A supercavitation is modern technology that can be used to reduce the frictional resistance of the underwater vehicle. In the process of reaching the supercavity condition which cavity envelops whole vehicle body, a vehicle passes through transition phase from fully-wetted to supercaviting operation. During this phase of flight, unsteady hydrodynamic forces and moments are created by partial cavity. In this paper, analytical and numerical investigations into the dynamics of supercavitating vehicle in transition phase are presented. The ventilated cavity model is used to lead rapid supercavity condition, when the cavitation number is relatively high. Immersion depth of fins and body, which is decided by the cavity profile, is calculated to determine hydrodynamical effects on the body. Additionally, the frictional drag reduction associated by the downstream flow is considered. Numerical simulation for depth tracking control is performed to verify modeling quality using PID controller. Depth command is transformed to attitude control using double loop control structure.
기존의 어뢰와 같은 수중운동체는 물과 완전히 접촉한 상태로 운동하게 되며 이때 물에 의한 마찰저항으로 인해 운동속력의 한 계가 존재하게 된다. 1970년대에 들어 러시아과학자들은 수중운동체의 속력을 높이기 위한 방법을 제시하였다. 추진시스템의 향상이 아닌 물과의 접촉으로 인한 항력 자체를 줄이는 방법이다. 수중운동체를 공동(cavitation)으로 감싸 물과의 접촉면을 줄이면 마찰저항 역시 줄어들게 된다. 이러한 공동을 인위적으로 크게 만들어 물과의 접촉면을 완전히 제거하는 초공동(supercavitation) 현상을 이용하면 기존의 수중운동체가 갖는 운동속력의 한계를 극복할 수 있어 군사선진국들을 중심으로 초공동 기술에 대한 연구가 활발히 진행되고 있다. 실제로 러시아에서 개발한 초공동 수중로켓 Shkval은 운동속도가 에 이르는 것으로 알려져 있다 (Na & Lee, 2011).
최근까지 초공동 수중운동체의 동역학 모델링과 그에 관련된 링과 제어에 관한 분야에 대한 연구는 Dzielski and Kurdila (2003)에 의한 기초 연구를 시작으로 Vanek, et al. (2007), Dzielski (2011), Fan, et al. (2011)등에 의해 일정한 속도에 도달한 정상상태의 동역학 모델링 및 제어만 수행되었다. 초공동의 유체역학적 유동에 관한 연구 역시 활발히 이루어지고 있다. 초공동 수중운동체에 형성되는 부분공동(partial cavity)에 대한 연구가 Varghese (2003)에 의해 이루어졌고, 최근 중국에서는 천이영역에서 환기공동에 대한 수치해석 연구가 활발히 진행되었다. Zou, et al. (2010)은 비정상류에서 환기공동의 가스누수율에 관한 실험식을 개발하고 이를 실험과 비교하였다. 또한 부분공동과 공동 주변 유동에 의한 마찰저항감소 메커니즘이 수치해석적인 방법을 통해 연구되었다 (Xiang, et al., 2011). 초공동 유동에서뿐만 아니라 기포가 발생하는 일반적인 유동 상황에서 마찰저항 감소에 관한 연구가 수행된바 있다 (Elbing, et al., 2008).
본 연구에서는 천이영역의 특성을 고려한 초공동 수중운동체 의 동역학 모델링 및 심도제어에 관한 연구가 수행되었다. 천이영역에서의 속도 변화에 따른 영향을 고려한 초공동 수중운동체의 동역학 모델링은 공동의 모델링, 공동을 발생시키는 캐비테이터의 모델링, 운동체 후부에 위치하여 제어력을 발생시키는 핀의 모델링 그리고 유체에 의하여 운동체가 받는 유체력 모델링으로 나눌 수 있다. 각각의 모델링을 연결하여 통합 시뮬레이션을 구성하였고, 발사 후부터 속도가 증가하여 운항속도에 도달하기까지의 시뮬레이션을 통해 동역학 모델링의 물리적 타당성 및 특징에 대한 분석이 이루어졌다.
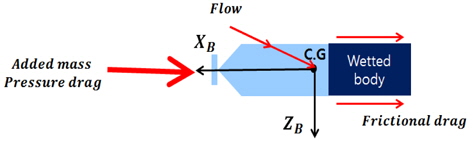
2장에서는 초공동 수중운동체의 동역학 모델링에 대해 서술하였다. 초공동 수중운동체 시스템의 좌표계를 설정하고 천이구간에서 운동체가 받는 힘과 모멘트를 분류하였다. 동역학 모델링은 공동의 모델링이 선행되었고 낮은 속도구간에서도 신속하게 공동을 형성할 수 있는 환기공동 모델을 도입하였다. 초공동 수중운동체의 제어판인 캐비테이터와 핀이 받는 유체력 모델링과 천이구간에서 부분공동에 의한 운동체 액침부에 작용하는 유체력 모델링 및 마찰저항감소 모델링이 2장에 서술되어있다. 3장에서는 천이영역구간에서 운동체가 심도명령을 추종할 수 있도록 하는 제어기 설계 및 제어구조에 대하여 서술하였다. 4장에서는 동역학 모델링 및 제어기를 통합하여 천이구간 심도제어 시뮬레이션을 수행한 결과를 나타내었다. 본 연구의 결과와 차후 연구계획 및 연구의 의의를 5장에 기술하였다.
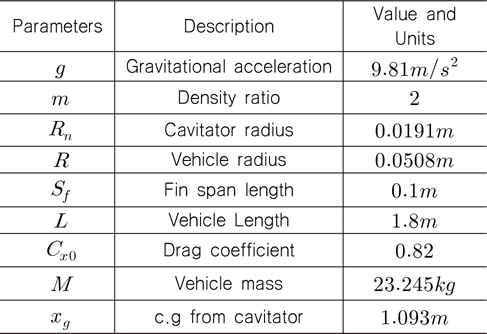
초공동 수중운동체가 발사 이후부터 정상상태에 이르기까지 운동체에 작용하는 힘과 모멘트를 결정하기 위하여 운동체를 구성하는 주요한 부분들에 대한 동역학적 모델링이 수행되었다. 초공동 수중운동체의 제원은 Dzielski and Kurdila (2003)의 논문을 참고하였고 이를 Table 1에 나타내었다. 운동체의 밀도는 일정한 값인 이고 물의 밀도와의 비율을 으로 정의한다
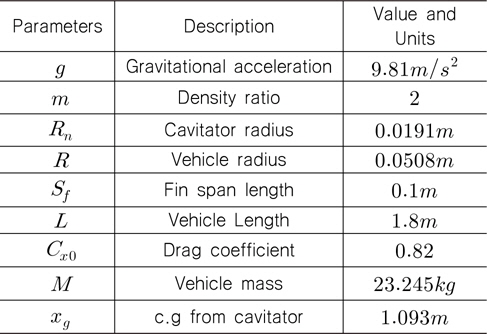
System parameters
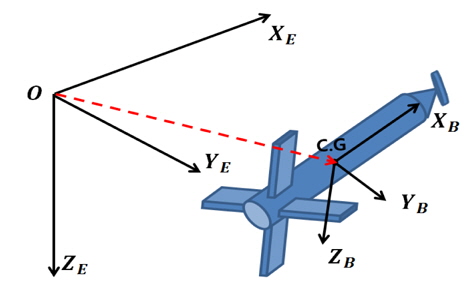
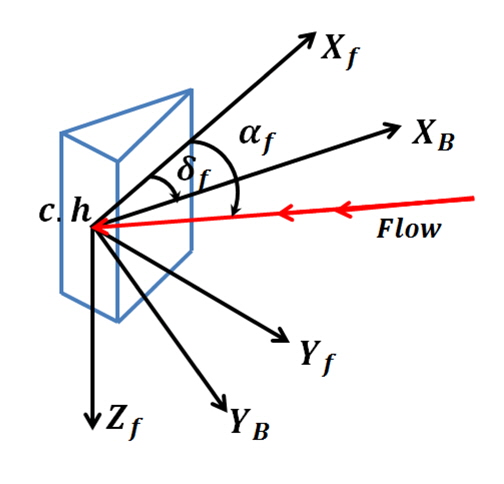
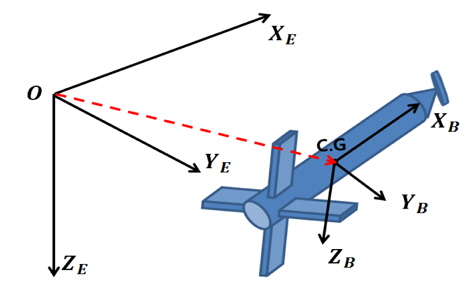
본 연구에서는 Fig. 1에 표시한 바와 같이 관성좌표계인 지구고정좌표계 o—


