The objective of this study was to monitor and evaluate the schooling characteristics, including the distribution density (volume backscattering strength) and acoustic size (target strength), of commercially valuable species swimming in response to artificial reefs installed at Suyeong Man, Busan, Korea. Fish aggregations at two artificial reef areas and at a nearby natural rocky reef habitat were recorded and analyzed using a 70 kHz split-beam echo sounder and 330 kHz side-scan sonar from August to September, 2006. An underwater CCTV camera system was also used to observe marine organisms in physical contact with and swimming very close to artificial reefs. During the acoustic observations at three reef sites, useful information about schooling characteristics of fish aggregations responding to artificial reefs were obtained, but more trials are needed to confirm significant differences in schooling behavior and geographical distributions in areas containing natural reef structures and artificial reefs.
현재 우리나라의 각 지방자치단체에서는 연안 어장에 대한 어업생물 자원을 효과적으로 보호, 관리할 목적으로, 또한, 어업 생산성을 지속적인 유지하기 위한 방안으로 바다 목장화 사업을 활발하게 추진하고 있다. 이 때문에 자율어업의 저변확대를 위한 인공어초 어장의 조성에 매우 많은 비용과 노력이 투입되고 있는 실정이다(NFRDI, 2006; NFRDI, 2007). 그러나, 이와 같은 정부 당국의 노력에도 불구하고, 최근까지 우리나라 주변 해역에 시설된 수많은 인공어초 어장에 대한 사후관리 시스템의 미비로 인해 어느 해역에 어느 정도의 인공어초가 어떻게 시설되어 어떤 상태로 유지되고 있는가에 대한 정량적인 조사가 효과적으로 이루어지지 않아 이들 어초 해역에 대한 자원조성효과의 실효성에 많은 의문이 제기되어 왔다. 이와 같은 인공어초 사업이 사회문제로 부각됨에 따라 현재 각 지방자치단체에서는 향후 시설이 예정된 해역에 대한 타당성 조사를 강화하는 한편, 지금까지 시설된 인공어초 해역에 대한 자원조성 효과의 평가에 많은 관심을 갖게 되었다. 또한, 최근에는 이들 어초가 시설된 해역에 투기 및 유실된 어구에 기인하는 어장의 황폐화가 또 다른 사회문제로 대두됨에 따라 어초 어장의 사후관리 시스템의 구축에 대해서도 많은 예산을 투입하고 있다. 특히, 부산광역시에서는 1987년부터 2005년까지 총 37회에 걸쳐 해운대구, 남구 및 사하구 등의 15개의 연안 해역에 총 13,151개의 사각형, 반구형 및 2단 상자형 강제어초, 연약지반용 강제어초, 패조류용 세라믹 어초 등을 투입하여 총 2,313 ha의 인공어초어장을 조성하였다.
본 연구는 부산광역시에서 조성한 이들 인공어초 어장 중에서 주로 남구해역에 시설된 어초를 대상으로 side scan sonar, split beam echo sounder 및 수중 CCTV 카메라 시스템 등을 사용하여 어초의 시설상태, 어초 주변에 대한 어업생물의 공간 분포특성, 어초의 부착생물 등을 조사하고, 또한, 동일해역에서 어민들이 저층 자망, 외줄 낚시, 통발, 쥐치 들망, 주낙 등에 의해 어획한 어획물로부터 어초 주변의 서식하는 어업생물의 어종조성 등을 분석, 고찰하였다.
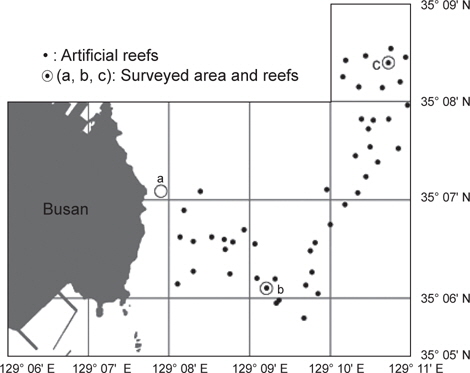
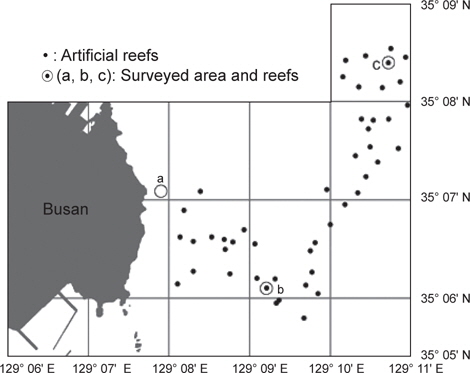
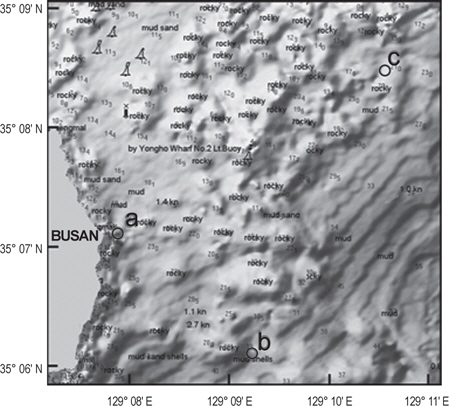
본 조사해역은 부산광역시가 1989년부터 1998년까지 남구 및 해운대구 수심 18.0 m부터 42.3 m의 연안해역에 콘크리트 사각형 어초를 시설한 연안 어장으로서, 시설 당시 어초가 투하된 지점의 배치도는 Fig. 1과 같다. 이 해역에 시설된 모든 사각 어초의 크기는 L2 m×W2 m×H2 m, 중량은 3.384 톤, 공간용적은 1.41 m3이다.
