Edge detection for such as image, lane and object recognition is important image processing method. And some traditional method for this, there are Sobel, Prewitt, Roberts, Laplacian, LoG(Laplacian of Gaussian) and so on. Characteristics of these methods are insufficient in the salt & pepper noise added image. In order to improve such a problem of conventional methods, in this paper, we proposed an algorithm applying the weighted mask for detecting an edge by setting the local mask centered on the adjacent of the central pixel if central pixel of the mask is non-noise, it is intactly set by element of estimated mask, after calculating estimated mask if it is noise.
에지 검출은 영상 분할 및 인식 과정 등 대부분 영상 처리의 전처리 과정에서 필수적인 요소이고, 군용 및 의료용 전자기기, 스마트폰, 자동차 번호판 인식 등 여러 분야에서 적용되며, 영상 처리 및 컴퓨터 비전 분야 에서 많은 연구가 활발히 진행되고 있다[1-7].
일반적으로 공간 영역에서 에지를 검출하기 위한 방법에는 Sobel, Prewitt, Roberts, Laplacian, LoG (Laplacian of Gaussian) 방법 등이 있다. 그러나 이러한 기존의 방법들은 비잡음 영상에서 에지 검출 특성이 우수한 반면, AWGN(additive white Gaussian noise) 및 salt & pepper 잡음에 훼손된 영상에서 처리 특성이 미흡하다[8-10].
따라서 본 논문에서는 salt & pepper 잡음 환경에서 에지 검출을 위하여 입력 영상 마스크의 중심 화소를 기준으로 인접한 이웃 화소에 대한 9개의 국부 마스크를 설정하여 그것의 중심 화소의 잡음 여부를 판단한다. 판단 결과에 의해 비잡음일 경우 그대로 처리하고, 잡음일 경우 국부 마스크의 요소들 중 비잡음 요소들의 메디안 값으로 추정 마스크를 구한 후, 그 마스크에 가중치 마스크를 적용하여 에지를 검출하는 알고리즘을 제안하였다.
제안한 에지 검출 알고리즘의 성능을 확인하기 위하여 512×512 크기의 Cameraman 및 DSP 보드 영상에 salt & pepper 잡음(
Sobel 방법은 수평 및 수직 방향의 마스크로 구성되며, 식 (1)과 같이 정의된다[7-9].
여기서
Sobel 방법은 식 (1)에서
여기서,
Prewitt 방법은 Sobel 방법과 동일하게 수평 및 수직 방향의 마스크로 구성되며, 식 (1)에서
Roberts 방법은 대각선 방향에 대한 두 개의 마스크로 구성되며, 식 (3)과 같이 정의된다[13-15].
여기서
LoG 방법은 Gaussian 함수의 Laplacian 결과로 에지를 검출하는 방법이며, LoG 방법에 이용되는 마스크는 식 (5)와 같다[19-20].
여기서,
여기서 ∗ 연산자는 컨볼루션 연산자이다.
이러한 기존의 방법들은 비잡음 영상에서 우수한 에지 검출 특성을 나타내며, 잡음 영상에서는 특성이 미흡하다[19, 20].
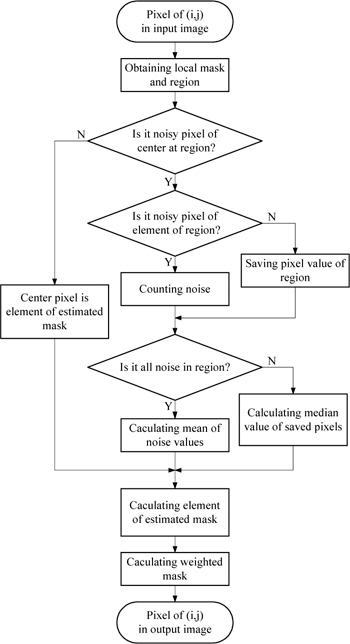
본 논문에서 제안한 에지 검출 알고리즘은 국부 마스크의 중심 화소가 비잡음일 경우 그대로 처리하고, 잡음일 경우 추정 마스크를 구한 후, 그 마스크에 가중치 마스크를 적용하여 에지를 검출한다.
