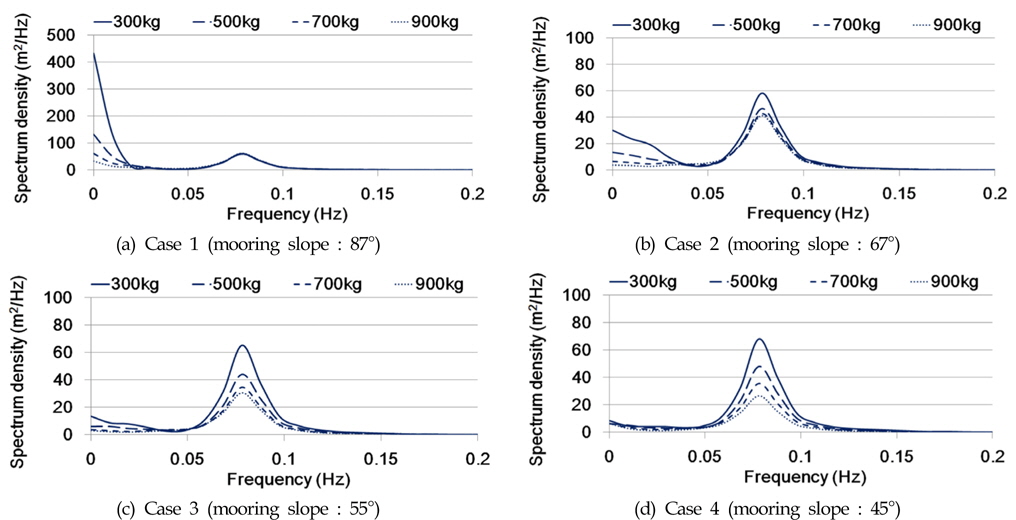
Fig. 10은 파랑하중만 작용하였을 시(Case 1~4)의 전후동요 스펙트럼을 나타낸다. 상하동요와 마찬가지로 피크 주파수는 0.781Hz로 파랑스펙트럼의 피크 주파수와 유사하게 나타난다.
Case 1(Mooring slope: 87°) 부이 300kg의 경우 저주파수영역에서의 응답이 매우 크게 발생하며 부이의 부력의 크기가 증가함에 따라 저주파수영역에서의 응답 크기가 급격히 감소하는 것을 볼 수 있다. 또한, 모든 경우에서 부이의 부력 증가와 계류경사각이 낮아짐에 따라 응답의 크기가 감소한다.
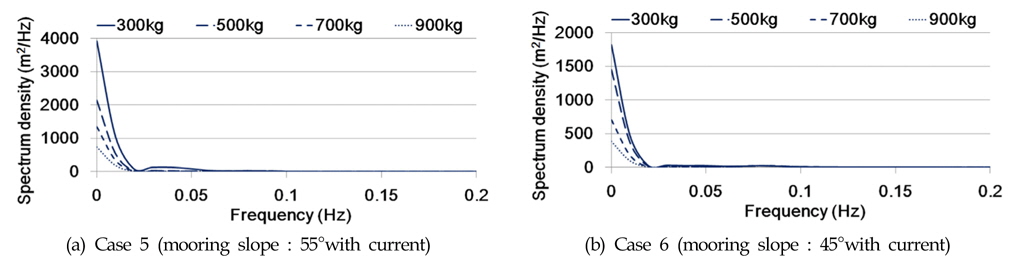
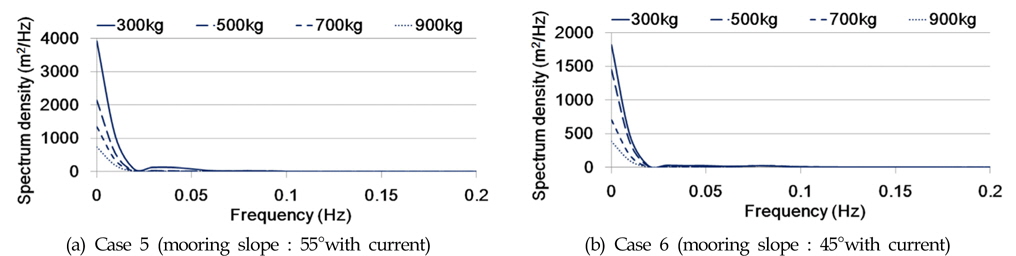
Fig. 11은 추가적인 조류하중 고려 시(Case 5, 6) 전후동요 스펙트럼을 나타내고 있다. 같은 계류조건인 Fig. 10의 (c), (d)와의 비교 시 저주파수영역에서의 응답이 매우 크게 나타나는 것을 확인 할 수 있다. 이는 시설의 전후동요에 있어서 조류로 인한 영향이 파랑하중의 장주기성분과 유사한 특성을 가지고 파랑하중에 비해 더 지배적 인자임을 나타낸다. 마찬가지로 부력의 증가와 계류 경사각이 작아짐에 따라 응답의 크기가 감소하는 특성이 나타난다.
