A two-dimensional particle image velocimetry (2D PIV) system in a towing tank is employed to measure a wake field of a very large crude oil carrier model with rotating propeller in self propulsion condition, to identify characteristics of wake of a propeller working behind a ship. Phase-averaged and time-averaged flow fields are measured for a horizontal plane. Scale ratio of the model ship is 1/100 and Froude number is 0.142. By phase-averaging technique, trajectories of tip vortex and hub vortex are identified and characteristic secondary vortex distribution is observed in the hub vortex region. Propeller wake on the starboard side is more accelerated than that on the port side, due to the difference of inflow of propeller blades. The hub vortex trajectory tends to face the port side. With the fluctuation part of the phase-averaged velocity field, turbulent kinetic energy (TKE) is also derived. In the center of tip vortex and hub vortex region, high TKE concentration is observed. In addition, a time-averaged vector field is also measured and compared with phase-averaged vector field.
선박의 추진 성능 향상에 있어 선박의 운항 목적과 환경에 맞는 프로펠러를 설계해 높은 효율로 작동하게 하는 것은 가장 기초적이며 중요한 부분이다. 그리고 선미의 유동장에 대한 연구 또한 프로펠러 자체의 설계만큼 중요한 부분인데, 프로펠러 유입류의 개선을 통해 프로펠러의 작동 효율을 증가시키거나 진동, 소음의 감소를 꾀할 수 있기 때문이다. 이처럼 높은 추진 효율을 가지면서 동시에 진동이 적은 선체와 프로펠러 형상은 선박 설계의 중요한 목표로 항상 요구되어 온 만큼 전통적인 저항추진시험을 통한 연구 이외에도 선미에서 작동 중인 프로펠러 주위의 유동장에 대한 연구가 수행될 필요가 있다. 또한 이렇게 얻어진 프로펠러 후류 유동장 정보는 후류 유동장을 이용해 추가적인 추력을 얻는 선박의 연료절감장치(Energy Saving Device)의 설계에 중요한 자료로 활용될 수 있기 때문에 선미 유동장에 대한 연구의 중요성이 대두되고 있다.
일반적으로 유동장 계측을 위한 장비로는 피토관이 활용되었다. 하지만 피토관은 기본적으로 속도장의 시간평균을 구하기 위한 계측 장비이기 때문에 프로펠러가 일정한 속도로 회전하며 만들어내는 주기적인 요동 성분을 계측할 수 없다는 문제가 있어 프로펠러 후류에 대해 속도장의 시간 평균을 통한 제한적인 연구만을 수행할 수 있었다(Kim, et al., 1997; Van, et al., 2003). 따라서 주기성을 가지는 속도장에 대한 연구를 위해 순간 속도장을 계측할 수 있는 입자영상유속계(Particle Image Velocimetry, PIV)나 레이저 도플러 유속계(Laser Doppler Velocimetry, LDV)와 같은 광학적 기법이 도입되어 선미 유동장 계측에 활용되었다.
LDV는 점계측 방식으로 전체 유동장에 대한 속도장 계측을 수행하려면 많은 시간이 소요되지만 높은 계측 정확도와 시간 분해능을 가진다. 그리고 비 접촉식의 광학적인 계측 방식이기 때문에 피토관의 배치가 어려운 위치의 속도장을 계측할 수 있다는 장점이 있어서 프로펠러의 후류(Felli, et al., 2002), 모형선에 장착된 프로펠러 전후방의 유동장(Felli & Di Felice, 2005) 등의 계측에 활용되었다.
이와 대조적으로 PIV는 LDV에 비해 구성 장비의 배치가 어렵지만 특정 평면이나 공간의 속도장을 한번에 계측할 수 있기 때문에 실험 시간을 크게 절약할 수 있다는 장점이 있다. 다만 실험환경 조성을 위한 구성 장비 배치의 용이성 때문에 PIV를 이용한 프로펠러 후류 연구의 상당 부분은 회류수조나 공동수조에서 이루어져왔다. 공동 수조나 회류수조에서 PIV를 이용한 대표적인 프로펠러 유동장 계측 사례로는 프로펠러가 없는 상태의 선미 유동장(Lee, et al., 2009), 프로펠러의 후류(Di Felice, et al., 2004; Lee, et al., 2004; Paik, et al., 2007; Paik, et al., 2010), 프로펠러가 작동중인 상태의 선미 유동장(Di Felice, et al., 2001; Paik, et al., 2004; Calcagno, et al., 2005; Paik, et al., 2005) 등이 있다. 하지만 공동수조나 회류수조는 모형의 스케일이 제한되며 측벽효과 등을 무시할 수 없는 만큼 더 정확한 유동장 계측을 위해 예인수조에서 실험이 수행될 필요가 있다. 예인수조 PIV 시스템의 성능 확인을 위해 Anschau and Mach(2007)는 예인수조에서 스테레오스코픽 PIV 시스템을 이용하여 프로펠러 후류를 계측한 바 있다.