여기서,
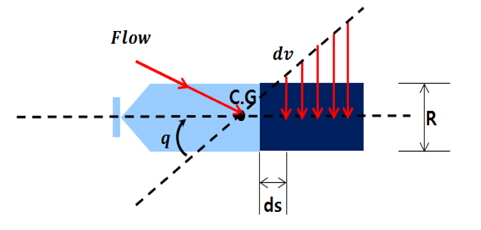
공동은 초공동 수중운동체의 동역학적 특징을 나타내는 가장 중요한 요소이다. 운동체 앞쪽에 달린 캐비테이터에 의해 생성된 공동은 캐비테이터의 운동방향과 수직인 방향으로 원을 그리며 형성된다. 공동의 전체적인 형태는 이 원을 캐비테이터 궤적에 따라 적분하여 얻어진다. 공동은 생성된 이후에 운동체의 상태와 독립적으로 팽창/수축한다는 특징이 있다. 공동의 동역학적 특징을 결정하는 중요한 파라미터는 공동수

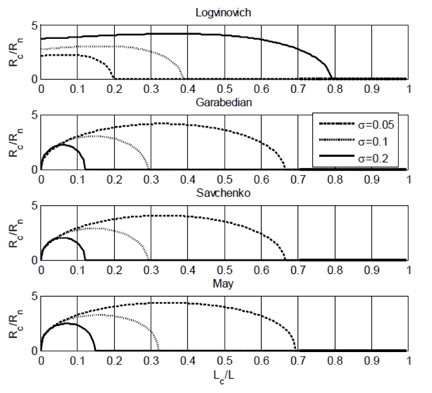
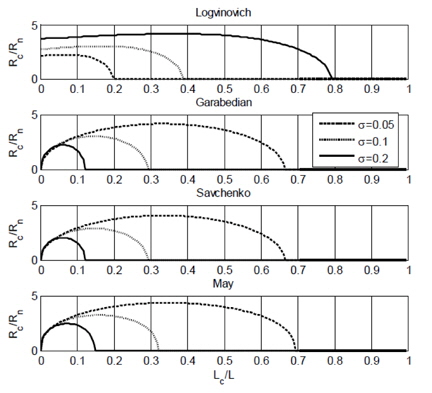
본 연구에서는 비교적 낮은 속도에서도 신속하게 공동을 형성하기 위하여 환기공동(ventilated cavitation)모델을 도입하였다. 환기공동은 캐비테이터 부근에서 가스 또는 공기를 인위적으로 분사하여 공동을 형성시키는 것이다. 공동의 형상에 대한 모델링은 Logvinovich (1972), Garabedian (1956), Savchenko (1998), May (1975) 등 여러 과학자에 의해 행해졌다. Logvinovich 모델은 가장 널리 쓰이는 공동 모델로써 공동의 단면은 캐비테이터의 궤적을 따라 팽창하고 시간이 지나면 수축하며 이는 운동체의 움직임과는 독립적으로 표현된다는 아이디어에 바탕을 두고 있다. Garabedian은 공동수와 캐비테이터 반지름에 따른 공동의 최대 길이 및 반지름을 계산하였다. 본 논문에서는 Savchenko의 공동 모델을 이용하였고 이 모델은 공동의 시작점에서부터 떨어진 거리 x에 따른 공동의 반지름을 나타낸다. Savchenko의 공동모델은 식 (4)와 같이 표현된다.

