As most the scanning systems developed until now provide radiation scan plane images of the inspected objects, there has been a limitation in judging exactly the shape of the objects inside a logistics container exactly with only 2-D radiation image information. As a radiation image is just the density information of the scanned object, the direct application of general stereo image processing techniques is inefficient. So we propose that a new volume-based 3-D reconstruction algorithm. Experimental results show the proposed new volume based reconstruction technique can provide more efficient visualization for X-ray inspection. For validation of the proposed shape reconstruction algorithm using volume, 15 samples were scanned and reconstructed to restore the shape using an X-ray stereo inspection system. Reconstruction results of the objects show a high degree of accuracy compared to the width (2.56%), height (6.15%) and depth (7.12%) of the measured value for a real object respectively. In addition, using a K-Mean clustering algorithm a detection efficiency of 97% is achieved. The results of the reconstructed shape information using the volume based shape reconstruction algorithm provide the depth information of the inspected object with stereo X-ray inspection. Depth information used as an identifier for an automated search is possible and additional studies will proceed to retrieve an X-ray inspection system that can greatly improve the efficiency of an inspection.
인류 역사상 최악의 테러사건으로 손꼽히는 2001년 미국에서 발생한 9.11 테러 사건은 전 세계적으로 보안 검색에 대한 패러다임을 변화시킨 중요한 사건이다. 9.11 사태 이후 미국에서는 자국으로 유입되는 수출입 물류에 대한 보안 및 안정성 강화를 위해 모든 컨테이너 물류에 대하여 방사선 검색 의무화를 미국항만보안법에서 규정하고 있으며, 공항 항만 등에서의 보안 검색이 강화되며 X-선을 이용한 스캔은 큰 이슈로 떠오르게 되었다.
X-선을 포함하는 방사선 검색에 있어서 문제는 스캔을 통해 획득된 영상에는 검색 대상의 밀도 정보와 형상의 단면 정보만을 제공하기 때문에 대상에 대한 식별의 어려움이다. 현재 모든 공항, 항만 등에서 사용되는 검색장치는 사람에 의해 제어되고 검색되므로 반복적인 2차원 밀도 정보를 통한 검색 대상의 판별은 검색을 진행하는 사람의 사전 지식이나 경험 등에 의해 좌우되므로 효율적인 검색이 이루어 질 수 없다. 그렇기 때문에 가시적인 면에서 형상 정보를 제공할 수 있는 기술이 요구되고 있다. X-선 스캔을 통해 가시적인 형상정보를 제공하는 기법으로는 CT(Computed tomography)나 MRI(Magnetic resonance image)와 같은 방법이 있지만 이러한 방법은 검색 대상에 따라 크기의 제한이따르고 검색시간이 매우 길며, 검색시설을 구비하는 데있어 막대한 비용이 필요하다는 문제가 있다.
기존의 보안검색용 X-선 검색장치들은 검사 대상물의 단면 정보만을 스캔하여 밀도 정보로 이루어진 2차원 영상 정보만을 제공하고 있다. 일반적으로 2차원 영상 정보만으로는 물체에 대한 구분에 한계가 있으며, 구분하는 사람의 경험 및 지식수준에 따라 오차를 발생시킬 수 있다. 앞서 언급한 것처럼 고속 검색을 위해서는 자동화된 검색 장치가 필요하며 자동화 검색을 이루기 위해서는 검색대상에 대한 판단을 위해 검색물체에 대한 식별자가 필요하다. 밀도정보와 단면 정보만을 제시하고 있는 X-선 영상에서의 식별자는 제한되어 있어 검색효율 개선을 위해서는 새로운 식별자가 필요하다[1-3].