이처럼 PIV 시스템은 프로펠러에서 발달된 비정상 유동장의 계측에 적용되어 많은 성과를 얻고 있다. 특히 예인수조 시설에서는 일반적으로 사용되는 피토관과 비교하여 전체 실험 시간의 감소, 계측 정확도 및 공간 해상도에서의 발전을 꾀할 수 있기 때문에 그 적용 가능성이 더욱 부각된다 하겠다.
본 연구에서는 선미에서 발달된 3차원 난류 유동장 안에서 작동하는 프로펠러의 후류의 특성을 파악하기 위해 예인수조 시설에서 자항 상태로 예인중인 KVLCC2 선형의 프로펠러 후류를 2차원 PIV로 계측하여 그 결과를 분석하였다. 위상별 평균 속도장과 시간 평균 속도장을 각각 얻어 그 결과를 비교하였으며, 추가로 와도, 난류 운동 에너지(Turbulence Kinetic Energy, TKE)를 얻어 날개 끝 와동과 허브 와동의 진행 경로를 파악하고 선미 좌우현에서 각각 발달되는 프로펠러 후류의 유동 특성을 정량적으로 분석하였다.
본 연구를 위한 유동장 계측은 서울대학교 예인수조에서 수행되었다. 서울대학교 예인수조는 길이 110m, 폭 8m, 깊이 3.5m의 수조와 최대 속도 5m/s의 예인전차로 구성되어 있다. 모형선의 선미 방향을 +x, 우현 방향을 +y, 위 방향을 +z로 하는 오른손 좌표계가 적용되었다. 예인전차의 속도 제어는 최대 속도의 0.2%의 속도 범위에서 이루어진다. 예인전차에는 모형선과 2차원 PIV 시스템이 설치되었다.
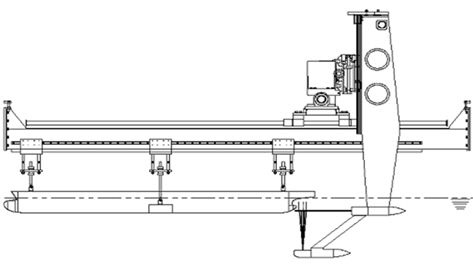
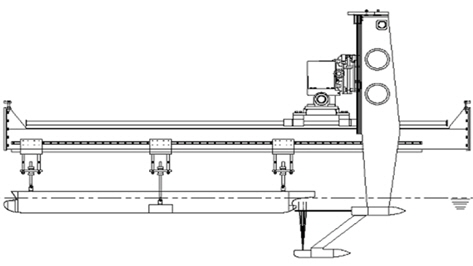
본 연구의 목적이 좌우현에서 각각 나타나는 프로펠러 후류의 특성을 파악하는 것인 만큼 프로펠러의 날개 끝에서 발달되는 와동을 포함하는 평면의 유동장을 계측할 수 있는 시스템이 요구되었다. 따라서 현재 예인수조에서 x-y 평면 상의 유동장 계측을 수행할 수 있는 2차원 PIV 시스템을 이용하여 프로펠러 날개 끝 와동이 계측면 상에 나타나도록 하였다. Fig. 1은 예인수조용 2차원 PIV시스템과 모형선의 배치도이다. PIV 시스템은 덴마크의 Dantec Dynamics에서 제작되었으며 시스템을 이루는 광학적 요소인 레이저, 카메라는 모두 유선형의 방수 케이스 안에 배치되어 이송장치에 연결되었다.
광원으로 사용된 레이저는 New wave사의 Solo PIV III Nd:YAG 레이저로 최대 출력 50mJ이며 레이저 시트의 두께는 2mm이다. 카메라는 Dantec Dynamics의 Flowsense 2.0M으로 200만 화소, 10bit의 밝기 정보로 기록된 입자영상을 30Hz로 촬영할 수 있다. 본 연구에서는 Two-frame PIV 기법이 활용되었기 때문에 1초에 15장의 속도장을 얻어낼 수 있었다. 카메라와 레이저 시트 간의 거리는 600mm인데 카메라에 Nikkor 50mm f1.4 렌즈를 장착하여 얻어진 관측 평면의 크기는 102mm×76mm이다. 추적 입자로는 평균 지름 27μm의 폴리아미드 입자를 사용하였다.