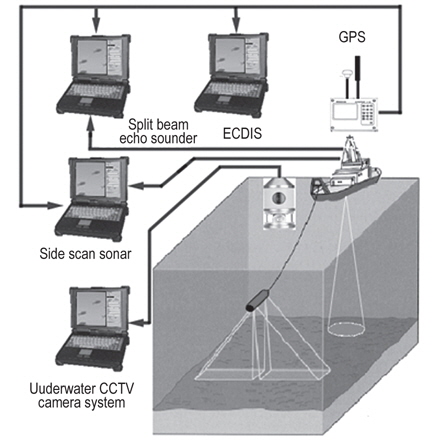
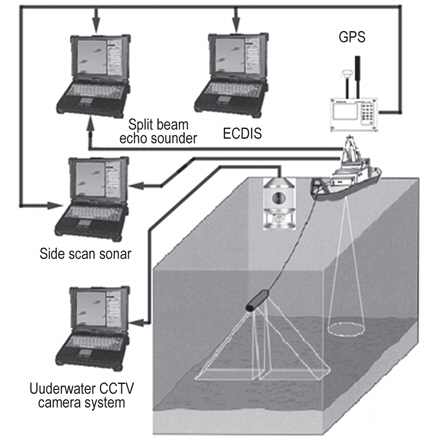
Fig. 1에서 사각 어초는 집중 산적, 집중 평면, 분산 시설의 3형태로서 해중에 투하되었는데, 한 개의 시설당 투하된 어초의 수는 39개에서 155개의 범위였다(NFRDI, 2006; NFRDI, 2007). 현장조사는 2006년 8월 24일과 2006년 9월 29일의 2회에 걸쳐 Fig. 1에서와 같이 어초가 시설된 주변해역에 조사정점 a (35° 07.103′N, 129° 07.899′E), b (35° 06.097′N, 129° 09.247′E), c (35° 08.458′N, 129° 10.676′E)를 미리 설정하고, 이들 수역을 중심으로 선박을 이동시키면서 실시하였다. 현장에서는 Fig. 2에서와 같이 side scan sonar, split beam echo sounder 및 CCTV로부터의 각종 정보를 note book PC에 실시간으로 동시에 수록하고, ECDIS (Electronic Chart Display and Information System)를 이용하여 DGPS로부터의 위치정보, 전자해도의 수심정보 등을 바탕으로 작성된 3차원 해저 지형정보 등을 상호 연관시켜 어군의 유영행동, 어초의 부설 위치 및 어초 주변에 대한 어군의 분포특성을 등을 분석, 고찰하였다.