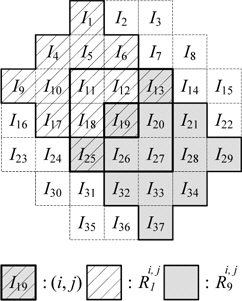
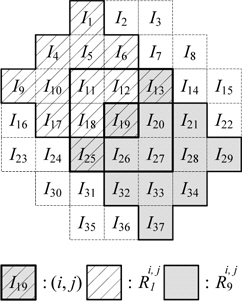
Step 1. 국부 마스크는 그림 1과 같이 중심 화소
그림 1에서, 빗금 영역은 국부 마스크 이고, 음영 영역은 국부 마스크 이다.
여기서, (
Step 2. 국부 마스크의 중심 화소가 비잡음일 경우, 그대로 처리하고 잡음일 경우 추정 마스크를 구하여 처리하며, 잡음 판단의 여부는 식 (8)과 같다.
여기서, (7)은 각 국부 마스크의 중심 화소이며,
Step 3. 각 국부 마스크의 중심 화소가 비잡음인 경우, 추정 마스크 요소는 식 (9)와 같다.
여기서
Step 4. 각 국부 마스크의 중심 화소가 잡음인 경우, 먼저 국부 마스크의 요소들에 대한 잡음 판단은 식 (10)과 같이 한다.
여기서, (
각 국부 마스크를 잡음 요소와 비잡음 요소로 나누며, 잡음 요소의 수를
여기서,
Step 5. 추정 마스크 요소는 국부 마스크의 잡음 요소와 비잡음 요소에 의해 결정되며, 식 (12)와 같이 구한다.
여기서,
Step 6. 추정 마스크
가중치 마스크는 효과적으로 에지를 검출하기 위하여, 중심 화소와 주변 화소의 거리에 따라 식 (14)와 같이 수평 및 수직 가중치를 설정하였다.
Step 7. 최종 에지를 구하기 위한 수평 및 수직 방향의 기울기는 추정 마스크에 가중치 마스크를 적용하여 식 (15)와 같이 구한다.
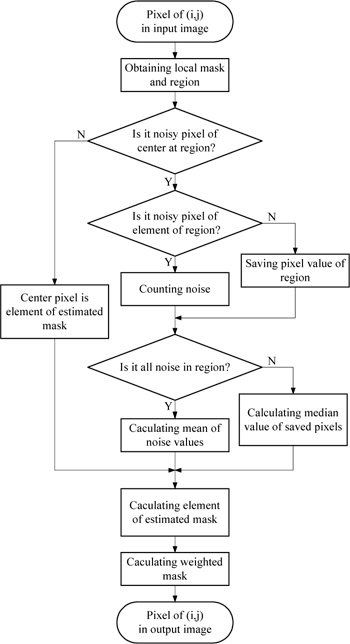
제안한 알고리즘의 최종 에지 결과는 식 (16)과 같이구한다. 그리고 제안한 알고리즘의 흐름도는 그림 2와 같다.
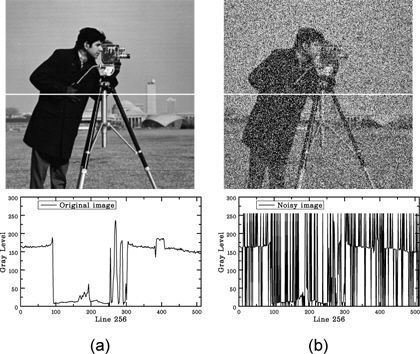
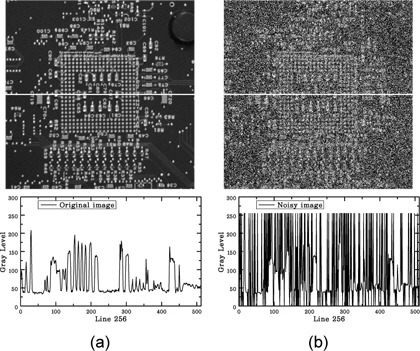
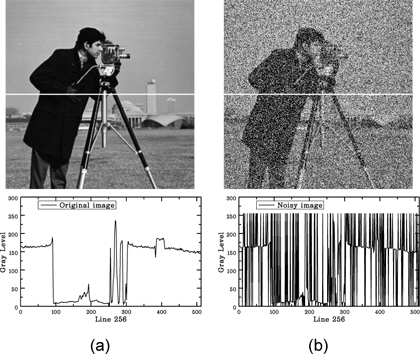
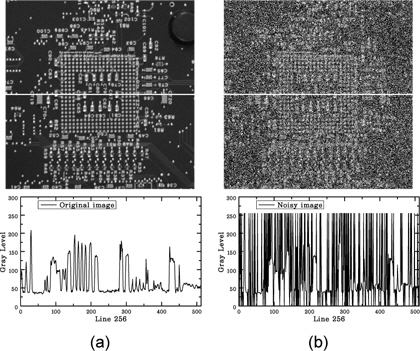
제안한 알고리즘의 에지 검출 성능을 확인하기 위하여 Cameraman 및 DSP board 영상에 45%의 salt & pepper 잡음을 첨가한 영상을 사용하여 시뮬레이션하였다.
