A suction anchor is one of the most popular anchors for deepsea floating systems. An anchor used for catenary mooring is predominantly under a horizontal load. In this study, the behavior of a suction anchor installed in cohesionless soil was investigated when the anchor was mainly subjected to a horizontal load induced by a catenary line. In order to study the behavior of the suction anchor, 3D FEM analysis models were developed and analyzed. Depending on the location of the load (padeye), the ultimate horizontal load was monitored. The distributions of the reaction forces around the anchor induced by the seabed were analyzed using the circumferential stress to understand the behavior of the suction anchor under a horizontal load.
석션 앵커는 상부가 밀폐된 원통 말뚝형 앵커로 자중에 의한 관입 이후에, 앵커 내·외부의 압력차를 이용하여 지중에 관입하는 원리를 이용하여 설치되는 앵커이다. 이로 인해 크기 및 설치 수심에 제약을 받지 않으므로 대규모의 해상 구조물 및 심해 석유시추선 등에 널리 이용되고 있다. 현수선(Catenary)형식의 계류선을 위해 석션 앵커가 사용되는 경우, 수평 하중이 지배적으로 작용하게 되므로 석션 앵커의 수평 지지력을 산정하는 일은 매우 중요하다. 점성토 지반의 경우, 수평 하중을 산정하기 위한 방법이 몇몇 선행 연구를 통해 제시되었다(Anderson and Jostad, 1999; Randolph and House, 2002; Aubeny and Murff, 2003; Anderson and Jostad, 2004; Kim et al., 2011). 사질토 지반에 관입된 석션 앵커의 수평 지지력 산정은 이론적 방법 및 실험적 방법으로 Cho and Bang (2002) 및 Bang et al.(2011)에 의해 연구된 바 있지만, 다소 복잡한 알고리즘을 제시하고 있어 설계를 위한 간편한 절차가 필요한 실정이다. 또한, 천해역에 세립 사질토가 많이 분포하고 있어 이 지역에 설치된 석션 앵커의 거동에 관한 연구 사례가 부족하다. 판 앵커(Plate anchor)의 경우 국내에서도 사질토를 대상으로 하여 인발 저항력에 관한 연구가 수행된 바 있다(Seo et al., 2008).
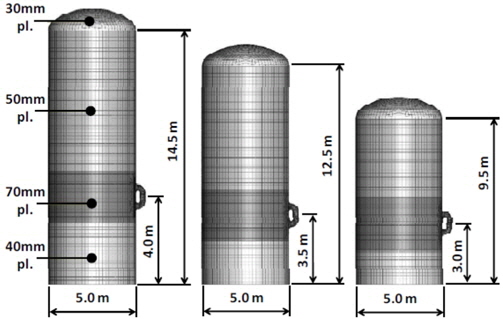
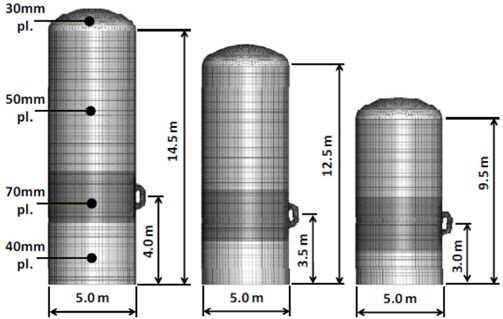
전통적으로 육상 토목 구조물에 사용된 단말뚝의 수평 지지력을 산정하기 위하여 말뚝 주변에 형성된 토압 분포 예측을 통해 지지력이 계산된다(Brinch Hansen, 1961; Broms, 1964; Meyerhof et al., 1981; Prasad and Chari, 1999). 석션 앵커의 형상이 단말뚝과 유사하기 때문에, 동일한 방법으로 석션 앵커의 수평 파지력을 계산할 수 있지만, 이는 앵커의 형상과 지중 하중 재하위치(Pad-eye)가 달라지는 앵커의 특성을 반영할 수 없다. 최적의 석션앵커 파지력을 확보하기 위하여 앵커 벽면에 Pad-eye가 위치하는 형태의 앵커는 여러 현장에서 시공된 바 있으며(Aas et. al., 2009; Langford et. al., 2012), 노르웨이의 Skarv field에 시공된 앵커의 형상과 Pad-eye의 위치는 Fig. 1과 같다.
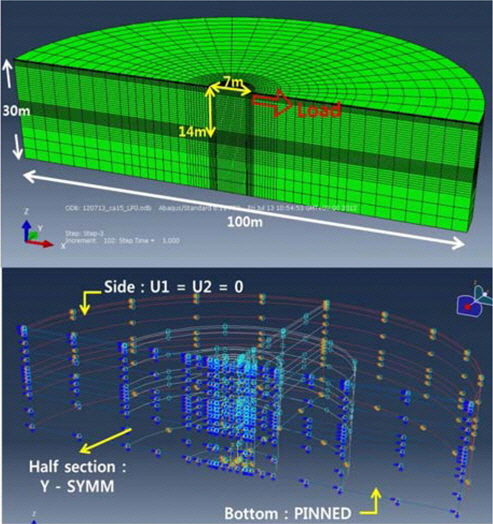
따라서 본 연구에서는 최대의 지지력이 발현될 수 있도록 하중 재하위치(Pad-eye)를 고려하여 연구 하였으며, 사질토 지반에 관입된 석션 앵커가 수평 하중을 받는 경우의 극한 지지력 산정을 목표로 하였다. 앵커의 경우, 하중의 재하 위치는 효율적인 지지력 확보를 위하여 두부가 아닌 앵커 벽체에 존재 하며, 하중의 재하 위치에 따라 앵커의 거동 및 지지력이 달라지므로 각 하중 재하 위치에 따른 수평 지지력을 산정·분석하였다. 이를 위하여 3D 유한요소법 해석을 수행하였으며, 상용 프로그램인 ABAQUS 6.11(ABAQUS, 2011)을 이용하였다.