여기서, 는 캐비테이터 궤적에 수직인 방향으로 형성되는 공동의 반지름이다. 4 가지 모델에 대하여 공동수의 변화에 의한 공 동의 형상을 Fig. 2에 나타내었다. 공동수는 0.05, 0.1, 0.2의 값을 가진다. x축은 공동의 길이를 운동체의 길이로 무차원화하였고 y축은 공동의 반지름을 캐비테이터의 반지름으로 무차원화하였다.
환기공동의 경우 공동수를 구하는 식은 Logvinovich and Syeryebryakov (1975)의 식을 따랐고 이를 식(5)에 나타내었다.

여기서


캐비테이터는 디스크 형태로 피치축(Y축)으로만 회전하는 1자유도 운동을 한다. 캐비테이터의 전면부는 물과 접촉으로 인해 항력 및 양력을 발생시켜 운동체를 제어함과 동시에 공동을 형성 한다. 캐비테이터에 의한 항력계수(




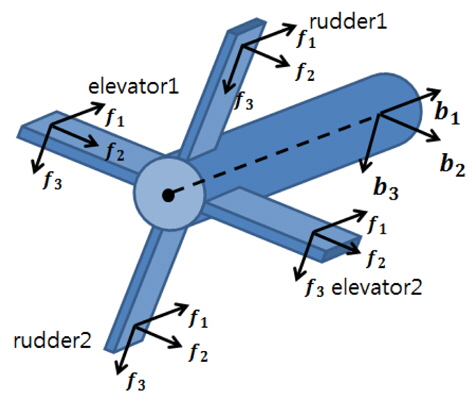
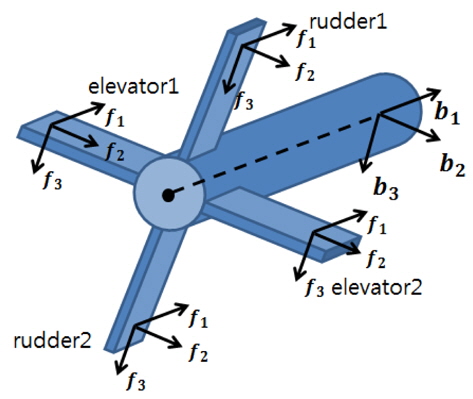
핀은 Fig. 3에서 볼 수 있듯이 수중운동체 뒷부분에 열 십자(+) 모양으로 4개가 달려있으며 수평핀을 엘리베이터, 수직핀을 러더로 명명한다. 핀에 의한 힘과 모멘트는 핀좌표계에서 식 (11), (12)와 같이 표현된다. 힘과 모멘트계수는 Kirschner, et al. (2002)의 실험값을 보간법을 사용하여 구하였다.