이미지의 촬영과 해석을 위해 Dantec Dynamics에서 제작한 Dynamic studio V3.2를 이용하였다. 프로펠러의 위상 평균 계측 조건에서는 각 100쌍의 입자영상을 촬영해 해석을 수행하였으며 시간 평균 조건에서는 14.5Hz로 500쌍의 입자 영상을 촬영하였다. 이렇게 얻어진 입자영상은 우선 128×128픽셀의 조사구간에 대해 상호상관법을 적용하고 이를 바탕으로 64×64픽셀의 조사 구간을 거쳐 최종적으로 32×32픽셀, 50%의 오버랩으로 조사구간을 줄여가는 멀티패스 기법이 사용되어 속도 벡터를 얻었다. 각 단계마다 주위 벡터와의 크기 비교를 통해 에러 벡터를 삭제하는 필터링 과정이 수행되었다. 모든 경우 조사구간은 50%의 오버랩을 가지는데 이렇게 얻어진 속도 벡터는 약 7000개로 1mm×1mm의 평면에 하나의 대표벡터를 갖는 정도의 수준이다
이 시스템에서 얻어지는 입자 변위에 대한 불확실성은 균일류 계측 결과와 ITTC의 불확실성 해석 절차 (ITTC, 2008)를 따라 추산되었으며 균일류 계측에서 얻어진 최대 입자 변위에 대한 비율로 무차원화되어 Table 1에 나타내었다. 불확실성 해석 결과 고정 오차(Systematic Error)의 비율이 크게 나타났는데 이는 프로펠러 후류의 3차원 유동에서 비롯되는 계측면에 수직인 방향의 유동 성분으로 인한 것이다.
[Table 1] Uncertainty assessment results for particle displacement

Uncertainty assessment results for particle displacement
PIV 계측을 통해 얻어진 속도와 TKE는 각각 예인 속도와 예인 속도의 제곱으로 나누어 무차원화하였다. 난류 성분은 등방성을 가질 것으로 가정하여 z 방향 요동 성분은 x, y 방향 요동성분의 평균값으로 대체하였다.
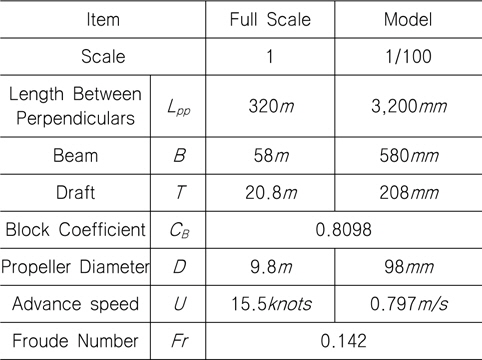
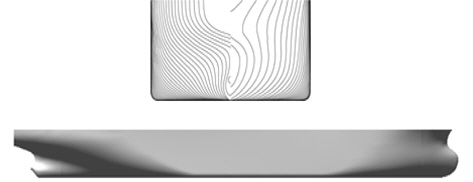
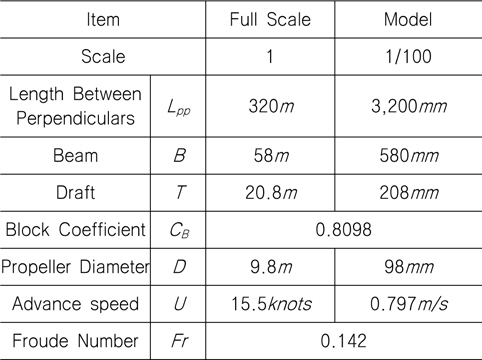
실험에 사용된 선형은 Kim, et al.(2001)의 연구에서 사용된 KRISO Very Large Crude Oil Carrier 2 (KVLCC2) 선형으로, 축척비는 1/100이다. 선형의 자세한 정보는 Table 2에 기재되어 있으며 선형은 Fig. 2에 소개되어있다. KVLCC2 선형은 높은 방형계수(block coefficient)를 가지고 있는 만큼 선미의 형상 변화가 급격하여 y, z 방향 유동 성분의 크기가 다른 선형에 비해 상대적으로 크게 나타난다. 따라서 이들 유동 성분이 좌우현의 프로펠러 후류에 미치는 영향이 더욱 뚜렷하게 나타날 것으로 기대하였다
[Table 2] Principal dimensions of KVLCC2
Principal dimensions of KVLCC2
선체의 표면은 레이저 시트의 반사를 줄이기 위해 무광 검정으로 도색되었으며 ITTC의 기준을 따라 스테이션 19와 선수 벌브에는 난류 촉진을 위한 스터드를 부착하였다. 모형선은 예인 중에도 자세가 정수 중의 정지 상태와 동일하도록 고정하였다. 실험이 수행된 프루드 수(Froude number)는 0.142인데 이는 실선 기준으로 15.5knots의 항주속도에 대응된다. 이 때 모형선의 수선 간 길이와 예인 속도를 바탕으로 얻어진 레이놀즈 수 (Reynolds number)는 2.3 × 106이다.