그림 3, 4는 Cameraman 영상과 DSP board 영상의 원 영상 및 잡음 영상(
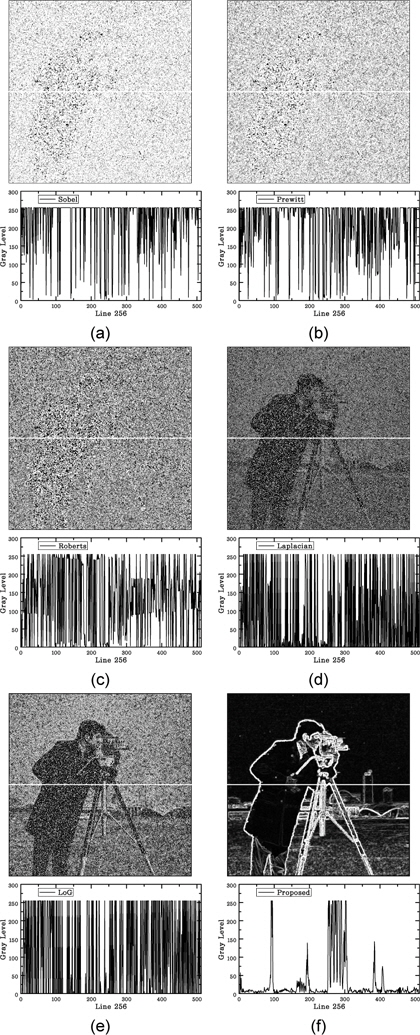
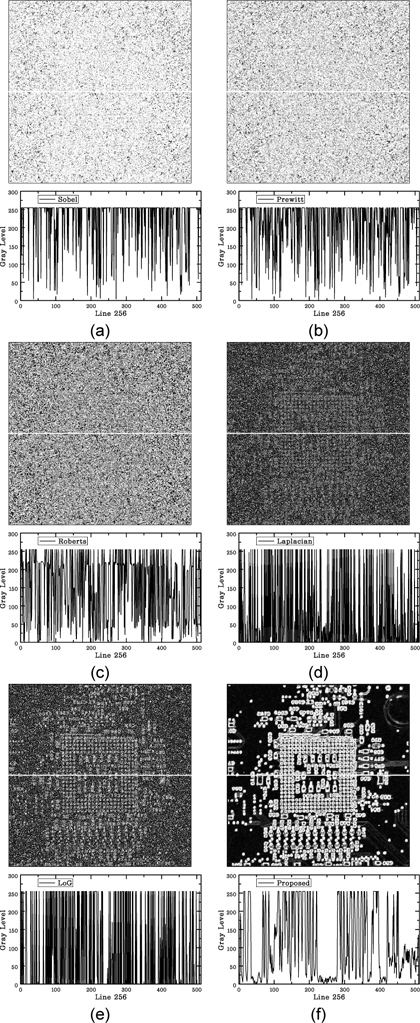
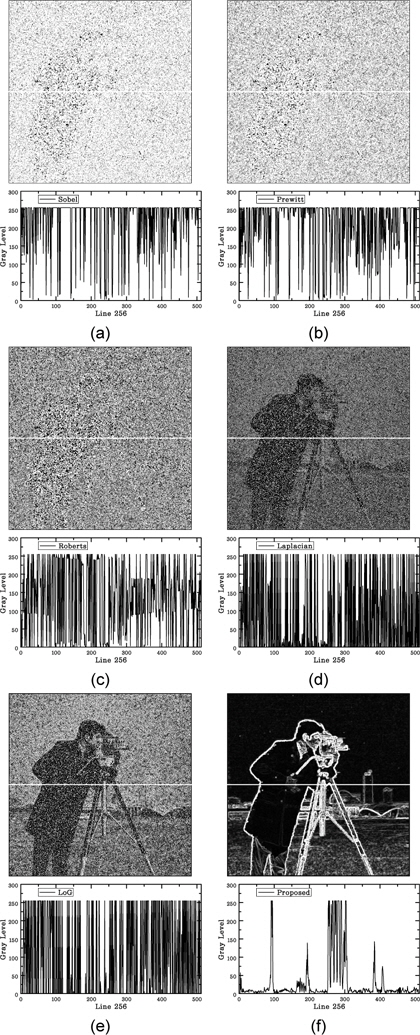
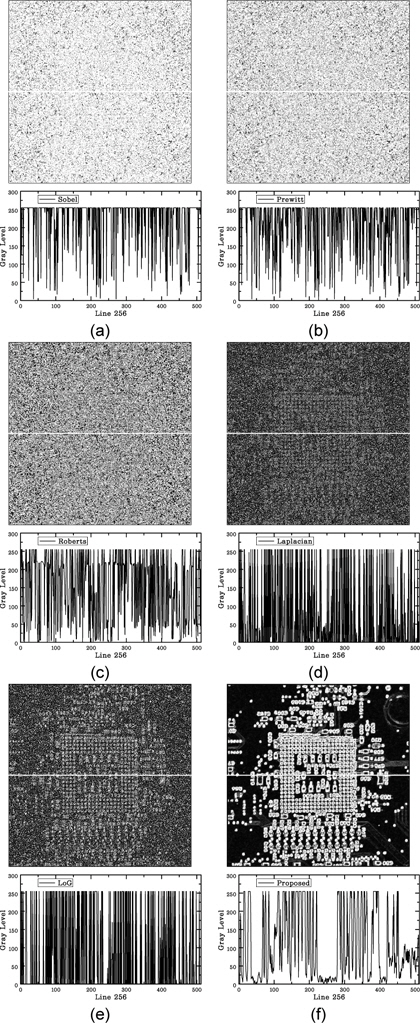
그림 5, 6은 Cameraman 영상 및 DSP board 영상을 사용하여 시뮬레이션 한 경우이며, (a)는 Sobel, (b)는 Prewitt, (c)는 Roberts, (d)는 Laplacian, (e)는 LoG 방법이며, (f)는 제안한 알고리즘으로 처리한 결과이다.
그림 5에서 Sobel 방법은 잡음에 의해 훼손된 부분이 에지로 처리되는 결과를 나타내어 에지 검출 특성이 미흡하였으며, Prewitt 방법은 Sobel 방법과 유사한 특성을 나타내었고, Sobel 방법에 비해 화소값의 포화 정도가 완화되었으나 에지 검출 특성은 미흡하였다. Roberts 방법은 잡음에 의해 훼손된 부분이 에지로 검출되어 Sobel 및 Prewitt 방법에 비해 포화 정도는 개선되지만 미흡한 에지 검출 특성을 나타내었으며, Laplacian 방법은 잡음 처리 특성이 Sobel, Prewitt, Roberts에 비해 우수하였으나 에지 검출 특성이 미흡하였다. LoG 방법은 잡음 처리 특성이 기존의 방법 중 가장 우수하였으며, 에지 검출 특성면에서 미흡함을 나타내었다. 