여기서
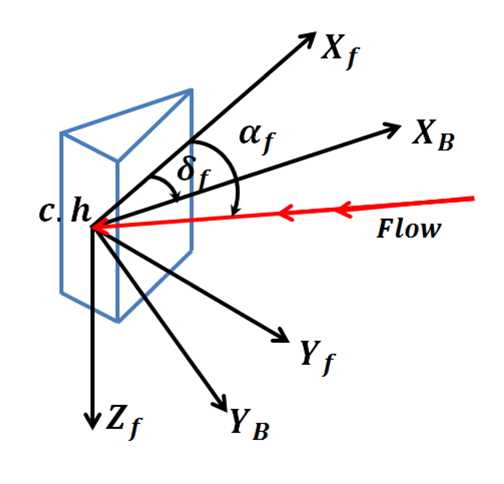
핀에 작용하는 힘과 모멘트는 핀의 받음각(



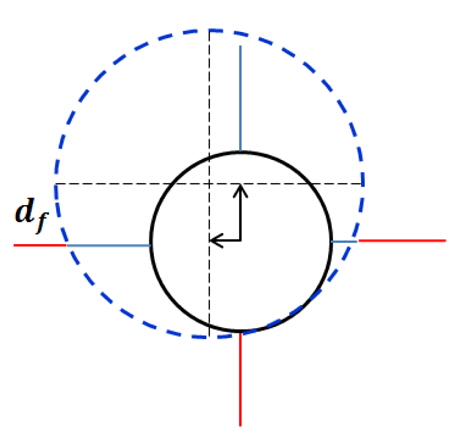
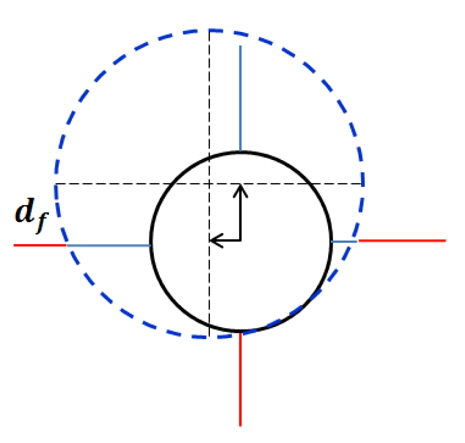
핀에 의해 발생하는 힘과 모멘트는 앞에서 언급한 바와 같이 받음각과 핀의 액침깊이에 따라 결정된다. 물에 잠겨 액침이 일어난 부분은 식 (11), (12)와 같은 힘과 모멘트를 발생시키는 반면 액침이 되지 않은 부분, 즉 공기에 노출되어 있는 부분은 힘과 모멘트를 발생시키지만 그 크기는 매우 작다. 본 연구에서는 물에 완전히 잠겨있는 부분에서만 핀의 양력과 항력이 발생한다고 가정하였다. Fig. 5은 운동체 뒤에서 바라본 공동의 중심과 운동체 및 핀의 위치에 따른 액침을 나타낸다. 둥근 점선은 핀의 뿌리부분에서 바라본 공동의 단면이고 실선은 운동체의 몸통이다.
그림에서 알 수 있듯이 핀의 액침은 공동의 중심과 반지름 및 운동체의 중심을 이용하여 구할 수 있다. 공동의 중심을 구하기 위해서는 캐비테이터의 궤적과 부력에 의한 효과를 고려해야 한다.
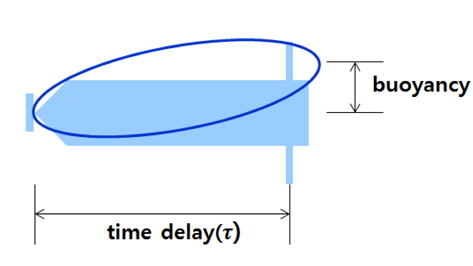
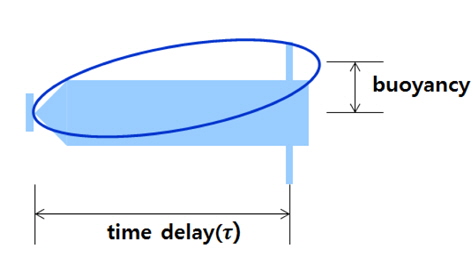
Fig. 6은 캐비테이터에서 생성된 공동이 핀의 뿌리부분에 오면서 부력에 의해 상승하는 모습을 보여준다. 공동의 중심은 캐비테이터의 궤적과 일치한다. 하지만 공동이 생성되어 핀의 뿌리부분까지 오는데 걸리는 시간
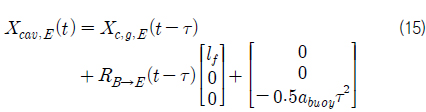
여기서,
초공동 수중운동체가 천이영역을 지날 때 부분공동에 의해 물과의 접촉이 일어나고 이로 인해 유체력을 받게 된다. 운동체 액침부위에 작용하는 유체력은 부력에 의한 힘과 모멘트, 압력저항 및 마찰저항, 부가질량에 의한 영향 등이 있다. 정유체력인 부력의 크기는 식 (16)와 같이 표현되며 운동체의 액침 부피에 의해 결정된다. 식 (17)은 몸통좌표계에서 표현한 부력에 의한 힘과 모멘트이다. [

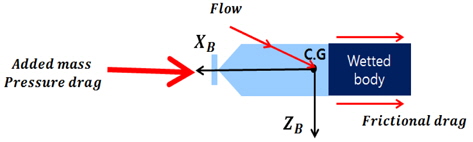
본 논문에서는 천이구간에서 운동체에 작용하는 동유체력을 작용하는 방향에 따라 2가지로 분류하였다. 초공동 수중운동체는 Y축과 Z축에 작용하는 동유체력에 대해서는 동일한 형상을 가지기 때문에 X축에 작용하는 동유체력과 Y, Z축에 작용하는 동유체력으로 분리하여 모델링을 수행하였다.
Fig. 7은 X축방향으로 작용하는 동유체력을 보여준다. X축 방향으로 작용하는 동유체력 중 부가질량에 의한 동유체력과 압력저항은 캐비테이터에만 작용한다. 캐비테이터에 작용하는 동유체력은 2.3절에서 서술하였다. 운동체 침수부에 작용하는 압력저항은 캐비테이터에 작용하는 압력저항에 비해 매우 작기 때문에 무시하였다. 마찰저항은 운동체 몸체의 침수부에 작용하며 Hughes line (Newman, 1977)을 통해 계산할 수 있다. 식 (18)은 마찰저항의 크기를 나타내며 식 (19)은 Hughes line을 통해 구한 마찰 저항계수를 나타낸다.


Re는 레이놀드수이다.
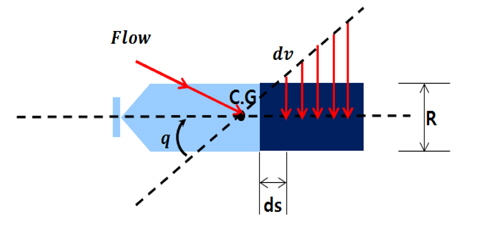
Y,Z축에 작용하는 동유체력은 모리슨 방정식을 통해 계산하였다 (Newman, 1977). 모리슨 방정식은 식 (20)와 같이 표현된다.