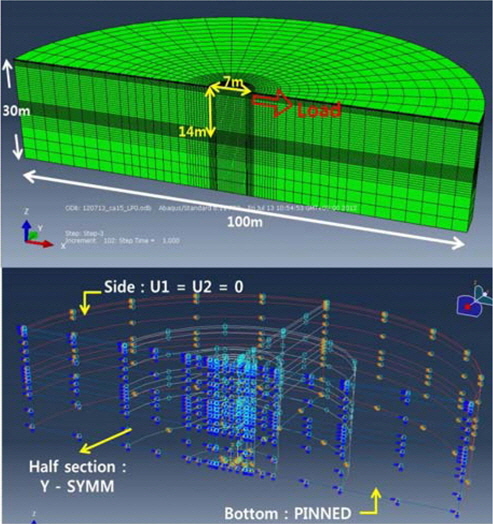
본 연구에서는 직경 7m, 길이 14m로 길이와 직경의 비(
앵커와 지반모델은 공통적으로 8절점을 갖는 3차원 연속체 요소로서, 응력 변형률의 계산을 위해 저감적분(Reduced integration)을 채택하였다. 해석에 사용된 앵커와 지반 모델은 총 5만여개의 요소로 구성되었으며, 2만여개의 요소로 구성된 모델부터 요소의 개수를 점차 증가시켜 10만개 이상의 요소를 갖는 모델에 대하여 해석을 수행한 결과, 거동에 큰 차이를 보이지 않았으므로 해석 시간을 고려하여 약 5만여개로 결정하였다. 다만 앵커와 지반이 인접한 부분에서는 수렴성을 고려하여 조밀하게 요소망을 분포시켰다(Fig. 2).
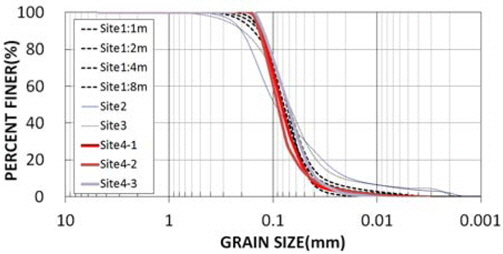
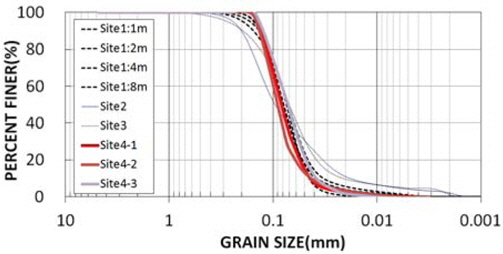
본 연구에서는 서해안 해저면(Seabed)에 분포한 세립 사질토를 대상으로 하여 석션 앵커의 지지력을 산정하였다. Fig. 3과 같이 전북 고창군 및 전남 영광군 주변 시료를 4 군데에서 직접 채취 하였다(Choo, et al., 2012).
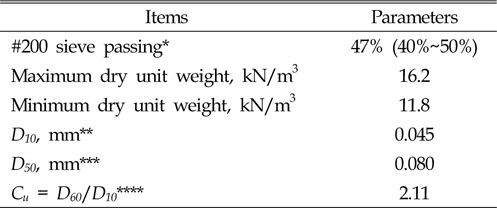
각 시료에 대하여 체분석, 비중계 분석 및 레이저 분석을 수행하여 Fig. 4의 입도 분포곡선을 얻었다. 모든 시료가 통일분류법(USCS, unified soil classification system) 분류 체계에 의해 SM(silty sand, 세립질 모래)으로 분류되었으며 획득한 시료에 대한 기본 물성 자료는 Table 1에 나타내었다.
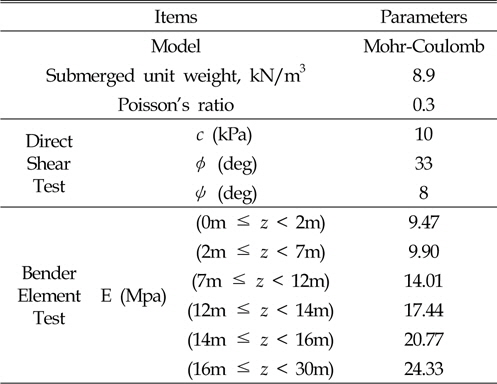
[Table 1] Basic property of seabed soils
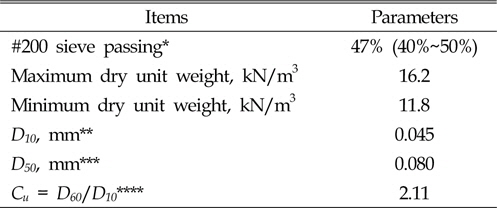
Basic property of seabed soils
본 수치해석에서 사질토 지반의 구성 모델로 Mohr-Coulomb 모델을 사용하였으며 유한요소 해석 프로그램에 적용하여 수치적인 예측을 하는 경우 모래의 응력-변형률 거동을 나타내기 위해 이용된 대부분의 모델들이 항복면과 소성포텐셜의 형태를 따로 정의하므로(Desai and Siriwardane, 1984), 항복면과 관련한 내부마찰각(
[Table 2] Input parameters for seabed model
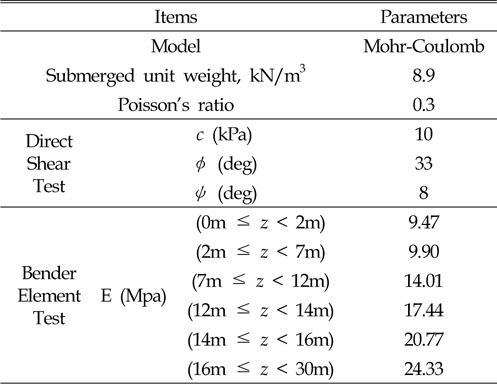
Input parameters for seabed model
사질토는 구속압의 영향을 크게 받으므로 깊이에 따른 탄성계수(
수치 해석은 다음의 단계에 따라 수행하였다.