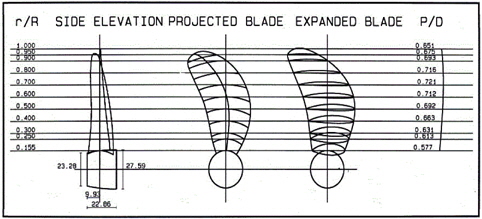
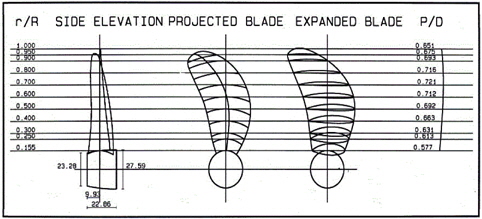
실험에 사용된 프로펠러는 Kim, et al. (2001)의 연구에서 사용된 KP458 프로펠러로, KVLCC 선형을 이용한 연구에 사용된 바 있다. Fig. 3은 KP458 프로펠러의 형상이다. 실험을 위해 프로펠러의 표면 또한 무광 검정으로 도색되었다. 본 실험에서는 선미 유동장의 영향을 받은 프로펠러 후류의 전체적인 특성을 파악하는 것이 주된 목적이므로 프로펠러 후류에 영향을 미치는 방향타는 부착하지 않았다. 프로펠러 허브 캡은 국내 조선소에서 유사한 선형에 적용되도록 설계된 형상을 단순화하여 프로펠러 허브 지름과 동일한 길이의 원기둥 형태로 제작하였으며, 프로펠러는 예인력을 고려한 자항시험을 통해 얻어진 회전수인 12rps로 회전시켰다.
모든 길이 차원은 모형 스케일의 프로펠러 반지름인 49mm로 나누어 무차원화를 수행하였다. 계측은 z = 0인 수평면에서 x = 0R ~ 4.0R, y = −1.5R ~ 1.5R, 의 구역에 대해 이루어졌는데 관측 평면 크기의 한계로 전체 계측면을 6개로 나누어 각각 계측 한 뒤 하나로 합쳐 나타냈다.
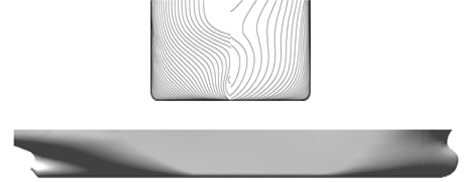
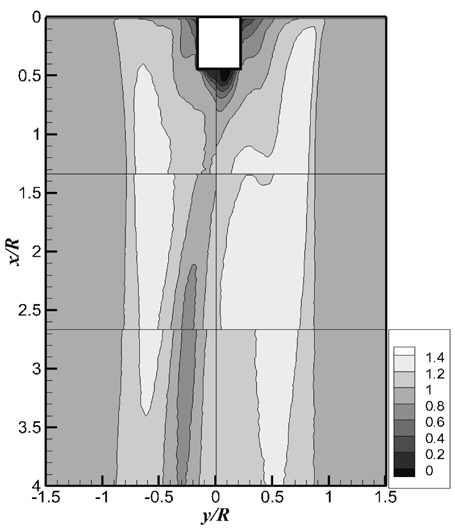
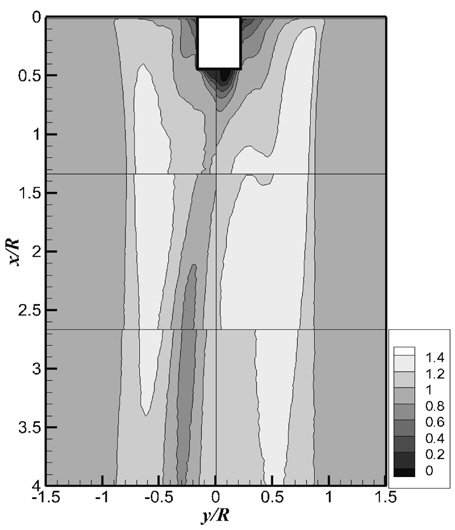
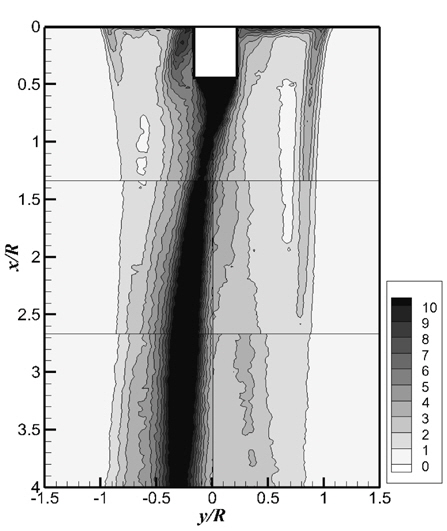
우선 프로펠러의 위상별 각도를 고려하지 않은 시간 평균의 유동장을 구하여 프로펠러 후류의 전체적인 특성을 파악하였다. Fig. 4는 계측면의 x 방향 속도 분포이다. 프로펠러의 영향을 받은 후류 영역의 유동은 y/R = ±1.0 경계 바깥의 유동에 비해 높은 유속이 나타났는데 후류의 가속 정도는 우현에서 더 뚜렷이 나타났다. 이는 회전하는 프로펠러의 유입류에서 +z 방향의 유동성분이 좌현과 우현에서 프로펠러 날개에 대해 반대 방향으로 작용하기 때문인데 축을 중심으로 회전중인 프로펠러 날개는 우현에서 더 큰 받음각과 유입류 속도를 얻게 된다. 따라서 프로펠러 후류는 우현에서 더 높은 압력을 받아 가속되며 이는 프로펠러후류 유동장의 허브를 따라 형성된 저속 구간이 좌현으로 굽는 현상에서도 확인할 수 있다.