본 논문에서는 스테레오 영상을 이용한 볼륨기반 형상복원을 이용하여 새로운 식별자에 대한 요구에 맞추어 검색 효율개선을 위해 가시적인 형상정보를 제공함으로써 자동화 시스템을 위한 새로운 식별자를 제시하고자 한다. 이를 위해 기존의 단면 정보만을 스캔하는 검색장치에 시차정보를 얻기 위한 검출기 하나를 추가로 구성하여 스테레오 X-선 영상을 획득하고, 획득된 영상으로 부터 검색 대상에 대한 형상 정보를 복원한다. 기존의 시스템에 하나의 검출기를 추가하므로 비용 부담을 줄일 수 있을 뿐만 아니라, 검색장치를 통해 대상을 검사하는 오퍼레이터에게는 가시적인 형상정보를 제공함으로써 검출 효율을 높일 수 있고, 검색장치의 자동화를 위한 데이터베이스의 식별자로 깊이 정보를 제시한다면 X-선 기반 자동 검색장치의 검색 효율을 개선하는데 크게 기여할 수 있다.
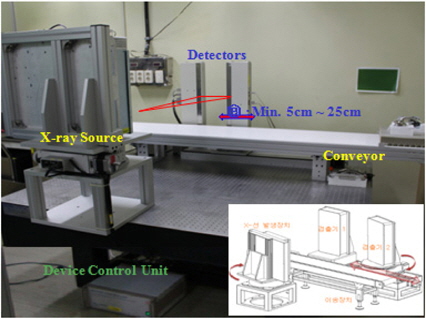
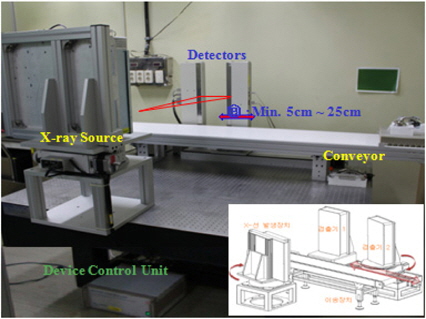
스테레오 X-선 검색장치의 모습은 그림 1에 나타내었다. 검출장치의 획득 영상에 대하여 3차원 정보를 획득하기 위해 기하학적 구조는 구조에 대한 모델링을 통해 이를 최적화 하였다. X-선 선원 회전, 검출기 회전 및 스테레오 검출기간의 거리를 정밀하게 제어하여 그림 1과 같은 직각 삼각형 구조로부터 스테레오 형상복원을 위한 파라미터를 도출한다. 또한 컨베이어의 속도를 측정, 계산하여 X-선 동작 타이밍 조절 및 검출기 검색속도와 동기화를 통해 최적영상을 획득한다.
X-선 발생장치는 관전압이 40kV에서 최대 120kV까지 인가할 수 있고, 관전류는 250uA에서 7500uA 범위내에서 조절이 가능하다. X-선 발생 기준위치는 발생장치의 전면부로부터 81.75㎜ 안쪽에, 밑면으로 부터 101.6㎜ 위쪽, 그리고 왼쪽 모서리를 기준으로 367.05㎜에 위치한다. X-선 빔의 방출부위에는 필터 기능을 하는 0.4㎜ 두께의 알루미늄이 놓여 있고, X-선 방출 빔의 각도는 상하 80°, 좌우 각도가 최대 10°인 팬빔 형태를 가진다.
스테레오 방사선 영상을 얻기 위한 듀얼 라인디텍터는 선형배열센서(Linear array detectors)로 이루어져 있고, 검출기의 픽셀은 640개(Pixels)가 수직으로 적층되어 있다. 포토다이오드 센서는 X-선이 입사되는 0.1㎜의 알루미늄 윈도우로 덮여 있으며 개별 포토다이오드 센서의 구조는 높이 0.6㎜, 너비 0.3㎜, 간격 0.4㎜의 형태이고 앞쪽에 부착된 섬광체(CsI)에서 변환된 X-선의 광 정보를 취득하여 2차원 영상을 형성하게 된다.
최적의 검색 영상을 얻기 위해서는 등속으로 이동하는 컨베이어가 있어야 하고 컨베이어 속도와 영상 취득속도의 동기화가 필요하며 이를 위해 정밀 모터 제어를 위한 모듈을 설계하였다. 고속 정밀 제어 모듈은 컨베이어의 속도를 체크하여 디텍터의 취득 정보와 동기화 되어 영상을 스캔하도록 구성하였다.