1) 지반 모델에 대하여, 깊이에 따른 초기 응력을 재현하기 위하여, Geostatic 조건을 적용하여 평형상태가 되도록 하였다.
2) 석션 앵커의 설치를 위하여, 앵커가 놓일 위치의 지반 모델을 제거하였다. 이때, 지반과 앵커의 경계면에는 롤러를 이용하여 변위를 억제하였다. 앵커의 벽면과 맞닿게 되는 지반 요소는
3) 석션 앵커 모델을 활성화 시켜, 앵커를 지반에 설치하였다. 이때, 앵커 내․외측과 지반 사이의 경계면에서는 Surface-tosurface contact를 적용하여 Gapping과 Slippage가 발생하도록 모사하였다. 접촉면은 Coulomb의 파괴 이론에 따르며, 마찰계수(μ)는 지반의 내부 마찰각의 약 2/3에 해당하는 0.41을 적용하였다.
4) 수평방향의 하중을 재하 하였다. 이때, 하중에 의한 제어가 아닌 일정량의 변위를 발생하도록 제어하여 앵커의 수평 지지력을 산정하였다.
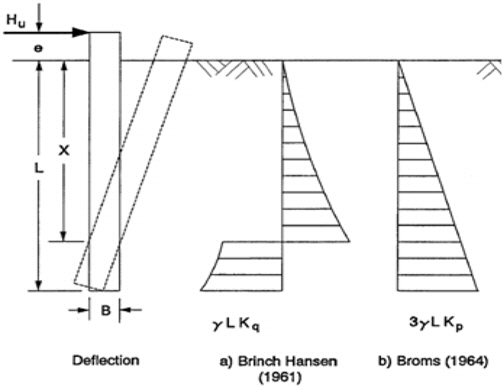
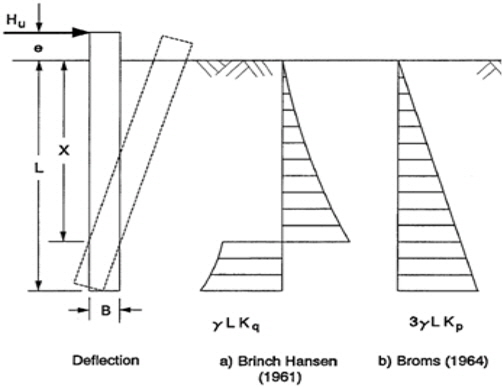
석션 앵커의 극한 지지력은 기존 말뚝의 극한 수평저항력 산정방법으로부터 비교를 통하여 결정하였다. 널리 이용되는 것으로써 Brinch Hansen(1961)의 방법과 Broms(1964)의 방법이 있다. 두부 자유 말뚝에 수평력이 작용할 때 지반의 깊이별 반력 분포는 Fig. 5와 같이 나타낼 수 있다. 길이가
Brinch Hansen은 회전 중심점을 기준으로 하여 반대 방향의 반력이 발생하므로, 이를 수평 방향에 대한 힘의 평형과 말뚝 두부를 기준으로 한 모멘트 평형식을 취함으로써 회전 중심 위치를 구한다. 말뚝의 깊이
Broms는 문제를 단순화하기 위하여 지반 조건을 순수한 모래지반이거나 순수한 점성토 지반으로 가정하고, 짧은 강말뚝과 긴변형말뚝을 각각 별도로 고려하였다. 짧은 말뚝의 경우 말뚝 뒤쪽의 주동토압을 무시하고 앞쪽의 수동토압에 대하여 극한 지지력을 산정하였으며 수동토압계수
본 연구에서는 해석하고자 하는 앵커의
앵커 직경의 5% 와 10% (35cm, 70cm)에 해당하는 변위가 하중 재하위치점에 발생할 때의 수평 저항력을 Brinch Hansen 방법 및 Broms 방법에 의해 계산한 결과를 Fig. 6에 나타내었다.
횡방향 하중을 받는 말뚝의 경우 항복점이 분명하게 나타나지 않는 특성이 있어 변위를 기준으로 하는 경우가 많으므로 본 연구에서도 변위를 기준으로 하여 극한 지지력을 정의하였다. Brinch Hansen 방법의 경우, 지지력 계산을 위한
하중의 작용점에 따른 수평 지지력 변화를 평가하기 위하여 각 하중 위치별로 해석을 수행하였다.