>
Side scan sonar에 의한 어초 시설 조사
본 연구에서 사용한 side scan sonar (sportscan, imagenex, USA)의 작동 주파수는 330 kHz이고, towing body의 양측에 부착되어 있는 송ㆍ수파기의 -3 dB점에 대한 수평 및 수직 지향각은 각각 1.8°, 60°이었다. 이들 좌현 및 우현측의 side scan 송ㆍ수파기의 수면에 대한 경사각은 약 20°이다. 본 실험에서 towing body의 양측 송ㆍ수파기에 의해 수신되는 좌현 및 우현 측의 echogram은 각각 250개의 echo data로서 구성하였고, 조사는 탐지거리를 90 m로 설정하여 수행하였다. Side scan sonar에서 발사되는 송신펄스 폭은 100 μs이었고, towing body의 예항수심 및 예항속력은 각각 약 5 m와 약 2 knot이었다. 현장에서는 대형트럭 차량용 battery (DF120R) 1개로부터 출력되는 DC 12 V의 전원을 이용하여 side scan sonar 시스템을 구동하였다. 실험은 note book PC에 설치된 WIN881SS window program (Imagenex, USA)을 이용하여 RS-232C serial interface를 통해 115.2 kbps로서 side scan sonar head를 제어하면서 초음파의 송신 및 수신, 파라미터 설정, echogram 표시, data 수록 및 재생 등을 행하였다. 조사선의 위치정보는 DGPS수신기에서 출력되는 $GPGLL, $GPGGA의 NMEA0183 sentence를 side scan의 RS-232C port에 입력하여 echogram과 함께 동시에 수록하였다. 조사해역에 부설된 어초 및 탐지 어군의 지리적인 분포는 DGPS의 위치정보를 토대로 분석하였는데, 이를 위해 DGPS 수신기의 출력 정보를 ECDIS에 입력하였다. 또한, S57 ENC 해도의 수심 데이터를 이용하여 작성한 3차원 해저지형에 sonar위치정보를 중첩시켜 표시함으로써 조사선의 항주에 따른 해저지형의 변화와 sonar에 의한 어초의 분포영상, 어초 주변의 어군의 분포패턴 등을 상호 연관시켜 파악할 수 있도록 하였다(BOBP, 1994: Trevorrow, 2001).
>
Split beam echo sounder에 의한 어군분포 및 TS 측정
본 실험에서 어초 주변에 서식, 분포하는 어군의 분포 및 현장 TS (target strength) 측정은 Fig. 2에서와 같이 ES60 split beam echo sounder의 송ㆍ수파기를 조사선 (해운호, 6톤)의 좌현측 약 1 m의 수심에 고정한 후, 조사선의 속력을 약 2 knot로 유지하면서 수행하였고, 동시에 echogram은 hard disk에 수록하였다. 본 실험에 사용한 70 kHz split beam 송ㆍ수파기(ES70-11, Simrad, Norway)의 −3 dB에 대한 빔 폭은 11°이고, 펄스 폭은 0.25 ㎳이다. 시스템의 교정은 직경 32.1 mm의 표준구(copper sphere, TS = −39.1 dB)를 이용하여 행하였다.
현장에서는 대형트럭 차량용 battery (DF120R) 2개를 병렬로 연결하여 얻은 DC 12 V의 전압을 DC/AC 변환기에 입력하여 AC 220 V의 전압을 발생시켜 어군탐지 시스템을 구동하였다. 실험은 note book PC에 설치된 ES60 window program을 이용하여 GPT 시스템을 제어하면서 초음파의 송신 및 수신, 파라미터 설정, echogram 표시, data 수록 및 재생 등을 행하였고, 위치정보는 DGPS수신기에서 출력되는 $GPGLL, $GPGGA의 NMEA0183 sentence로부터 얻어 echogram과 함께 표시하였다. 현장에서 수록한 echogram은 후일 실험실에서 TS 해석 software인 EP500 (Simrad, Norway)을 이용하여 TS를 산출하였고, 이들 TS빈도분포로부터 평균반사강도를 산출하여 어초주변에 서식, 분포하는 어업생물의 TS분포특성을 조사, 분석하였다. 또한, 인공어초 주변수역에 있어서의 어군의 분포특성 및 분포밀도를 조사하기 위해 ES60 split beam echo sounder로부터 출력되는 echo 신호를 연속적으로 수록한 후, 후일 실험실에서 echoview software (ver.3.3, Sonardata, Australia)를 이용하여 후방체적산란강도(volume backscattering strength, 이하 SV라 함.)를 산출하였다.
본 실험에 사용한 수중 CCTV 시스템(CA-18, JMC, Japan)은 시야각이 60°, 분해능이 25만 pixel인 카메라 1개와 20 W의 할로겐 램프 1개가 장착된 것으로서, 0.9 lux 이하의 조도에서 수중물체의 촬영이 가능한 시스템이다. 현장에서는 카메라로부터 출력되는 NTSC 방식의 video 신호를 DVR 시스템 (MIG4CH, Kjtech, Korea)을 이용하여 초당 30 프레임의 속도로써 모니터링하면서 PC hard disk에 수록한 후, 후일 실험실에서 정밀 분석을 행하였다.