여기서

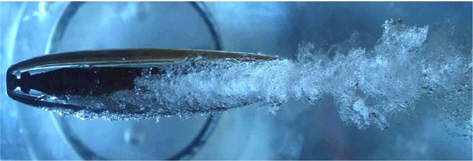
Fig. 9과 같이 공동 후류의 유체는 완전한 물이 아닌 물과 공기가 섞여있는 형태이다. 따라서 공기 기포에 의한 마찰저항감소를 고려해야 한다.
공동에서 떨어져나온 기포의 시간당 부피를 가스누수율로 정의하였다. 가스누수율은 Logvinovich (1972)의 실험식을 통해 식 (22)와 같이 표현할 수 있다.

여기서

공동의 크기 및 길이를 정의하는데 이용되는 공동수는
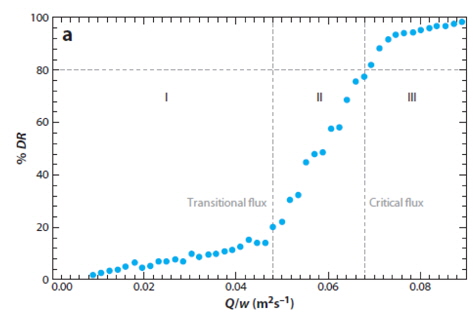
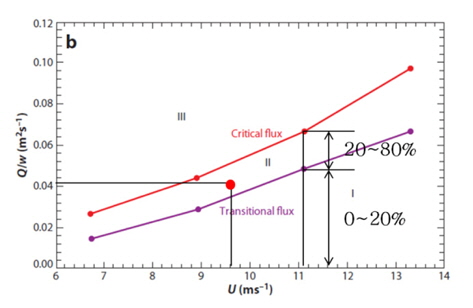
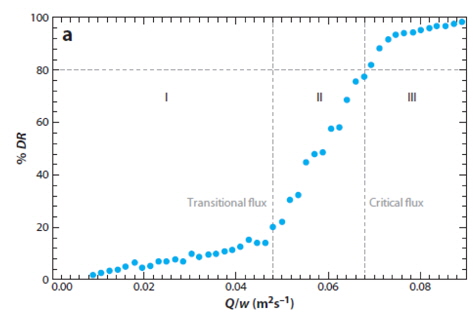
수중운동체에 가스를 공급할 때 일어나는 마찰저항의 감소는 Elbing, et al. (2009)의 실험을 적용하였다. Fig.10은 공급하는 가스의 부피에 따른 마찰저항의 감소율을 보여준다. x축은 가스공급율을 마찰저항을 받는 부분의 단면 길이로 나눈 값이다. y축은 마찰저항의 감소율이다. Elbing의 연구에 따르면 마찰저항의 감소는 3가지 영역으로 나누어진다. Fig. 10를 통해 단위 길이당 가스공급율이 커지면 마찰저항감소율 또한 커짐을 확인할 수 있으며 각 영역에서 마찰저항의 감소율은 선형적으로 증가함을 확인할 수 있다. 각 영역별 가스 감소율은 0~20%, 20%~80%, 80%~100%이다.
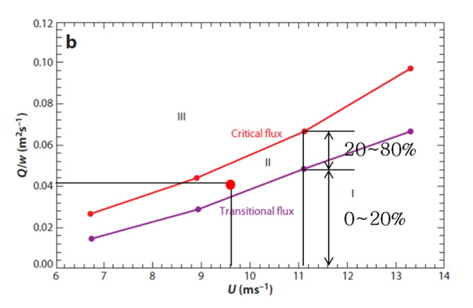
Fig. 11는 단위길이당 가스공급율과 속도에 따른 마찰저항감소 영역을 나타내었다. 액침부위의 유체속도와 가스공급율을 통해 마찰저항감소 영역을 결정하고 영역 내에서 선형보간을 통해 마찰저항감소율을 계산하였다. 마찰저항의 감소가 일어나지 않은 경우의 마찰저항은 식 (18)와 같다.
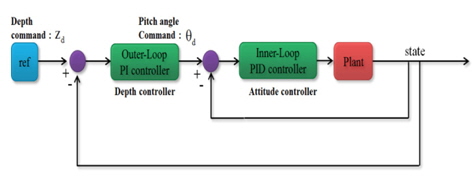
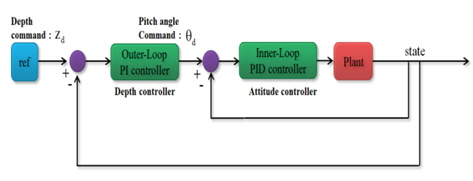
초공동 수중운동체의 동역학 모델링을 시뮬레이션을 통해 분석하기 위하여 제어기를 설계하였다. 본 연구의 목적은 초공동 수중운동체의 동역학 모델링이기 때문에 간단한 PID제어기를 통해 운동체를 제어하였다. 제어입력은 캐비테이터만을 사용하였다. 본 연구에서는 초공동 수중운동체의 심도 및 자세를 제어하기 위하여 이중루프 구조를 통한 제어시스템을 구성하였다. Fig. 12에서 볼 수 있듯이 운동체는 내부루프와 외부루프 두 가지 피드백루프에 의해 제어된다. 내부루프는 PID제어기를 사용하여 운동체의 자세(종동요각)을 제어하고 외부루프는 PI제어기를 통하여 원하는 심도를 추종하기 위한 자세명령을 생성한다.


여기서
외부루프의 PI제어기는 심도오차()를 종동요각명령으로 바꾸어주는 전달함수의 역할을 한다. 심도오차는 식 (26)과 같이 표현되며 식 (27)는 주파수영역에서 심도오차와 종동요각의 전달함수를 표현한 식이다.