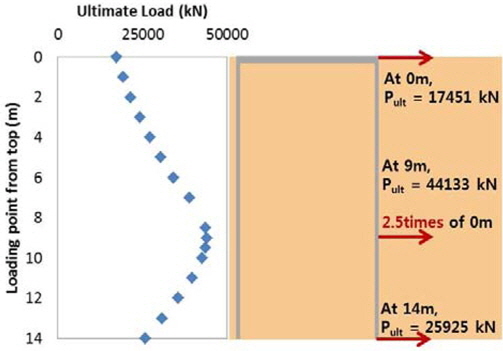
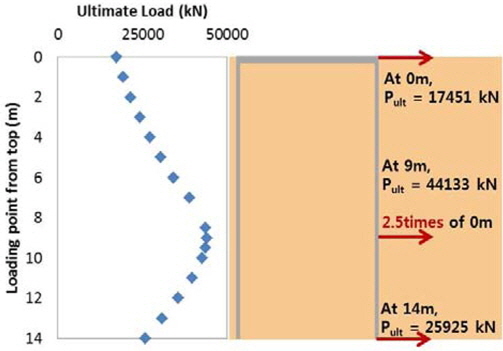
Fig. 7은 앵커 벽체를 따라 하중 작용점이 변화할 때의 극한 수평 지지력을 나타낸다. 하중이 앵커의 두부에 작용하는 경우 17451kN의 지지력이 발생하였으며 이는 Fig. 6에서 나타낸 바와 같이 기존의 이론식과 비교하여 큰 차이를 보이지 않는다.
하중 재하 위치가 아래로 내려감에 따라 지지력이 점점 증가하였다. 앵커 길이의 약 2/3위치에 해당하는 9m 깊이에서 하중이 작용했을 때, 4만 kN 이상의 지지력이 발생하여 최대값을 나타냈으며, 이는 하중이 두부에 작용한 경우와 비교하여 약2.5배 차이를 보였다.
하중이 9m 이상의 깊이에서 재하 될 때, 극한 지지력은 하중 위치가 깊어짐에 따라 감소하였다. 앵커 선단에 하중이 작용한 경우의 수평 지지력은 25925kN으로 최대값인 44133kN의 약60%에 해당한다.
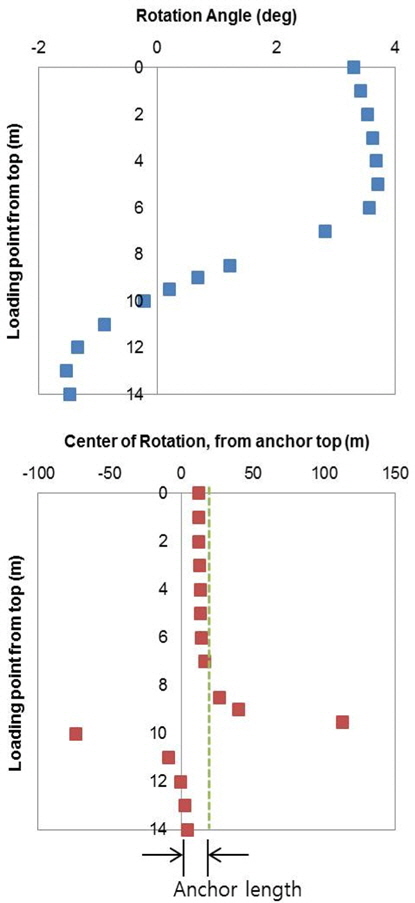
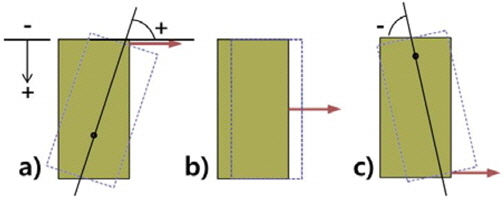
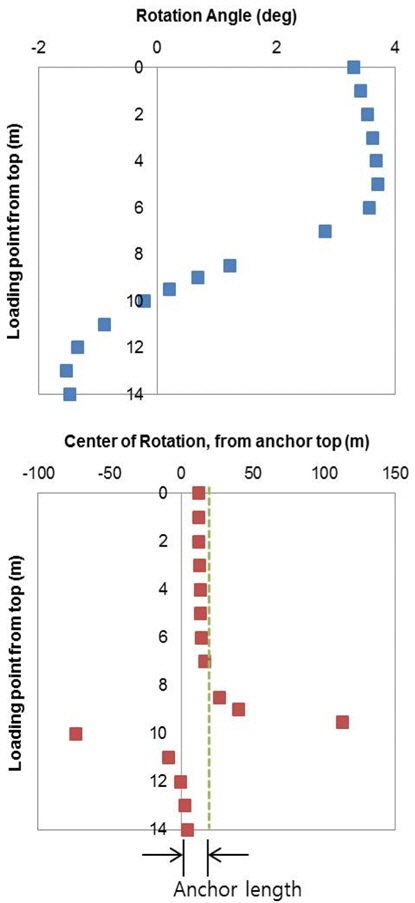
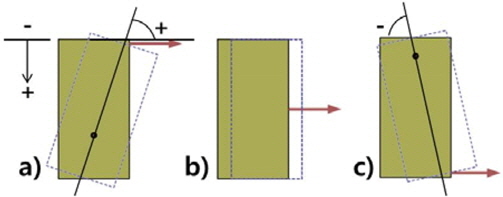
본 연구에서는 Fig. 7에 나타낸 바와 같이 다양한 재하위치에 따라 앵커의 지지력 및 거동을 평가하였고, 각 하중위치에서의 앵커의 회전각 및 회전 중심을 분석한 결과는 Fig. 8과 같다. Fig. 8의 분석을 토대로 앵커의 거동을 개념도로 나타내면 Fig. 9와 같다. 시계방향의 회전각을 (+)로 하였으며, (−)값은 반시계방향의 회전각을 나타낸다. 극한 지지력이 앵커에 작용할 때, 앵커의 초기 위치와 변형 후의 위치를 비교하여 앵커의 회전각과 회전 중심의 위치를 산정하였으며 이때 앵커는 Rigid한 거동을 보이는 것으로 가정하였다.