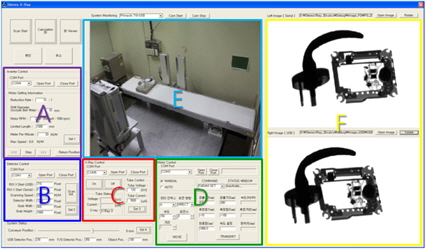
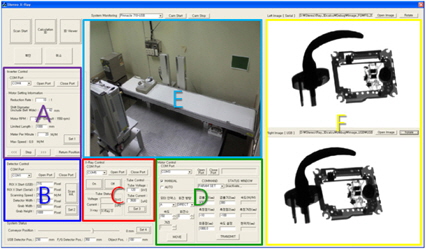
검색장치의 제어 및 영상 취득을 위해 설계된 스테레오 X-선 영상획득제어 프로그램은 그림 2와 같이 구현하였다.
그림 2의 A영역은 대상체의 이동속도를 설정하기 위한 컨베이어 설정 및 제어를 위한 부분이며, B영역은 영상 획득을 위한 스테레오 검출기의 설정부이다. B영역에서는 대상체의 관심영역(ROI), 획득영상의 사이즈, 영상 취득 속도 등을 설정할 수 있도록 개선하였다. C영역은 획득 영상의 품질을 결정하는 관전압, 관전류의 세기를 제어하기 위한 부분이고, D영역은 대상체의 이동에 대한 정보를 실시간으로 확인하고 속도를 측정하여 스테레오 검출기의 속도 동기화를 위한 모터제어부이다. 모터 제어부에서는 기하구조를 mm간격으로 제어 가능 하도록 구현하였다. E영역은 방사선 차폐벽 안쪽의 검색실을 모니터링하는 디스플레이 부분이며 F영역은 스테레오 검출기로부터 획득된 영상을 출력하는 부분이다. 획득된 영상은 3차원 형상 복원 연산을 수행하고 별도의 3D 디스플레이를 실행하여 출력결과를 나타내도록 구현하였다.
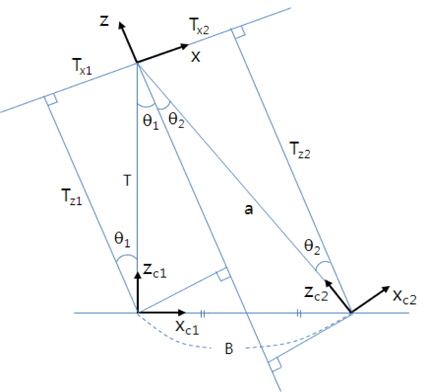
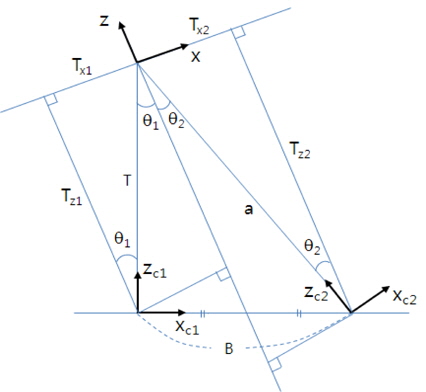
스테레오 X-선 영상 획득 장치에 대한 보정을 위해 센서에 대한 모델링은 Gupta와 Hartley가 제안한 Linear pushbroom 센서 모델링 기법을 개선하여 그림 3과 같이 표현하였다[4-6].
위 식에서 (u, v)는 영상면에서의 해당되는 좌표값이며, w는 배율, f는 초점 거리,
식 1을 정리하여
로 표현되는데, 여기서 미지항은 S, tan
또한, 식 1을 정리하여
로 정리되며, 여기서 미지항은
앞서 언급한 평행 투영변수와 원근투영변수들은 획득한 영상의 좌표점을 이용하여 의사역행렬(Psudo inverse matrix) 계산방법을 이용하여 값을 계산하였다.
지상기준점 대한 깊이 정보는
와 같이 나타낼 수 있으며, 두 영상의 좌표점으로앞서 전개한 수식을 다음과 같이 정리하여 획득 영상으로부터 물체의 원형 정보를 추출할 수 있다.