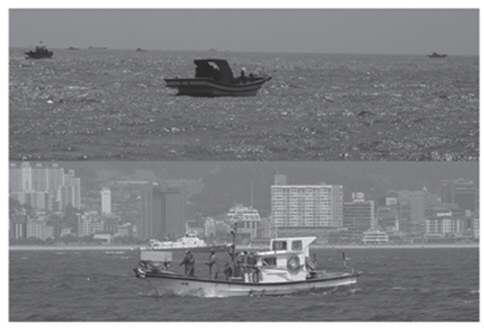
본 연구의 조사해역에 시설된 어초 주변에 서식, 분포하는 어업생물의 어종조성은 용호와 민락 어촌계 어민들이 해당 어초 주변에서 어획한 어업생물을 해당 어선에 직접 승선하여 조사하였다. 조사당시 해당 어초 해역에서 조업중인 어선의 분포는 Fig. 3과 같고, 이들 어선에서 사용한 어구는 저층 삼중자망, 통발, 쥐치 들망, 주낙, 외줄낚시 등이었다.
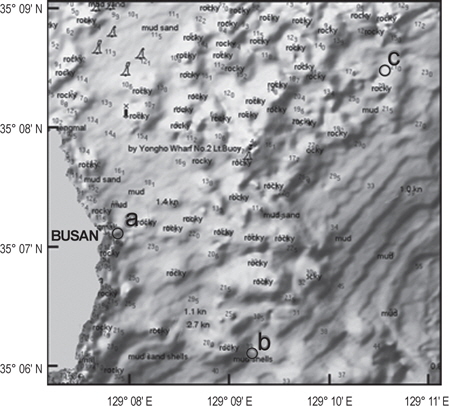
본 연구가 수행된 부산 수영만의 인공어초 시설해역에 대한 3차원 해저 지형도를 전자해도 정보를 토대로 작성한 결과는 Fig. 4와 같고, 여기에는 조사정점 위치도 함께 나타내었다. Fig. 4에서 3차원 해저 지형도는 3D seabed map model (Kim et al, 2006)을 이용하여 생성 및 작성하였다. 즉, 먼저 어초 시설해역에 대한 해도상의 영역을 일정한 격자(grid) 구조로 분할하여 각격자에 대한 노드(node)를 추출하고, 전자해도(ENC)로부터 얻은 수심 데이터를 각 격자 및 노드에 할당한 후, 최소자승법을 이용하여 이들 격자, 노드, 수심 데이터에 대한 해면의 표면함수를 산출하였다. 이와 같이 구해진 표면함수를 이용하여 각 노드에 대한 수심을 계산하고, 이 계산된 수심과 ENC 상의 수심을 서로 비교하여 그 차이가 일정한 값 이하가 될 때, 그 표면함수를 이용하여 3차원 해저지형을 생성하였다.
Fig. 4에서 알 수 있는 바와 같이 수영만에 있어서는 수심 약 25 m 등심선을 경계로 그 내측의 연안 수역에서는 주로 암반 등으로 구성된 자연초가 매우 불규칙하게 분포하는 지형적 특성을 나타내고 있으나, 그 등심선 외측에 있어서는 수심 급격이 깊어지면서 저질의 패턴이 mud, mud shells 및 mud sand shells등으로 바뀌어 가는 지형특성을 나타내었다. 즉, Fig. 1과 Fig. 4에서 해운대구 및 남구에 투하된 대부분의 인공어초의 시설은 주로 수심 약 25 m 등심선을 경계로 배치되어 있음을 알 수 있었다. 또한, 본 연구에서 조사수역으로 설정한 정점 a, b는 남구의 인공어초 시설해역에, 정점 c는 해운대구 인공어초 시설해역에 각각 위치하고 있다. 지금까지의 예비적인 음향조사 결과, 정점 a 수역에서는 용호동 이기대 연안을 따라 수영만 내만으로 회유 이동하는 농밀한 어군이 빈번하게 탐지되어 이들 어군의 내유패턴 및 군집특성을 실시간으로 모니터링 하였다. 정점 b는 1966년도에 사각형 인공어초 120개를 수심 약 35 m 전후의 mud shells 해저에 집중적으로 평면 배치한 수역으로써 지금까지 남구 해역에 시설된 인공어초 시설 중에서 그 규모가 가장 크고, 어선들이 이 수역 인근에 많이 분포하는 경향이 있어 이 어초 어장에 대한 어군의 군집특성을 모니터링 하였다. 한편, 정점 c는 수심은 약 22 m 전후의 해저에 암반이 비교적 평탄하게 산재하고 있는 수역으로서, 바로 인근에 인공어초가 광범위하게 분포하고 있어 농밀한 어군이 빈번하게 탐지되었다.