하중이 앵커의 두부로부터 1/2이하의 얕은 깊이에 작용할 때 앵커는 약 3°내외의 각으로 회전한다. (+)의 값을 가지므로, Fig. 9의 a)에 나타낸 바와 같이 시계방향으로 회전함을 나타낸다. 이때, 회전 중심 또한 앵커 상단으로부터 약 12m에 위치하고 있어 앵커 내부에 존재하며 하중 위치가 변함에 따라 회전 중심의 위치는 크게 변화하지 않는다.
그러나 하중의 재하 위치가 9m에 근접함에 따라 회전각은 급격히 감소하였으며, 회전 중심의 위치는 크게 증가하였다. 회전각이 0°에 가깝고, 회전중심의 위치가 앵커로부터 무한히 떨어져 있는 것은 앵커가 회전 운동 없이 순수하게 평행이동(Translation)하는 것을 의미한다. 이는 Fig. 9의 b)와 같은 거동이다. 앞서 Fig. 7의 결과에서 하중이 9m에 재하 될 때 최대 지지력이 발현되었다. 즉, 앵커가 회전하지 않고 수평으로 이동하는 경우 최대 지지력이 발현됨을 알 수 있다.
9m 이상의 깊은 곳에 하중이 작용하는 경우, 회전각은 (−) 값을 갖으며 반시계방향으로 회전하며 앵커로부터 멀리 떨어져 있던 회전 중심은 다시 앵커 내부에 위치한다. 이때 앵커의 거동은 Fig. 9의 c)와 같다.
수평 방향의 하중을 받는 앵커의 지지력을 해석하기 위해서는 지반 반력을 적절히 산정해야 한다. 임의의 깊이에서의 지반 반력은 앵커로부터 수평방향으로 무한영역까지 형성되는 응력 분포의 총 합으로 나타나는 단위 길이 당 힘이다.
즉 지반 반력을 산정하기 위해서는 앵커 주변에 작용하는 응력을 모두 합산하여 앵커와 지반의 접촉면에 작용하는 접촉 응력을 파악해야 한다.
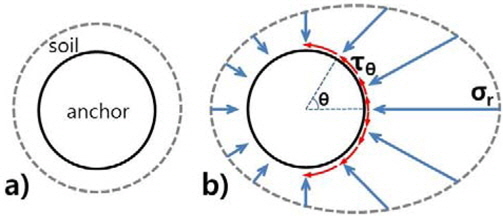
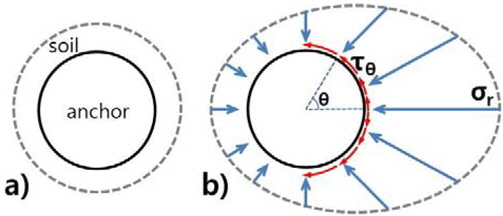
임의의 깊이에서 앵커와 지반 사이에 작용하는 응력은 Fig. 10과 같이 나타낼 수 있다. 하중을 받지 않는 앵커는 Fig. 10 의 a)와 같이 균등한 크기의 수평 응력을 받는다. 수평 방향의 하중을 받아 앵커가 움직이면 이동하는 방향(Front side)에 위치한 지반요소는 수동 상태가 되어 연직 응력(
깊이에 따라 앵커에 작용하는 연직 응력 및 전단 응력의 값이 달라지므로, 각 깊이에서 작용하는 응력을 산정하여 적분함으로써 수평 하중에 대한 깊이 별 지반 반력을 구할 수 있다.
지반 반력은 연직 응력에 의한 연직력(CNF, contact normal force)과 전단 응력에 의한 전단력(CSF, contact shear force)의 합으로 계산할 수 있다.
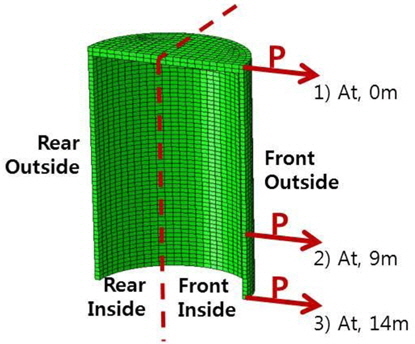
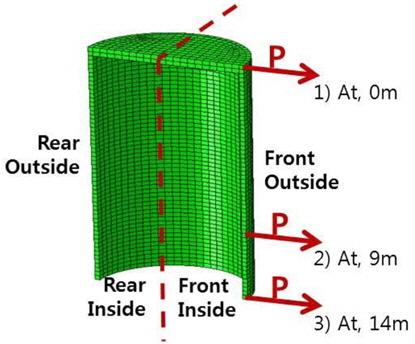
석션 앵커의 경우 지반과의 접촉면이 외측(Outside) 뿐 아니라 내측(Inside)에도 존재하고, 하중을 받는 전면(Front side)과 반대편 후면(Rear side)에서의 거동이 차이를 보이므로 네 부분으로 나누어 지반 반력을 도시하였다(Fig. 11).
서로 다른 하중 재하 위치에 대하여 극한 수평 지지력이 가해졌을 때, 앵커의 각 절점에서의 연직 응력 및 전단 응력 값을 얻었다. 이때 하중의 재하 방향이
전체 깊이에 대한 지반 반력을 합산하면 앵커의 수평 저항력을 산정할 수 있으며 해석 결과 얻어진 지반 반력의 합은 하중 작용점에서의 반발력과 일치하였다.