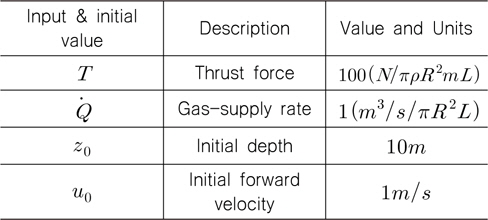
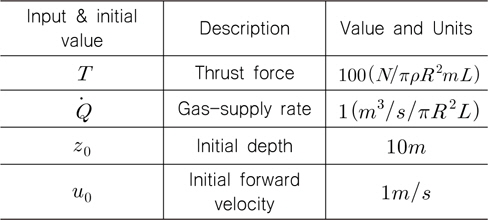
초공동 수중운동체의 천이구간 동역학 모델링 및 제어기의 성능검증을 위해 시뮬레이션이 수행되었고 MATLAB/SIMULINK R2013a버전을 이용하여 프로그래밍하였다. 시뮬레이션은 개루프와 폐루프에 대하여 각각 수행하였다. 시뮬레이션에 사용된 입력값과 초기값을 Table 2에 나타내었다.
[Table 2] Input and initial values for simulation
Input and initial values for simulation
추력은 수중운동체와 같은 반지름을 갖는 실린더의 질량
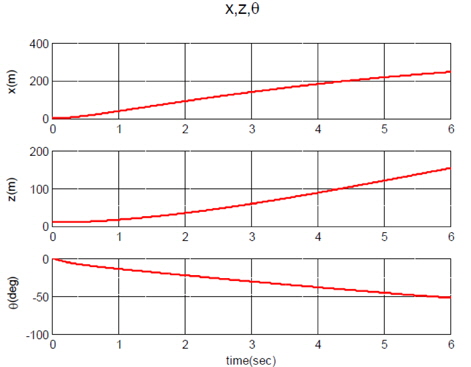
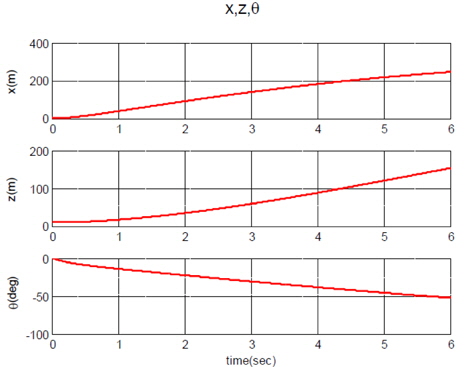
Fig. 13는 x,z방향 위치와 종동요각의 개루프 시뮬레이션 결과를 보여준다. 전진속도에 의해 x방향 위치는 계속해서 증가하고 종동요각은 음의 값을 가지며 증가한다. 이 때문에 심도 역시 깊어지는 것을 알 수 있다. 종동요각이 음의 값을 가지는 이유는 공동이 초공동상태에 도달하지 못하여 발생하는 운동체 후부의 액침에 의한 부력의 영향이다.
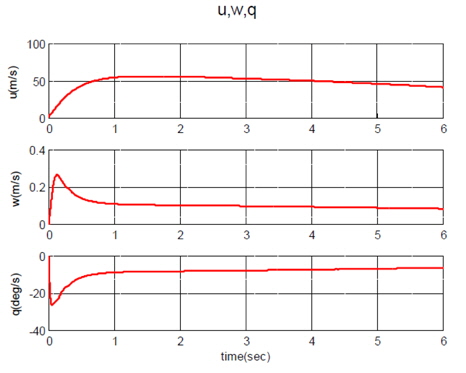
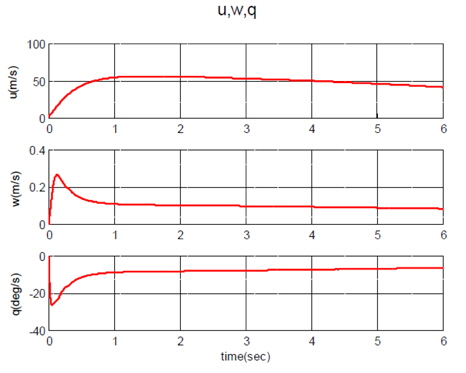
Fig. 14에 전진속도와 상하동요속도 및 종동요각의 변화율을 나타내었다. 종동요각 변화율과 상하동요속도는 반응초기 큰 값을 가지다가 핀과 캐비테이터에서 발생되는 복원력의 영향으로 점점 줄어들게 된다.
초공동 수중운동체의 천이구간 및 초공동 구간까지의 심도제어 시뮬레이션을 수행하였다. 시뮬레이션 시나리오는 다음과 같다.
(1) 1차제어 : 천이구간에서 작용하는 힘과 모멘트를 제어하여 초 기심도 를 유지
(2) 2차제어 : 천이구간을 지나 운동체의 자세 및 심도가 안정되 면 목표심도 를 추종하는 제어 수행
1차제어시기와 2차제어 시기를 나누어 제어를 수행한 이유는 1차제어시기에는 공동이 완전히 생성되지 않기 때문에 무리한 심도 변경은 오히려 비효율적인 제어가 될 수 있고 실제로 초공동 수중운동체의 활용에 있어 목표심도는 초기심도에서 크게 벗어나지 않는 범위이기 때문이다. 2차제어를 통해 심도변경제어를 통해 초공동 수중운동체의 조종성능을 확인할 수 있다