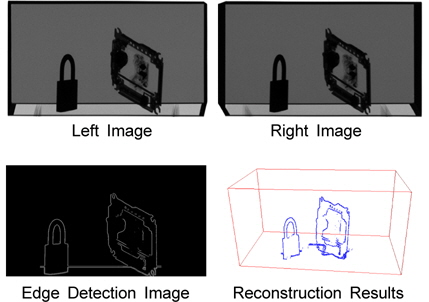
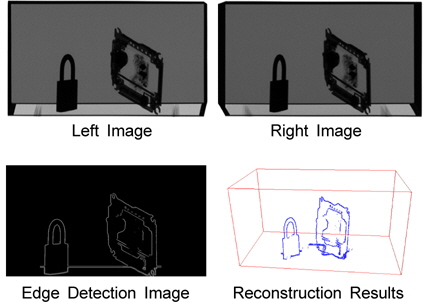
스테레오 X-선 영상복원은 가시광 카메라로부터 얻는 정보와는 달리 물체의 투과밀도 정보를 통해 복원해야 하기에 일반적인 스테레오 형상 복원 기법으로는 복원이 불가능하다. 기존의 스테레오 복원 기법을 방사선영상의 에지 부분만을 대상으로 정합을 시도하여 형상 복원한 결과는 그림 4에 대한 외형의 경계선 정보만을 복원하게 된다[7-9].
물체의 밀도정보가 최소화되는 에지영상만을 대상으로 정규 교차상관(Normalized cross correlation, NCC)을 기준으로 영상 의 특징점을 매칭한 복원 결과는 그림 4와 같이 형태 부분만을 확인할 수 있다.
그러나 이러한 에지기반 3차원 복원 알고리즘은 관측시점을 변화시킬 경우 3차원 정보가 불확실하게 복원되는 단점을 가지고 있다. 이는 물체의 외곽선이라 하더라도 스테레오 X-선 영상을 이용하여 복원한 결과는 물체가 놓여진 방향과 X-선 소스에서 센서의 직선상에 놓인 외곽선만 복원될 수밖에 없어 영상에서 보이는 물체의 외곽선만 주로 복원되고 물체의 내부 표면에 있는 외곽선은 거의 영상에 보이지 않아 외곽선의 완전한 모습을 복원하기에는 다소 부족한 점이 있다. 따라서 이러한 단점을 보완하기 위해 물체의 외곽선에 대한 3차원 복원을 구현하면서 동시에 물체의 전체 모습을 복원할 수 있는 체적(Volume) 기반의 3차원 복원 방법을 통해 형상을 복원하였다[8, 9].
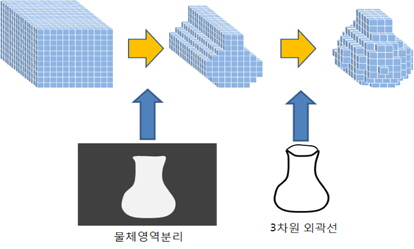
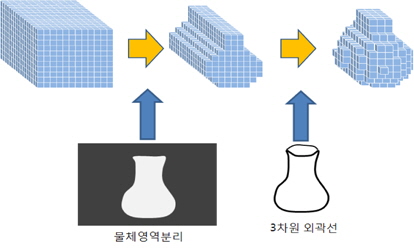
X-선 검사 대상 물체의 3차원 체적 복원의 순서를 그림 5에서 간략히 나타내었다. 우선 복원하고자 하는 3차원 공간에 수많은 복셀 (Voxel)로 구성된 체적을 생성한다.
이 체적의 크기는 복셀의 개수로 표현되며 가로, 세로, 깊이가 각각 W, D, H로 표현된다. 초기의 복셀 공간의 크기는 다음과 같이 정한다.
여기서 vx,vy,vz는 각각 하나의 복셀의 x,y,z 크기이다. 각 좌표방향의 최소, 최대는 3차원 외곽선 복원의 최소, 최댓값을 이용한다.