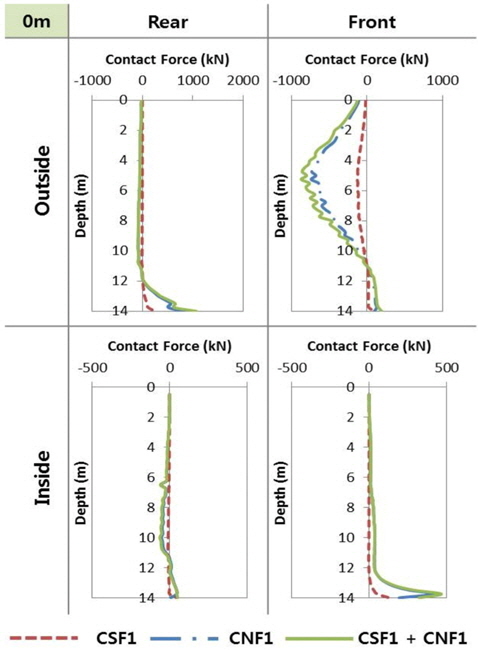
거동에 있어 차이를 보이는 대표적 사례로 하중이 지표 가까이에 가해지는 경우(0m), 최대 수평 지지력이 나타나는 경우(9m) 및 하중이 앵커 선단에 작용하는 경우(14m)에 대하여 각각 지반 반력을 산정하여 비교하였다. 계류선에 의한 외력이 앵커에 작용함으로써 형성된 지반의 저항력은 앵커를 향하여 나타난다. 본 논문에서는 지반의 저항력의 방향을 외력하중의 재하 방향에 따라 나타내었으며, (−)방향의 반력은 하중의 재하 방향과 반대되는 것이며, (+)방향의 반력은 하중의 작용 방향과 일치하는 것으로 하중과 동일한 방향의 저항력이 된다. 결과적으로 (+)방향은 전체 수평 저항력의 합력을 감소시키는 역할을 하게 된다.
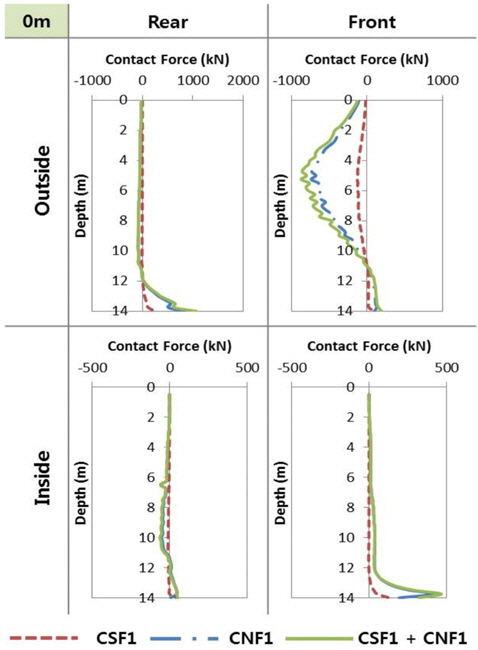
3.4.1 하중 재하 위치 0m (
하중이 앵커의 두부에 재하 되는 경우, 약 5m 부근까지는 (−)방향의 지반 반력이 증가하지만 이후 감소하는 경향이 나타나며 12m 근처에서 (+)방향의 반력이 형성되는데 이는 앵커의 회전과 관계된다. Fig. 8에 나타난 것과 같이 앵커 두부에 하중이 작용할 때 앵커의 회전 중심은 약 12m 근처에 위치한다. 즉, 앵커의 회전 중심을 기준으로 하여 얕은 깊이에서는 앵커와 접한 지반이 수동 토압을 받지만 깊은 깊이에서는 앵커의 회전으로 인해 주동 상태에 놓이게 된다. 이와 같은 현상은 후면 외벽(Rear outside)에서도 발생하며 회전중심보다 깊은 깊이에서 수동 토압이 형성되어 (+)방향의 지반반력이 나타난다. 이는 Binch-Hansen 방법에서 제시한 하중이 두부에 재하 된 말뚝 주변의 응력 분포와 유사하다. 앵커 내측에서의 반력은 외측에 비하여 크지 않은 값을 보이나, 회전 중심 아래의 전면 내벽(Front inside)에서는 후면 외벽과 동일하게 수동토압에 의한 (+)방향의 지반반력이 나타난다.