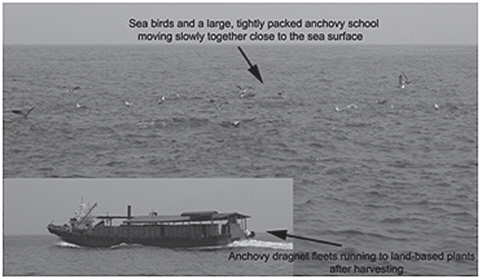
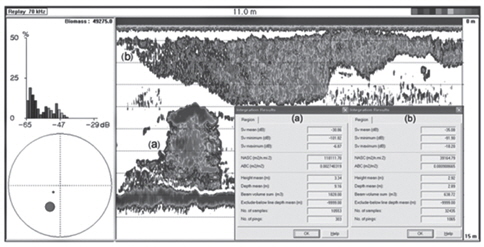
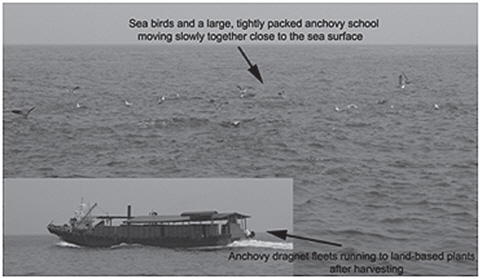
2006년 9월 29일에 Fig. 1과 Fig. 4의 조사정점 a (35° 07.092′N, 129° 07.853′E)에서 연안을 따라 이동하는 대형의 멸치어군을 선상에서 직접 관찰 하였는데, 이들 멸치 어군에 대한 사진영상과 ES 60 split beam echo sounder의 기록영상은 각각 Fig. 5 및 Fig. 6과 같다. 이들 멸치어군이 탐지된 조사정점 a는 연안에 매우 근접한 수심 약 11 m, 해저의 저질이 매우 불규칙한 암반 지역으로서 이 정점으로부터 약 850 m SE 방향에는 1998년도에 투입한 2개의 어초 시설이 있는 수역이다. 본 조사에서는 이 수역에서 조사선의 속력을 약 2 knot로 유지하면서 연안을 따라 이동하는 대형의 멸치 어군을 탐지, 추적하였다. 이 멸치어군을 추적할 당시, 해조의 무리가 해면상으로 튀어 오르는 멸치를 해면에서 포획하는 광경이 시각적으로 관찰되었고, 주변 수역에서는 Fig. 5에서와 같이 기선 권현망 어선 및 멸치가공선이 수영만 연안 가까이 진입하여 작업을 하고 있었다. 또한, 수중 CCTV를 수중의 4 m 수심에 내려 이들 멸치 어군의 관찰을 시도하였으나 멸치 어군이 수중 카메라의 관찰 가능범위 밖에 존재하여 영상은 수록할 수 없었다.
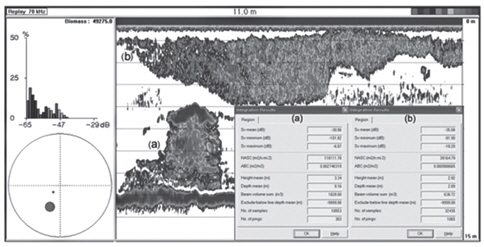
한편 Fig. 6에서 대형의 멸치 어군이 표층에서 수심 약 6 m에 이르는 범위에 두꺼운 층을 형성하여 분포하고 있고, 해저 부근에 있어서도 농밀한 어군이 형성되어 있음을 알 수 있다. 이들 어군을 구성하는 각 개체어에 대한 TS의 빈도분포를 echogram의 좌측에 함께 나타내었다. Fig. 6의 좌측 TS의 빈도분포도에서 −65.0 ~ −49.8 dB 범위의 TS 모드는 멸치에 기인하는 반사강도 성분이고, −49.8 ~ −42.9 dB 범위의 TS 모드는 어민들이 주변해역에 설치한 삼중자망에 어획된 어획믈 조성으로부터 멸치를 섭이하기 위해 군집한 주로 전갱이 어군에 의한 반사강도 성분으로 판단된다.
이 때, 멸치의 TS로서 추정되는 빈도분포모드를 분리하고, 이 빈도분포도로부터 평균 TS를 추정한 결과, 그 값은 −56.75 dB이었다. 따라서, 이 값을 토대로 멸치의 TS와 체장(L)과의 실험적인 관계식(Iversen et al., 1993), 즉,
으로부터 추정한 멸치의 평균 체장은 6.13 cm이었다.