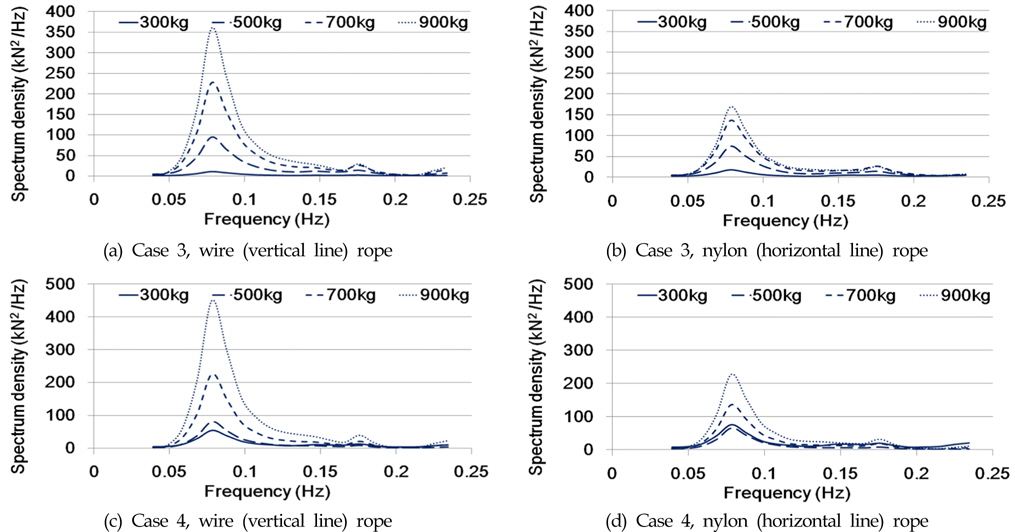
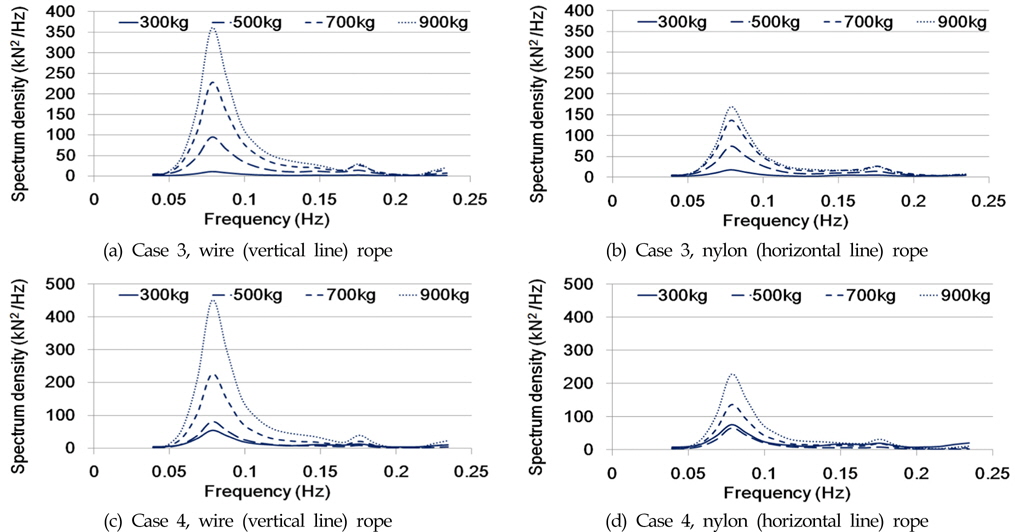
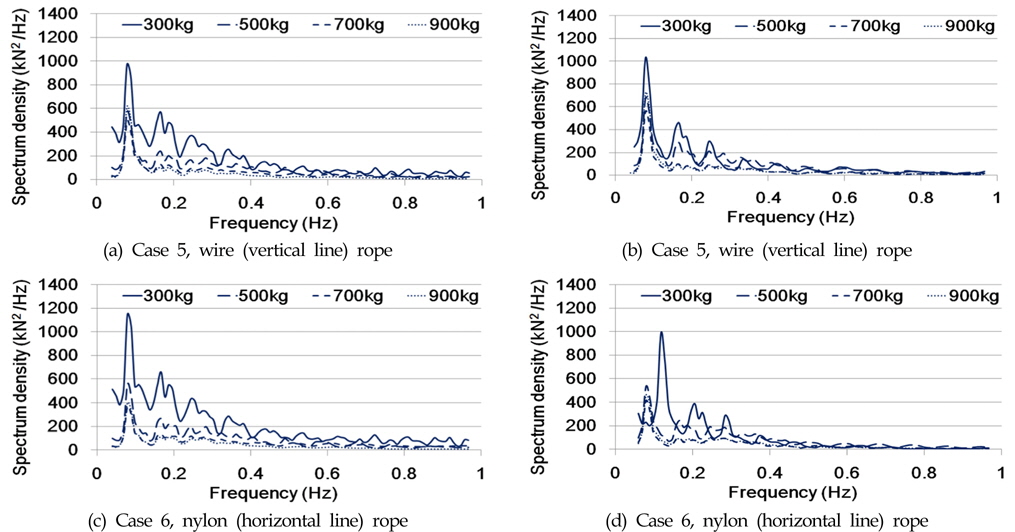
계류로프의 시계열 장력응답을 FFT를 통해 스펙트럼으로 변환하여 Fig. 12에 도시하였다. 로프장력 스펙트럼의 피크 주파수는 운동응답 스펙트럼과 마찬가지로 파랑하중의 피크 주파수와 일치한다. 로프장력 스펙트럼 응답의 크기는 동요 스펙트럼과는 반대로 부이의 부력이 증가와 계류경사각이 낮아질수록 증가하는 것을 확인 할 수 있다. 이는 유연부이 계류시스템의 계류변수에 의한 계류로프의 장력의 증가가 해조류 양식시설의 동요의 감소에 영향을 미치고 있음을 의미한다.