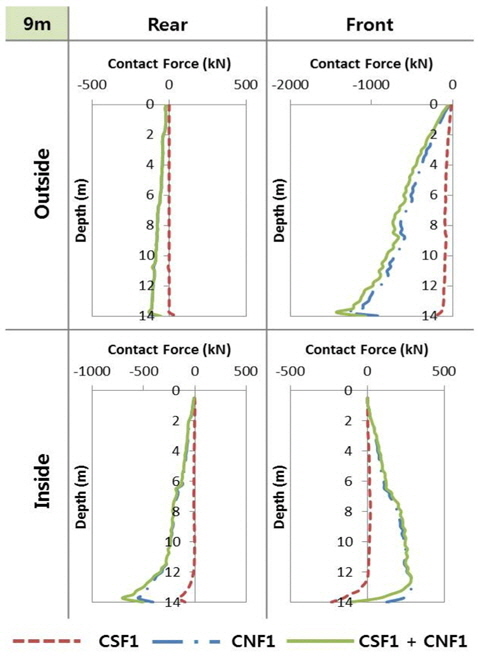
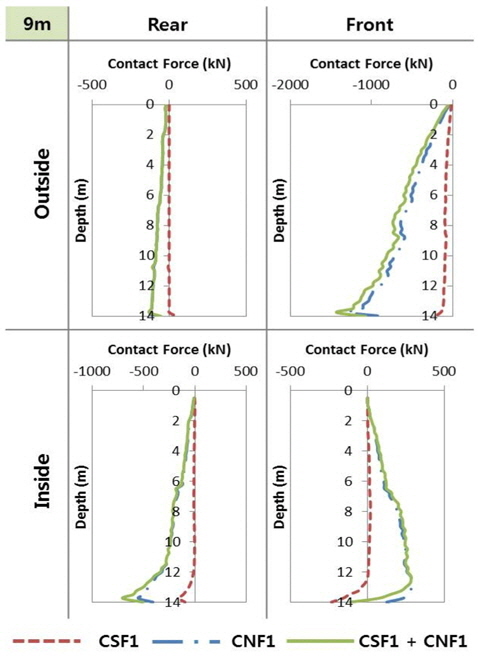
3.4.2 하중 재하 위치 9m (
최대 수평 지지력이 발생하는 경우 전면 외벽(Front outside) 에서의 토압은 앵커 전체 길이에 대하여 깊이에 따라 증가하는 경향을 보인다. 이는 하중이 두부에 재하 된 경우(3.4.1)에 회전 중심을 기준으로 하여 얕은 깊이와 깊은 깊이에서의 반력이 서로 다른 방향으로 형성된 것과는 다른 분포이다. 회전 중심의 위치가 앵커로부터 멀리 떨어져 있어 회전이 거의 발생하지 않고 하중 방향으로 수평 이동하므로 앵커의 전면부의 모든 면에 수동 토 압이 형성된다. 또한 후면 외벽에서는 주동 토압이 형성되어 결과 적으로 양측 모두에서 (−)방향의 반력을 가지므로 최대의 지지력이 나타난다. 한편 전면 내벽에서는 앵커 내부의 지반이 앵커와 함 께 이동하여 (+)방향의 반력을 나타내며 후면 내벽(Rear inside) 에서는 하중 방향으로 움직이는 앵커에 의해 내부의 지반과 벽 체 사이에 전단 파괴면이 형성되어 (−)방향의 저항력을 갖는다.
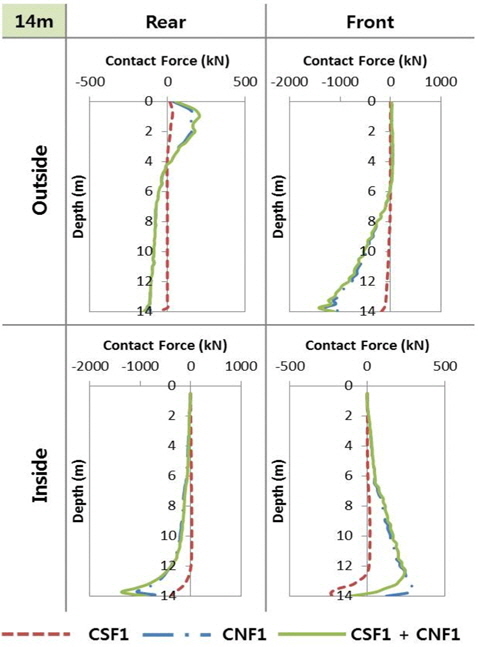
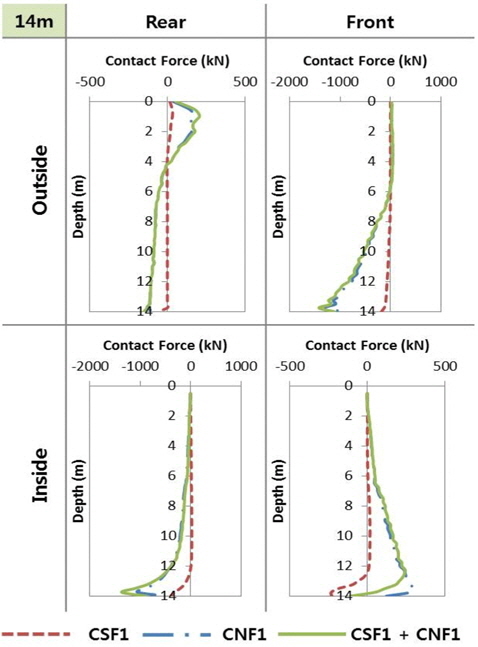
3.4.3 하중 재하 위치 14m (
앵커 선단에 수평 하중이 작용하는 경우 앵커는 반시계 방향의 회전을 보인다(Fig. 9). 이때, 하중이 작용하는 전면 외벽의 지표 가까운 곳에서는 앵커와 지반사이에 Gap이 형성되어 분리된다. 그 결과 전면 외벽에서의 Contact force는 0에 가까운 값이 나타나며 본 연구에서는 약 5m 부근까지 Gap이 형성된 것으로 분석되었다. 이후 수동토압에 의해 형성되는 (−)방향의 저항력이 깊이에 따라 증가하는 경향을 보인다.
반면 반시계 방향으로 회전하는 앵커에 의해 후면 외벽에서는 지표에 가까운 얕은 깊이에서 수동토압에 의한 저항력이 형성되지만 앵커를 밀어내는 방향(+)으로 작용하므로 전체 저항력을 감소시키는 역할을 한다. 앵커의 내측 거동은 하중이 9m깊이에 작용한 경우와 유사하게 나타나지만, 반시계 방향의 회전으로 인해 지표 가까운 곳에서는 앵커가 하중의 방향과 반대로 움직이므로 지반 반력이 크게 나타나지 않는다.