이와 유사한 현상을 x-z 평면의 유동장에서도 예상할 수 있는데 낮은 반류비로 인해 더 큰 하중이 걸리는 z/R < 0 구역의 프로펠러 후류의 유속과 압력 때문에 유동장이 전체적으로 자유수면 방향으로 상승하게 되며 이는 Paik, et al. (2005)의 연구에서도 확인할 수 있다. 따라서 허브에서 유기된 와동은 방향타의 영향이 없다면 전체적으로 좌현 상단을 향할 것이다.
본 연구는 모형선 스케일에서 수행된 만큼 실제 선박의 프로펠러 후류와는 레이놀즈 수의 차이로 인한 유동장의 차이가 있다. 실제 선박에서는 경계층의 두께 비가 더 작아지므로 프로펠러는 더 낮은 반류비에서 작동하게 되며, 프로펠러 후류 또한 모형선 결과보다 더 가속된다. 하지만 스케일에 무관하게 +z 방향의 유동은 항상 존재하므로 후류 유동장에서 좌우현의 차이는 유사하게 나타날 것이다.
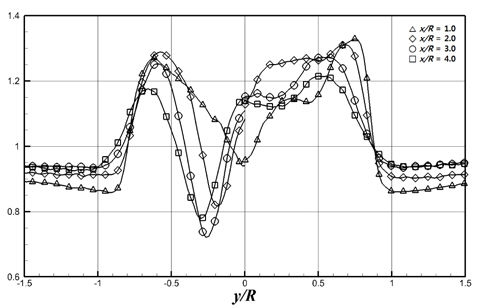
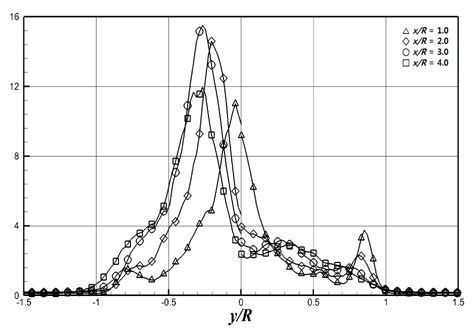
Fig. 5는 계측면에서 특정 x/R 위치에 대한 u/U 값의 변화 추이이다. 앞서 전체 속도 분포 양상에서 확인한 바와 같이 좌우현의 속도 분포의 차이가 확인되었으며 프로펠러 후류 영역이 수축 되는 경향과 함께 전체적으로 좌현으로 이동하는 것을 알 수 있다. x/R = 1.0 지점에서 프로펠러 날개 끝 지점에서 가장 높은 u/U 값을 보이지만 유동이 진행함에 따라 운동량이 확산되어 국부 최대값이 작아지는 경향이 좌우현 모두에서 나타났다.
그리고 프로펠러의 영향을 받지 않는 y/R = ±1.0 경계의 바깥에서는 전체적으로 손실된 x 방향 속도가 유동이 진행함에 따라 회복되는 경향이 나타났다. 이런 반류의 회복 양상은 프로펠러가 없는 모형선의 반류에서도 나타나지만 (Kim, et al., 2001) 본 연구에서는 프로펠러 후류 유동장의 운동량 확산에 의해 프로펠러 후류 영역 외부의 유동에서 속도 성분이 더 많이 회복되는 것으로 보인다. 다만 허브 와동에서는 운동량의 확산에 의한 영향이 두드러지게 관측되지는 않았다.