초기의 체적은 따라서 정방형의 공간을 차지하고 있다. 우선 스테레오 영상에서 물체의 영역을 분리한다. 다음으로 물체영역이 분리된 이진화 영상을 이용하여 초기 체적에서 배경에 속하는 복셀을 제거한다. 이 과정은 볼륨내 각각의 복셀을 물체 영상 공간으로 투영하는 단계를 거쳐 진행되며 3차원 공간의 점에서 물체의 영상 공간으로의 투영은 스테레오 X-선 시스템의 보정값에 의해 결정되며 식 (1)을 이용하여 계산할 수 있다.
3차원의 윤곽선 정보를 정의하고, 배경과 전경이 분리된 복셀공간의 임의의 점에 대해 내·외부에 대한 판정을 위해 다음과 같이 판정이론(Determinant theorem)을 정의한다.
여기서, 정의한 SD(a,x)는 x축상에서 폐곡선을 이루는 n개의 점에 대하여 x축상의 임의의 점 a와의 단위벡터의 합을 의미한다. 폐곡선이 n개의 점으로 구성된다고 하면 x축 성분에서만 볼 때, 최대값은 x(n/2), 최소값은 x(–2/n)가 된다.
3차원 윤곽선 함수에 의한 모든 점에 대하여 임의의 점A에 대한 내ㆍ외부 판정을 위해서는 다음과 같이 임의의 점 A에서 모든 점에 대한 각 성분(방향)별 합을 구해야 한다. 각 성분별 합은 다음식과 같이 표현할 수 있다.
여기서, n은 3차원 윤곽선 함수의 임의의 점을 의미하며, min(fn(x))는 윤곽선 함수의 가장 작은 x성분의 값을 나타내고, max(fn(x))는 가장 큰 x성분의 값을 의미한다. 마찬가지로 y성분과 z성분에서도 최소, 최대값을 의미한다. 모든 방향에 대해 내부점으로 판정될 경우 임의의 점 A는 3차원 윤곽선 함수 f(x)에 대해 내부점으로 판정할 수 있으며, 이를 다시 표현하면 복셀공간의 점 A가 내부의 점이되기 위한 필요충분조건은 다음과 같다.
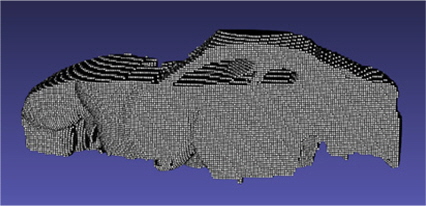
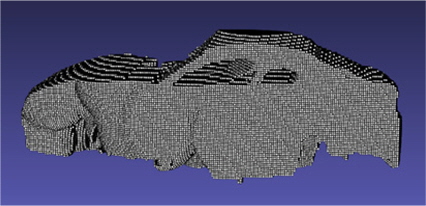
그림 6은 검색대상 모델의 실제 모습을 나타낸 것이며 그림 7은 제안한 형상복원 알고리즘을 적용하여 복원된 결과를 나타낸다.
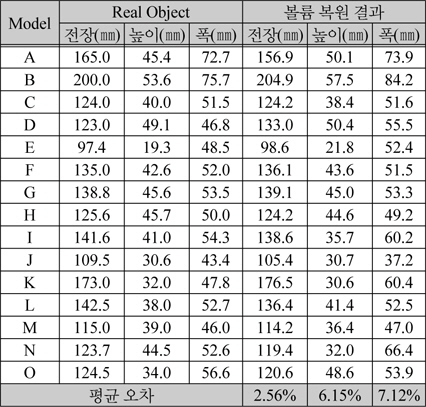
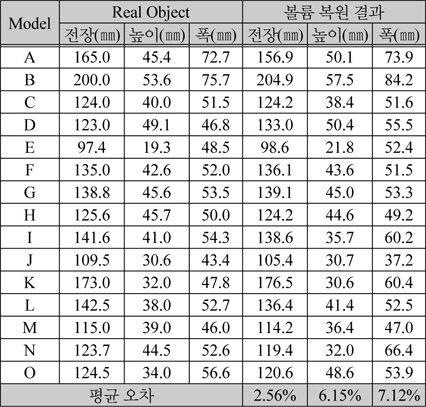
유사한 자동차 모형의 15개의 검색 대상체에 대하여 형상복원 된 결과는 표 1과 같이 획득하였으며, 실제 모형의 외형정보와 비교할 때 실측값에 대하여 너비(W), 높이(H), 깊이(D)에 대해 각각 평균 2.56%, 6.15%, 7.12%의 오차를 나타내었다. 이를 바탕으로 검색 대상체에 대한 검출효율 판정을 위해 샘플들에 대해 수 회 스캔하고 이를 통해 스캔장치로부터 검출률(매칭률)을 계산하였다.