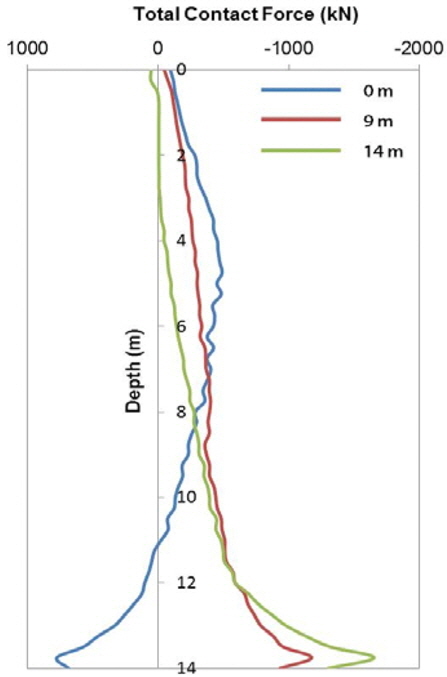
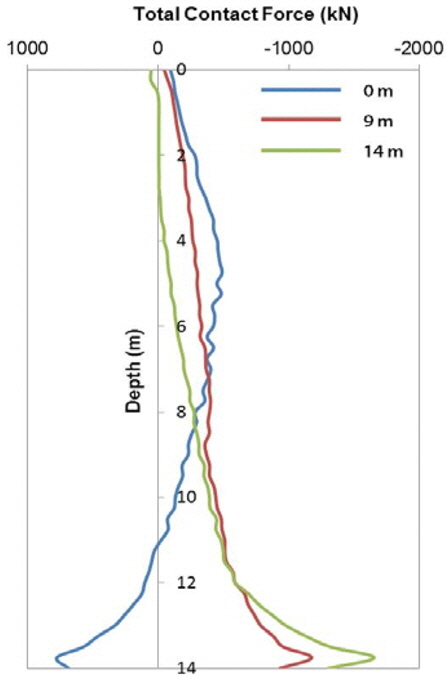
3.4.4 지반 반력의 비교
Fig. 15는 하중 재하 위치별로 앵커와 지반의 접촉면에 작용하는 연직력(CNF1)과 전단력(CSF1)을 모두 합산하여 깊이에 따라 도시한 것이다. 9m 깊이에 하중이 재하되어 최대 지지력이 발현되는 경우에는 앞서 설명한 바와 같이 전체 깊이에 대하여 증가하는 경향의 지반 반력이 형성된다. 이때의 하중 재하점을 최적 위치(Optimal loading depth)라고 정의하면, 최적위치보다 얕은 깊이에 하중이 작용하면 앵커가 회전을 동반하여 수평이 동 하므로 회전 중 심 아래에서는 반대 방향의 지반 반력이 형성된다. 또한 최적 위치보다 깊은 깊이에 하중이 작용하면 지표면 부근에서 앵커와 지반 사이의 Gap으로 인해 반력값이 0에가깝게 된다. 이때 앵커의 선단에서의 절대 값은 최적 위치인 9m에 하중이 작용한 경우보다 큰 값을 갖지만 얕은 깊이에서의 낮은 지반 반력으로 인해 전체 저항력이 감소하는 원인이 된다.
본 논문에서는 세립 사질토 지반에 설치된 석션 앵커가 수평방향의 하중을 받는 경우의 지지력을 산정하고자 하였다. 극한 수평 지지력에 대한 기준을 마련하기 위하여 이론적 방법으로써 널리 통용되는 Brinch-hansen방법과 Broms방법으로 계산하여 비교하였으며, 앵커 직경의 10%의 변위가 발생하는 경우의 저항력을 극한 수평 지지력으로 정의하였다.
기존의 이론 계산식에서는 하중이 앵커 벽체를 따라 지중에 작용하는 경우를 고려하지 않으므로, 본 연구를 통해 각 깊이별로 하중이 작용할 때의 지지력을 3D 유한요소법 해석 방법에 의해 분석하였다. 하중의 재하 위치가 깊어짐에 따라 수평 지지력이 증가하였으며 약 2/3의 위치에서 최대값을 나타냈다. 최대의 수평 저항력이 발현되기 위해서는 회전이 거의 발생하지 않고 순수하게 평행 이동해야 한다. 이때의 수평 저항력은 하중이 두부에 작용하는 경우와 비교하여 약 2.5배 큰 값을 갖는다.
앵커와 지반의 접촉면에 형성되는 지반 반력을 깊이에 따라 합산하여 수평 저항력을 산정할 수 있으므로 본 연구에서도 세 가지의 서로 다른 조건에 대한 깊이별 지반 반력을 분석하였으며 회전 조건에 의해 지반 반력의 분포가 달라지는 것을 확인하였다. 최대 지지력은 앵커가 회전 없이 평행 이동할 때, 수동 및 주동 토압에 의해 전면(Front side)과 후면(Rear side)에서 깊이에 따라 증가하는 지반 반력이 형성되는 경우 나타났다. 최대 지지력이 발현되는 하중 재하 위치인 최적 위치(Optimal depth)를 기준으로 하여 얕은 깊이와 깊은 깊이에서 각각 다른 거동을 보이며 최대지지력보다 작은 값의 수평 저항력을 가지므로 최적 위치의 산정이 중요함을 알 수 있다.
수평하중을 받는 앵커의 거동 및 최적 하중 위치는 앵커의 형상 및 지반 조건에 의한 영향을 받으므로 이에 대한 추가적인 연구가 진행되어야 할 것이다.