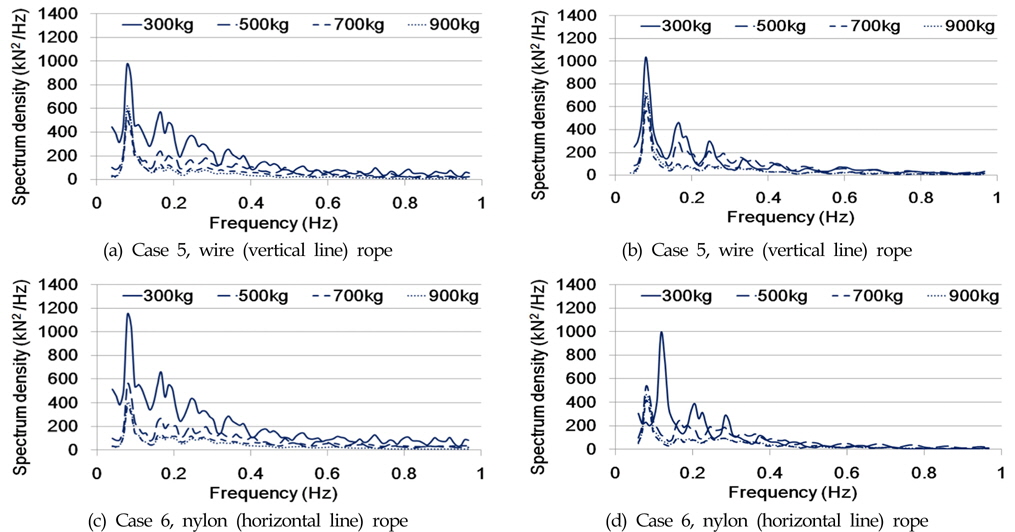
또한, 수직계류로프와 수평계류로프의 장력응답 비교 시 수직 계류로프인 와이어로프의 장력 응답이 더 큰 것을 볼 수 있다. Fig. 13은 추가적으로 조류가 작용했을 때의 로프장력 스펙트럼을 나타낸다. Fig. 12의 파랑하중만이 적용되었을 경우와는 달리 다수의 피크가 발생하였으며 저주파수영역에서의 응답이 상대적으로 큰 것을 볼 수 있다. 이는 파랑하중의 장주기 성분과 유사한 특성을 가지는 조류에 의해 추가적으로 발생하는 동요의 제어 때문이라 판단되며 부력의 증가에 의해 응답의 크기가 감소하는 경향이 나타난다.
외해 해조류양식시설의 동적응답특성을 검토하기 위해 수치 연구를 수행하였다. 계류변수에 따른 해조류 양식시설의 동적 특성을 비교하기 위해 계류변수에 따른 케이스 해석이 수행되었으며 환경하중은 파랑스펙트럼과 조류를 적용시켜 시계열 응답을 해석하였다. 양식시설의 상하동요, 전후동요 두 가지의 시 계열 응답과 계류로프의 시계열 장력응답을 스펙트럼으로 변환하여 비교하였고 다음과 같은 결론을 도출하였다.
(1) 유연부이 계류시스템의 계류변수인 부이의 부력과 계류경사각에 의해 계류로프의 초기장력을 결정할 수 있었다. 초기장력이 증가함에 따라 양식시설의 전후동요가 감소하는 경향이 나타났으며 상하동요의 경우 모든 경우에서 유사한 응답이 나타났다.
(2) 파랑스펙트럼에 대한 해조류 양식시설의 시계열 동요를 계산하여 스펙트럼으로 변환하여 비교하였다. 동요 스펙트럼 분석 결과, 양식시설의 동요는 장주기성 하중에 지배적이었으며 전후동요의 경우 유연부이 계류시스템의 계류변수인 부이의 부력과 계류경사각에 의해 동요의 제어가 가능하였다. 반면 상하동요의 경우 모든 계류변수에서 유사한 응답이 나타났으며 이는 전후동요모드와는 달리 상하동요모드는 유연부이 계류시스템에 영향을 받지 않고 독립적임을 의미한다.
(3) 계류로프의 시계열 장력응답과 로프장력 스펙트럼을 통해 계류변수와 하중조건에 의한 계류로프의 동적특성을 식별하였다. 로프의 장력 스펙트럼 또한 저주파수영역에서의 응답에 지배적이다. 이는 하중의 저주파수 성분에 의해 발생하는 동요의 제어에 기인하며 초기장력이 증가할수록 응답은 크게 나타난다. 조류의 고려 시 그렇지 않은 경우에 비하여 상대적으로 동요가 크게 발생하며 로프 스펙트럼 응답의 크기 역시 마찬가지로 증가한다. 또한, 많은 수의 피크가 발생하며 계류변수에 의한 동요의 감소에 피크 발생 수와 그 응답의 크기가 줄어드는 특성이 나타났다.