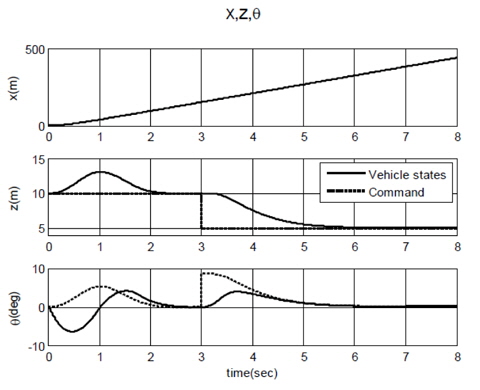
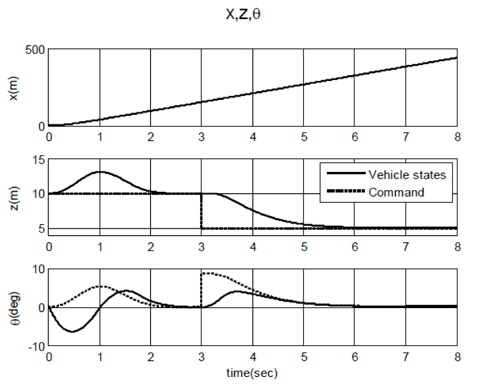
Fig. 15는 수중운동체의 위치와 종동요각의 시간에 따른 변화를 보여준다. 점선은 심도명령과 종동요각명령을 나타낸다. 1차 제어는 약 3초까지 수행되며 초기에 생성되는 불안정한 힘과 모멘트를 캐비테이터를 통해 발생하는 제어력으로 상쇄시켜 심도를 유지하는 것을 볼 수 있다. 3초 이후에는 2차 제어가 이루어지면서 심도가 로 변경된다. 현재심도보다 낮은 심도로 가기 위하여 종동요각을 양의 값으로 변경시키는 것을 알 수 있다.
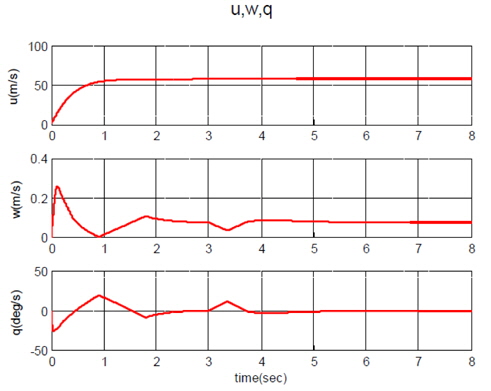
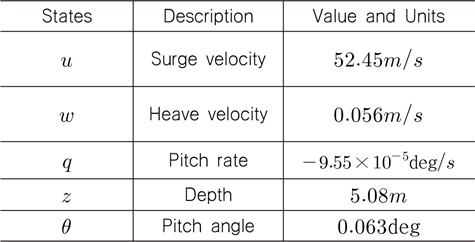
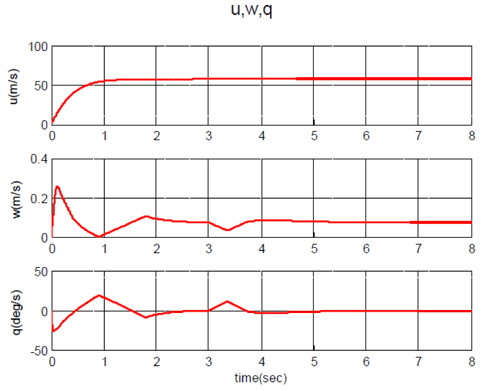
Fig. 16는 수중운동체의 속도 및 종동요각변화율을 보여준다. 정상상태에서 종동요각의 변화율이 0에 수렴할 때 상하동요속도가 0이 아닌 이유는 정상상태에서 운동체의 종동요각이 0이 아닌 값을 갖기 때문이다. 2차제어 이후 운동체가 정상상태에 도달했을 때 트림값을 Table 3에 나타내었다. 종동요각은 를 정상상태로 갖는다.
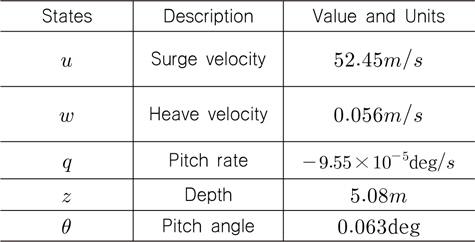
Trim values
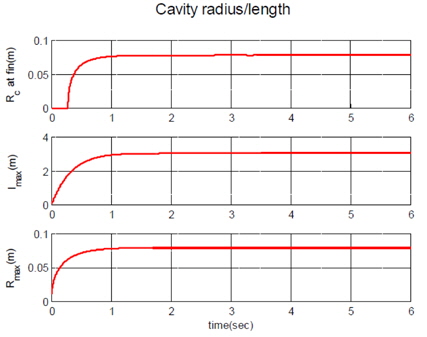
Fig. 17의 첫 번째 그래프는 핀뿌리부분에서 공동의 반지름이고 두 번째와 세 번째 그래프는 공동의 최대 길이와 반지름이다. 핀뿌리부분에서 공동의 반지름을 통해 공동이 핀에 도달할 만큼 발달했는지를 판별할 수 있으며 시뮬레이션 시간 약 0.2초정도에 핀뿌리부근에서 공동의 반지름이 0이 아닌 값을 가진다. 비슷한 시간에 두 번째 그래프에서 공동의 최대 길이는 운동체의 길이인 보다 길어지게 되며 초공동상태에 이르렀음을 알 수 있다. 세 번째 그래프를 통해 공동의 최대 반지름이 운동체의 반지름보다 큰 값을 가지며 공동은 운동체를 완전히 감싸고 있는 형태임을 알 수 있다.
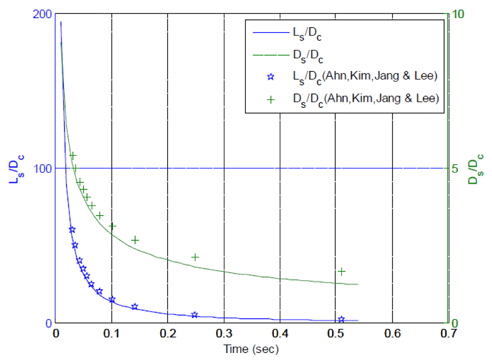
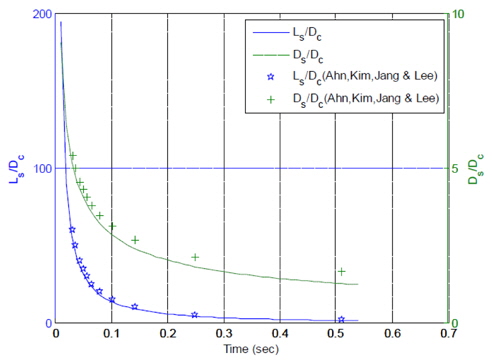
Fig. 18은 공동수에 따른 공동의 길이(