실제 모형과 복원 모델의 비교
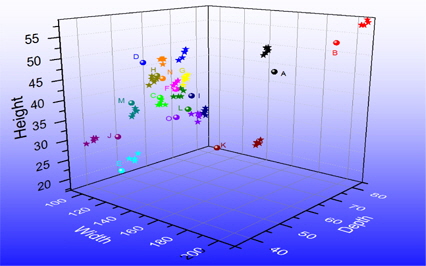
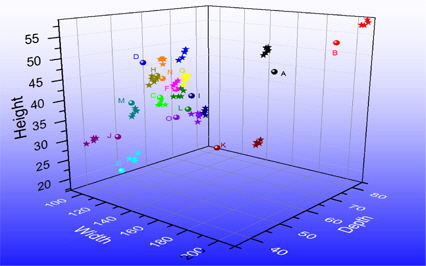
검출률 계산은 정보 계층화 기법인 K-Mean Clustering 알고리즘을 적용하여 진행하였다. 그림 8은 공간영역에서 나타낸 실측 모델과 검색 대상 물체의 결과를 나타낸 것이다. 분석결과 볼륨복원 결과를 보면 반복 수행 시 97%의 매칭률을 보이며, 매칭이 안되는 경우는 그와 흡사한 형태로 매칭 된다.
그림 8에 서 볼 때, 모델 G, F, L 등이 인접한 공간에 배치되어 있다는 것은 3가지 파라미터로 물체를 구분할 때 유사도가 높다는 것을 의미하며 이것은 새로운 군으로 설정 할 수 있다. 검색 과정을 통해 수회 스캔을 통해 데이터를 입력할 때 K-Mean clustering 계산 후 기준점인 Centroid 값이 변화하며 입력을 모두 넣은 후 변화된 기준 값인 Centroid와 실제 모델의 형상 정보를 비교해보면 15개 모델에서 평균적으로 너비, 높이, 깊이가 각각 0.55%, 1.24%, 5.53%으로 나타난다. 이러한 결과는 K-Mean 알고리즘 적용을 통한 검출 판정의 정확성을 나타낸다.
스테레오 검색 장치는 두 개의 검출센서를 이용하여 수화물에 대한 비파괴 검사를 진행하는 것이며, 최근 연구동향은 검색장치의 자동화에 집중되고 있다. 본 연구는 검출장치를 구현하고, 스테레오 X-선 영상을 획득한 후 3차원 복원 알고리즘을 적용하여 형상정보 복원을 수행하였다. 또한 스테레오 검색 장치를 통해 얻은 X-선 영상을 이용하여 검색효율 검증 실험을 진행하였고, 실험을 위해 선정된 대상을 반복 스캔하여 정보 계층화 기법인 K-Mean Clustering 알고리즘을 적용하여 입력값에 대한 매칭율을 계산하였다. K-mean clustering 알고리즘의 거리계산 함수는 Euclidean Distance 계산식을 사용하였고, 그 결과 특징점 기반 형상복원 기법을 적용하면 60%, 볼륨기반 형상정보 복원 기법은 97%의 검색율을 나타내며 높은 검색효율을 보였다.
본 논문에서는 검색물체에 대한 형상정보 복원을 위한 볼륨기반 형상복원 기법을 제안하였고, 높은 복원율을 확인하였다. 본 논문의 결과는 X-선 검색 장치의 효율 개선을 위한 기반기술로 활용할 수 있으며, 추후 듀얼 에너지를 이용한 밀도 정보차에 의한 대상 분석과 같은 검색 기법 등을 통해 기술적 보완이 이루어진다면 기존의 검색장치보다 한 단계 높은 수준의 새로운 검색장치를 구현할 수 있을 것이다.