한편, Fig. 6에는 Echoview software를 이용하여 ES 60 split beam echo sounder에 의해 탐지한 표ㆍ중층부의 멸치어군에 대한 echogram과 저층부의 전갱이 어군 등에 대한 echogram을 각각 구분하여 이들 두 어군에 대한 SV 추정결과를 함께 나타내었다. Fig. 6에서 탐지된 멸치어군의 SV 값(dB)을 산출한 결과, 그 평균 SV 값은 −35.08 dB이었다. 따라서, 이 평균 SV 값과 앞서 추정한 멸치의 평균 TS 값과의 관계로부터 단위체적공간에 분포하는 멸치의 어군밀도를 추정한 결과, 멸치의 분포밀도 추정치는 146.9 마리/m3이었다. 한편, 표ㆍ중층부에 군집한 멸치를 섭이하기 위해 군집한 전갱이 어군 등에 대한 평균 SV 값은 −30.86 dB이었다.
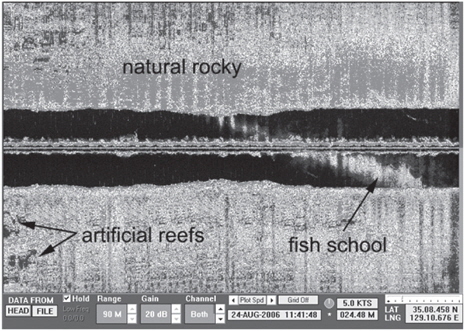
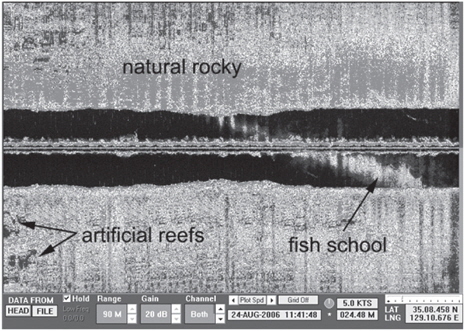
Fig. 7과 Fig. 8은 2006년 8월 24일에 조사선이 부산 해운대구 청사포 해역의 자연적인 암초(natural rocky)가 흩어져 분포하는 해역과 인공어초가 시설된 해역 사이를 반복하여 왕복, 항주하면서 조사정점 c, 즉, 35° 08.458′N, 129° 10.676′E 부근 수역에서 동시에 탐지한 side scan sonar 영상과 ES 60 split beam echo sounder에 의한 어군 echogram을 각각 나타낸 것이다.
Fig. 7 및 Fig. 8의 조사수역 부근의 수심은 22-25 m 범위에서 변화하였고, 해저의 저질은 암반이 비교적 평탄하게 산재하여 있는 수역으로서, 이 정점 부근에서는 조사선의 속력을 약 5 knot로 유지하면서 음향조사를 수행하였다. Fig. 7의 side scan sonar 영상 중앙부의 상하 두 발진선 중에서 상부와 하부는 각각 좌현측과 우현측 송ㆍ수파기에 대한 발진선이다. Fig. 7에서 side scan sonar 영상의 좌측 하단부, 즉, 선박의 항주 방향에서 볼 때, 우현측에 Fig. 1과 Fig. 4에 나타낸 조사정점 c에 시설된 인공어초 영상이 나타나고 있음을 알 수 있다. 또한, side scan sonar 영상의 좌측 상단부, 즉, 선박의 항주 방향에서 볼 때, 좌현측에는 연속적으로 광범위하게 분포하는 자연초에 대한 영상이 매우 선명하게 나타나고 있음을 알 수 있다.
특히, 이 side scan sonar의 영상에는 조사선이 항주하고 있는 방향의 좌ㆍ우현측으로 길게 연결된 띠 모양의 영상이 선명하게 나타나고 있는 데, 이것은 Fig. 8에서 알 수 있는 바와 같이 표층에서부터 저층에 이르기까지 마치 계단상으로 매우 길고, 연속적으로 분포하는 어군에 대한 영상이다. 조사 당시, 이 수역에서는 어민들이 들망 및 저층 유자망 등을 사용하여 전어를 어획하고 있었던 점으로부터 이 어군 영상의 구성생물은 전어라고 판단된다. Fig. 8의 ES 60 split beam echo sounder의 echogram에는 이들 전어 어군을 구성하는 각 개체어에 대한 반사강도의 빈도분포를 함께 나타내었다. Fig. 8에서 현장에서 추정한 전어의 TS는 −59.8 - −41.8 dB 범위였고, 그 평균 TS는 −46.1 dB이었다. 이 값을 전어에 대한 반사강도 TS와 체장 (L)과의 실험적 관계식(Lee, 2010), 즉,
으로부터 추정한 평균 가랑이 체장은 12.2 cm이었다. 여기서 λ는 사용 주파수의 파장이다.