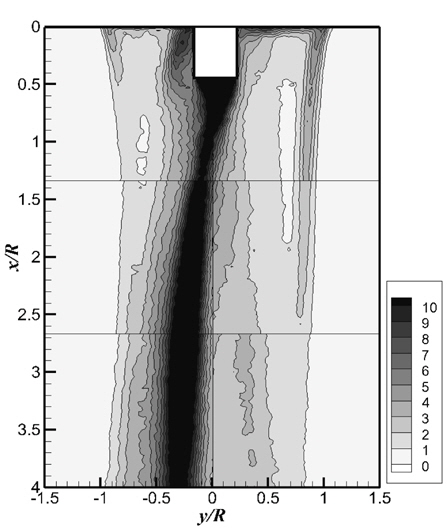
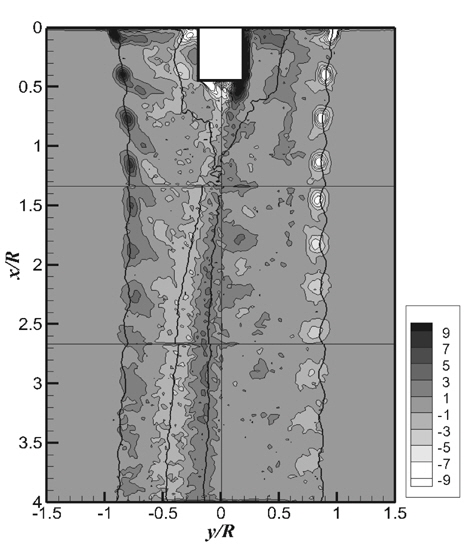
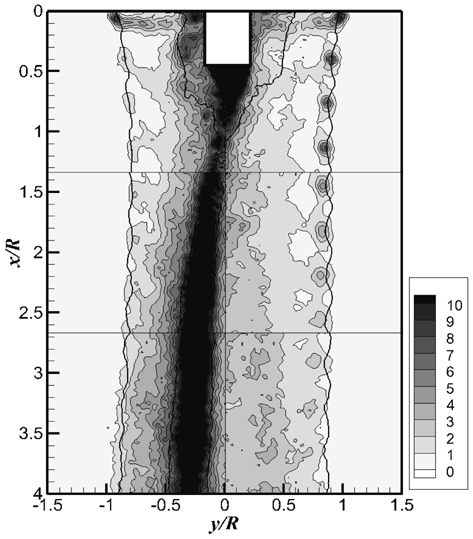
Fig. 6은 시간 평균 속도장에서 얻어진 요동 성분으로 구한 TKE의 분포이다. 전체적으로 앞서 u/U 분포와 같이 프로펠러의 영향을 받은 구역이 그렇지 않은 구역과 잘 대비되어 나타났다. 프로펠러 날개 끝에서 유기된 와동의 진행 경로를 따라 높은 TKE가 관측되기도 하였지만 오히려 프로펠러 허브에서 유기된 유동을 따라서 더 큰 TKE값이 분포되는 것이 확인되었다. 일반적으로 TKE는 속도의 구배가 큰 지역에서 큰 값을 보인다는 것을 감안하면 허브 와동 구역의 속도 구배가 더 큰 값을 보이기 때문에 더 큰 난류 성분을 갖는 것으로 보인다.
날개 끝 와동의 경로를 따라 나타난 TKE는 우현에서 더 큰 값을 보였다. 이는 앞서 설명한 대로 프로펠러에 걸리는 하중의 크기 차이로 인한 것인데 더 큰 TKE 값을 가지는 우현에서는 x/R = 2.5 까지 식별이 가능하였지만 좌현에서는 x/R = 0.5 이후 에서는 식별이 불가능하였다. 그리고 허브에서 유기된 와동의 TKE 분포는 유동이 진행됨에 따라 소산되는 경향을 본 연구에서 선택된 계측면 내에서는 확인할 수 없었다. 허브에서 유기되는 와동에서 가장 큰 난류 성분이 계측된 만큼 실제 프로펠러의 설계에 있어서는 프로펠러 허브의 합리적인 설계를 통해 허브에서 유기되는 와동과 난류 성분을 제어할 필요가 있다
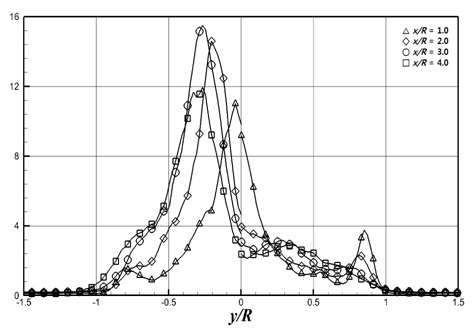
Fig. 7은 계측면의 특정 x/R 위치에 대한 TKE의 변화 양상이다. 프로펠러 바깥 부분에서는 비록 모형선의 반류 영역이기는 하지만 난류 성분이 거의 계측되지 않는데 반해 프로펠러 후류 영역에서는 높은 TKE 값을 가지는 것이 확인되어 프로펠러의 영향을 받은 구역과 그렇지 않은 구역의 차이가 뚜렷이 나타났다. 그리고 x/R = 1.0 지역에서는 좌우현의 날개 끝 와동 위치의 TKE가 잘 나타났지만 우현 날개 끝에서 유기된 TKE 성분은 유동이 진행됨에 따라 지배적인 크기를 갖는 허브 와동의 영향에 가려 식별되지 않았다.