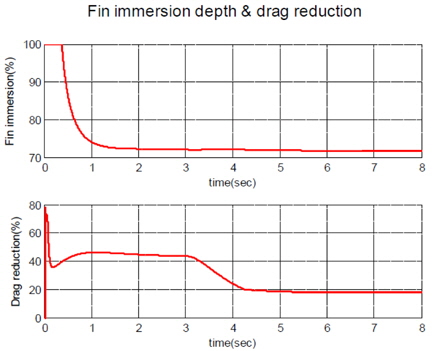
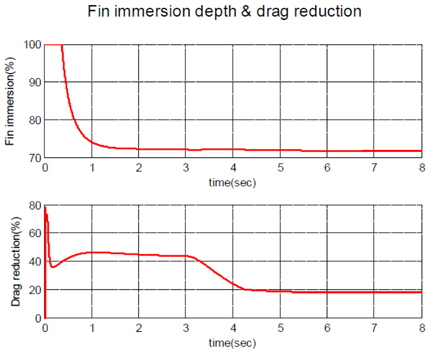
Fig.19은 핀의 액침과 마찰저항감소율을 나타낸다. 핀의 액침은 핀의 전체길이 중 물에 잠긴 길이를 비율로 나타내었다. 반응 초기에는 핀이 완전히 물에 잠겨있다가 공동이 완전히 형성된 이후에는 약 72%의 액침을 가진다. 마찰저항의 감소율은 운동체의 속도와 가스누수율에 따라 결정된다. 식 (22)에 의해 가스누수율은 심도가 깊어지면 줄어드는 경향을 보이고 이를 3초이후 마찰저항감소율의 감소를 통해 확인할 수 있다.
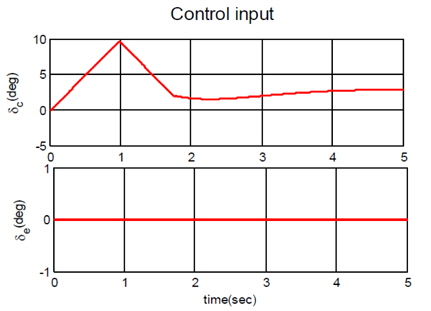
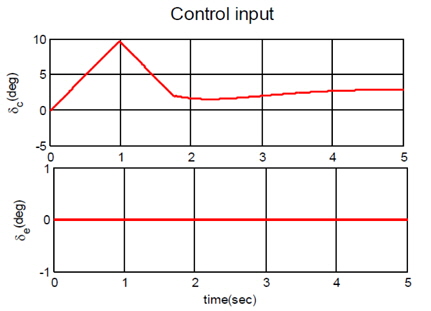
Fig. 20은 시간에 따른 제어입력의 변화를 보여준다.
본 연구에서는 초공동 수중운동체의 천이영역 및 정상상태 동역학 모델링과 자세제어 및 심도제어에 관한 연구를 수행하였다. 시뮬레이션을 통해 다음의 사실들을 확인할 수 있었다.
(1) 초공동 수중운동체의 천이구간 동역학 모델링이 물리적으로 타당하게 수행되었다.
(2) 개루프 시뮬레이션 결과를 통해 천이구간의 운동특성을 확인하였고 폐루프 시뮬레이션 결과를 통해 이중루프구조를 적용한 천이구간제어 및 심도변경제어가 가능함을 확인하였다.
(3) 비교적 낮은 속도구간에서도 환기공동을 통해 공동의 신속한 생성이 가능하다.
(4) 초공동 수중운동체는 천이구간 및 초공동상태를 지나 정상상태에 도달한 후 일정한 트림값을 가진다.
초공동 수중운동체의 동역학 모델링을 수행하는 과정에 있어 가정 및 한계점은 다음과 같다.
(1) 환기가스공급율은 천이구간에서 신속한 초공동의 형성이 가능한 수치로 결정하였고 환기가스공급율에 따른 진동과 같은 안정성 문제는 고려하지 않았다.
(2) 제어기설계 시 동역학적 모델링의 불확실성은 없다는 가정하에 제어기를 설계하였다.
본 연구에서는 캐비테이터만을 이용한 제어를 수행하였다. 차후 천이구간의 과도응답개선을 위하여 핀과 추력벡터를 추가 제어판으로 사용하고 본 연구에서 수행된 심도제어 이외에도 방위각 및 좌우동요 제어가 연구될 수 있다. 또한 캐비테이터와 핀 및 운동체의 기본 제원을 결정하는 최적형상설계와 환기, 추진시스템 등을 결정하는 최적설계를 위한 기초연구로 이용될 수 있다.