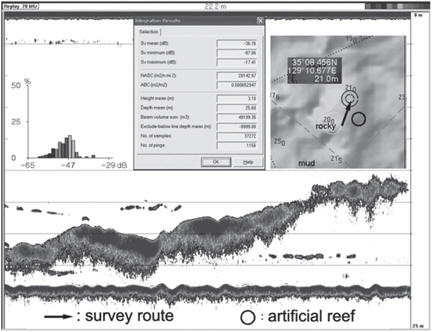
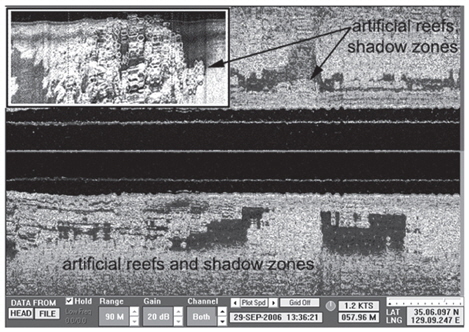
한편, Echoview software를 이용하여 Fig. 8에서 탐지된 전어 어군의 SV (dB)를 산출한 결과, 평균 SV는 −36.76 dB이었다. 따라서, 이 평균 SV 값과 전어의 평균 TS와의 관계로부터 단위체적공간에 분포하는 전어의 어군밀도를 추정한 결과, 전어의 분포밀도 추정치는 8.59 마리/m3이었다. Fig. 9는 2006년 9월 29일에 조사정점 35° 06.097′N, 129° 09.247′E 부근 수역을 약 1.2 knot로 항주하면서 side scan sonar를 사용하여 수록한 인공어초 시설에 대한 해저 기록영상이다. 이 인공어초 시설은 부산시가 1996년도에 중심좌표 35° 06.100′N, 129° 09.231′E 위치의 11,621 m2 해역의 범위에 L2.0 m×W2.0 m×H2.0 m의 사각형 인공어초 120개를 수심 약 35 m 전후의 해역에 집중적으로 투하하여 조성한 시설높이가 약 3 m 정도 되는 인공어초 시설이다. 이 인공어초 시설해역은 저질이 mud shells인 해저 상에 조성된 관계로 side scan sonar의 영상기록으로 볼 때, 어초 시설의 일부가 침하된 흔적이 관찰되고 있다.
Fig. 9에서는 화면 영상 위쪽 해저에 배치되어 있는 인공어초 시설의 입체적인 형상패턴을 보다 상세하게 분석하기 위해 정밀 side scan sonar (S-150, (주) 씨스캔, 한국)을 사용하여 400 kHz의 주파수에서 수록한 해저 기록영상도 함께 나타내었는데, 이 시스템에서 사용한 송ㆍ수파기의 −3 dB 점에 대한 수평 및 수직 지향각은 각각 0.5°, 50°이었다. 특히, Fig. 9의 인공어초 시설은 수영만에 투하된 다른 인공어초 시설과 달리 특정 수역의 제한된 영역에 인공어초를 집중적으로 투하하여 산적형 패턴으로 조성한 관계로 어초 구조물의 높이가 매우 높은 특징을 갖고 있는데, 이 때문에 side scan sonar에서 발사되는 초음파 펄스신호가 도달하지 않는 맹목구역(shadow zone)이 선명하게 묘사되고 있음을 알 수 있었다. 현재, 이들 인공어초 구조물에 의해 초래되는 맹목구역의 형상학적 특성의 분석 및 평가에 대해서는 연구가 진행 중에 있다.
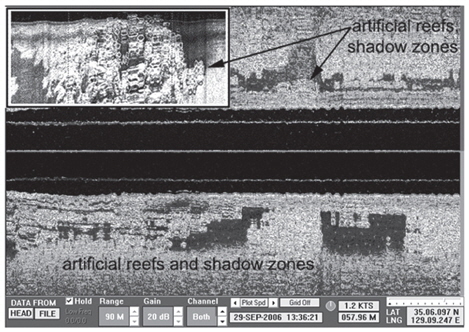
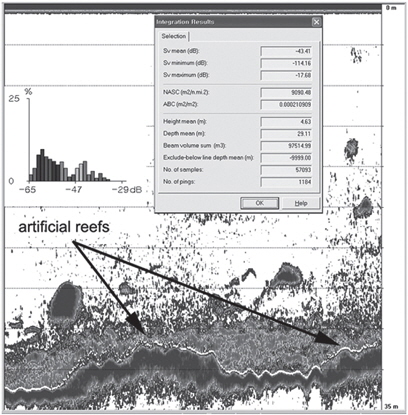
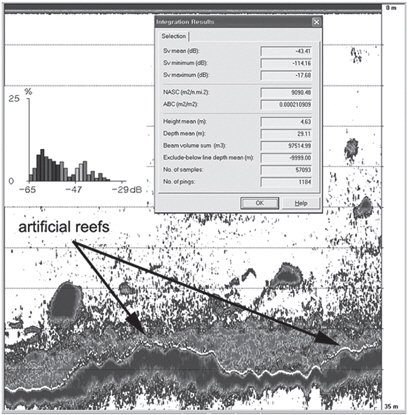
한편, Fig. 10은 Fig. 9의 side scan sonar에 의한 어초 분포조사와 동시에 ES 60 split beam echo sounder를 사용하여 어초 주변수역에 분포하는 어군영상을 수록한 echogram이다. Fig. 11의 echogram은 조사선이 인공어초가 시설된 조사정점 b의 바로 위의 해면상을 항주하면서 수록한 것인데, 이 어초의 시설 규모는 L106 m×W179 m로서 남구 해역에 시설된 인공어초 중에서 가장 넓은 공간에 배치된 것이다.