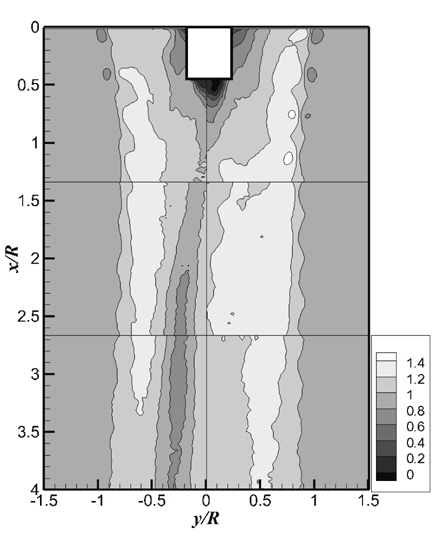
프로펠러 위상이 0˚일 때의 속도장을 얻어 x 방향 성분을 Fig. 8에 나타내었다. 앞서 전체 평균 결과와 비교하였을 때 x/R = 1.5 미만의 구역에서는 u/U = 1.0 영역의 경계를 따라 국부 최솟값과 최댓값의 대비가 잘 나타난 것을 확인할 수 있으며 이는 주기적으로 발생하는 프로펠러 날개 끝 와동으로 인한 것이다. 그리고 허브에서 유기되는 저속 구간은 속도 성분의 분포 면에서 앞의 시간 평균 결과와 큰 차이가 없는 것으로 보인다.
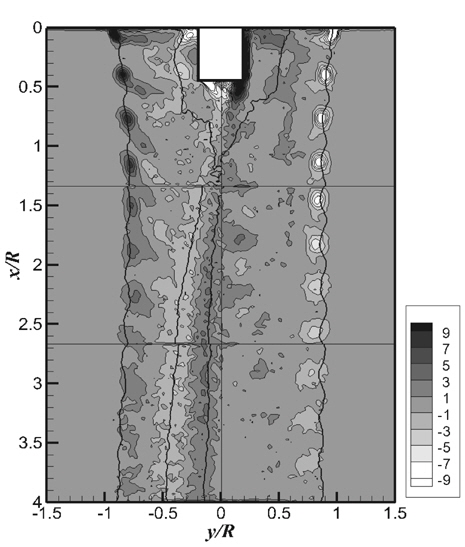
Fig. 9에 위상별 평균 속도장에서 구한 와도 분포와 위상별 평균에서 구한 u/U = 1.0 경계를 함께 나타내었다. 프로펠러 날개 끝과 허브에서 유기된 와동이 주기적인 배열을 이루는 것을 확인 할 수 있다. 날개 끝 와동은 프로펠러 후류가 진행함에 따라 u/U = 1.0 경계보다 안쪽에 위치하는 경향이 나타났다. 이는 유동이 진행함에 따라 앞서 설명한 프로펠러 후류 유동장의 운동량 확산 으로 인해 전체적으로 유속이 증가하기 때문이다.
와동의 크기를 보면 앞서 시간 평균 결과에서도 확인되었듯 더욱 큰 부하가 걸리는 우현에서 유기된 날개 끝 와동이 절대값 기준으로 평균 50% 정도 더 큰 와도를 나타내었으며, 날개 끝 와동은 x/R = 3.5지점을 지나면서 관측이 불가능해질 정도로 소산되었는데 이는 좌우현 모두 동일한 경향을 보였다. 그리고 프로펠러 허브에서 유기된 와동과 날개 끝 와동의 진행 속도 차이로 인해 와동 분포 구조가 유동의 진행과 함께 점차 변형되는 것을 확인할 수 있다. 허브 와동은 발생 초기에는 규칙적인 분포를 보이지만 유동의 진행에 따라 높은 난류 성분의 영향으로 와동의 위치가 일정치 않게 되어 와도가 띠 모양으로 분포하게 된다.
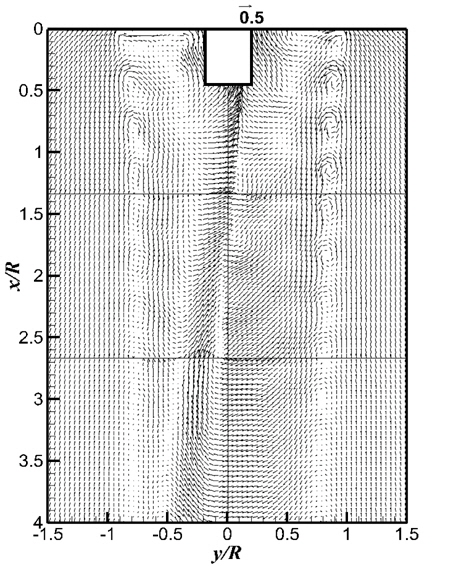
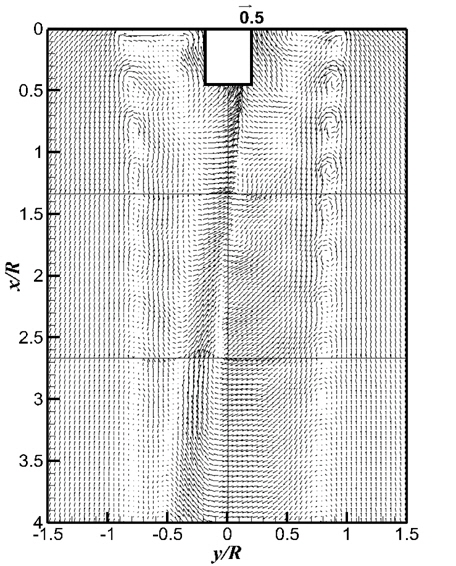
Fig. 10은 날개 끝 와동의 전달 속도 (UC = 1.08)를 이용하여 Galilean decomposition을 적용한 결과이다. 앞서 와동 결과와 같이 좌현에서 날개 끝 와동이 더욱 잘 확인되었다. 하지만 허브 와동은 날개 끝 와동과 전달 속도가 달라 Galilean decomposition을 적용하여도 와동이 잘 식별되지는 않았다. 그리고 x/R > 2.0 구역의 허브 와동의 경로 우현에서 강한 −y 방향 유속 성분이 확인되 었는데 이는 허브 와동이 좌현으로 굽는 현상의 원인으로 보인다.
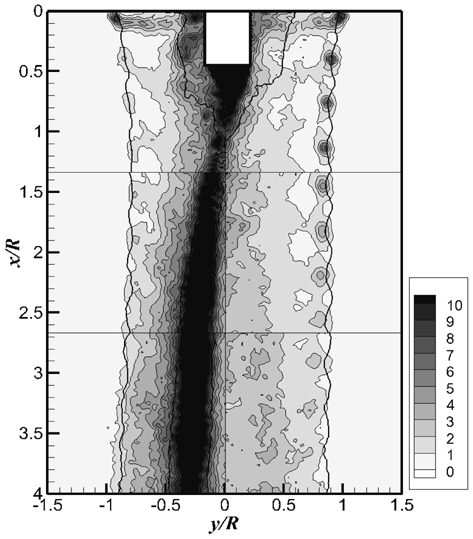
Fig. 11은 위상 평균 속도장의 TKE 분포이다. 앞서 시간 평균과 마찬가지로 허브로부터 이어진 저속 구간에서 높은 TKE가 관측되었으며 우현에서 유기된 프로펠러 날개 끝 와동의 중심에서 높은 TKE가 얻어졌다. 날개 끝 와동에서 확인되는 TKE는 좌현의 경우 x/R = 2.5, 우현의 경우 x/R = 3.5까지 식별이 가능한데 우현에서는 난류의 소산으로 인해 TKE 국부 최대값이 줄어드는데 반해 좌현에서는 허브 와동의 영역에 날개 끝 와동이 포함되면서 식별이 불가능해졌다.
본 연구에서는 선체를 따라 형성된 3차원의 선미 유동장 안에서 작동하는 프로펠러 후류의 특성을 파악하기 위하여 자항 상태의 모형선에 대해 프로펠러의 후류 영역을 예인수조용 2차원 PIV를 이용해 계측하였다. 그리고 시간에 대한 평균과 위상 평균의 결과를 속도와 난류 성분에 대해 해석하여 다음과 같은 결과를 얻었다.
전체 프로펠러 후류의 x 방향 속도 성분 분포를 통해 선미 유동장의 영향으로 프로펠러 날개의 받음각 차이가 발생하고 좌우현의 프로펠러 후류 발생 양상이 차이를 보임을 확인하였다. 이는 위상 평균의 와도와 TKE 비교를 통해서도 동일한 결론을 얻을 수 있었다. 그리고 허브 와동은 프로펠러 후류의 압력 차이로 인해 전체적으로 좌현을 향하는 경향이 나타났으며 위상 평균 속도장에 Galilean decomposition을 적용하여 국부적인 유동 구조의 발생을 확인하였다. 마지막으로 와동의 영향을 받는 지역에 난류 운동에너지가 집중되는 것을 확인하였으며 이는 특히 허브 와동에서 큰 값을 보여 프로펠러 후류가 진행할수록 허브 와동에서 비롯된 TKE가 지배적인 크기를 가지는 것을 확인하였다.
본 연구에서 확인된 프로펠러 후류의 특성을 이용하여 Propeller Boss Cap Fin (PBCF)나 방향타 핀과 같이 프로펠러 후류 안에서 작동하는 연료 저감장치의 설계나 선미 유동장 개선에 공학적으로 적용할 수 있을 것으로 기대된다. 추가로 본 연구에 사용된 유동장계측 기법을 이용하여 방향타를 장착한 경우에 대해 동일한 유동장 계측 실험을 수행하고 그 결과를 비교하여 프로펠러 후류에 방향타가 미치는 영향을 해석할 수 있을 것으로 기대된다.