이들 인공어초가 시설된 조사정점 b는 Fig. 4의 3D 해저 map에서 알 수 있는 바와 같이 자연초가 NNW 방향의 수심 29 m, 거리 약 300 m의 인근에 존재하고 있는 관계로 이 자연적인 암반 구조물과 인공어초 시설이 하나의 조합된 서식처로서 그 기능을 발휘하고 있는 것으로 판단된다. 이 때문에 Fig. 10에서 알수 있는 바와 같이 인공어초 시설 주변에는 매우 농밀한 어업생물이 군집하고 있다. Fig. 10의 echogram에 함께 나타낸 TS의 빈도분포 패턴으로부터 −65.0 - −49.0 dB 범위에 집중되는 하나의 낮은 TS모드와 −49.0 - −32.5 dB 범위에 집중되는 또 하나의 높은 TS 모드가 각각 분리되어 존재하고 있는 데, 낮은 TS 모드에 대한 평균 TS 값은 −56.0 dB이었고, 높은 TS 모드에 대한 평균 TS 값은 −40.8 dB이었다. 또한, 이들 어군이 분포하는 수층에 대한 평균 SV 값은 −43.41 dB이었다. 이로부터 다양한 생물군이 인공어초 주변에 서식하고 있음을 알 수 있었고, 조사 당시이 어초 주변 수역에서는 인근 어촌계 어민들이 어초시설 부근에 설치한 부이(buoy)에 선박을 고정시킨 상태에서 외줄낚시, 연승 등에 의한 조업을 행하였는데, 이들 어선에서 어획한 주요 어획생물은 조피볼락, 불볼락, 돌돔, 쥐노래미, 성대 등이었다.
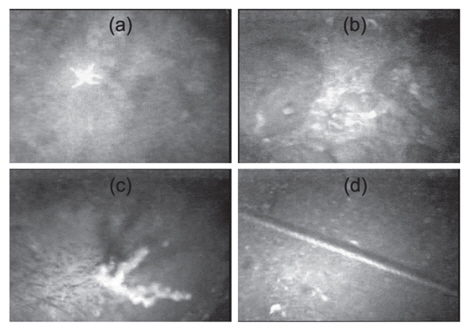
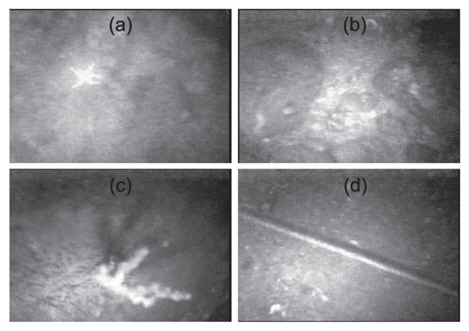
Fig. 11은 Fig. 4에 나타낸 정점 b의 인공어초 시설해역에서 수중 CCTV 카메라 시스템을 사용하여 수록한 카메라 영상의 일례이다.
Fig. 11의 카메라 영상을 수록할 당시에 유속이 빨라 CCTV 카메라 장치가 목적하는 어초시설에 정확하게 도달하지 않아 어초 주변에 군집한 어족생물은 촬영할 수는 없었지만, 어초 주변에 설치된 연승의 모릿줄(d)과 어초에 붙어 있는 문어(b), 산호류(c) 및 불가사리(a) 등을 확인 할 수 있었다. 향후에는 해수유동에 따른 CCTV 카메라 장치의 불안정한 움직임을 보완하여 해수유동에 영향을 받지 않는 해저 고정형 수중 CCTV 카메라 시스템을 고안하여 목적하는 인공어초 시설에 내유하는 어종과 정착성 어종을 보다 정량적으로 평가, 분석할 필요가 있다고 판단된다(Friedlander et al., 2007; Lee, 2011).