그리고 제안한 알고리즘은 잡음의 영향을 대부분 제거하고 저주파 영역에서 우수한 에지 검출 특성을 나타내었다.
그림 6에서 Sobel 방법은 전반적으로 에지 검출 특성은 우수하였으나 잡음 처리 특성이 미흡함을 나타내었으며, Prewitt 방법은 포화된 영상을 나타내었다. Roberts 방법은 잡음의 영향으로 인하여 화소값이 자주 변화하는 영역에서 미흡한 에지 검출 결과를 나타내었으며, Laplacian 방법은 Sobel, Prewitt, Roberts에 비해 잡음 제거 특성이 우수하였고, 세밀한 에지를 검출하였으나 전반적으로 미흡한 결과를 나타내었다. LoG 방법은 잡음 처리 특성이 우수하였으며, 세밀한 에지를 검출하였다. 그리고 제안한 알고리즘은 기존의 방법들에 비해 잡음에 대한 영향이 가장 적었으며, 세밀한 영역의 에지도 잘 검출하여 우수한 에지 검출 특성을 나타내었다.
본 논문은 salt & pepper 잡음 환경에서 에지 검출을 위하여 중심 화소를 기준으로 인접한 이웃 화소에 국부 마스크를 설정하여 그것의 중심 화소에 대해 잡음을 판단하며, 비잡음일 경우 그대로 처리하고, 잡음일 경우 비잡음 요소들의 메디안 값으로 추정 마스크를 구한 후, 그 마스크에 가중치 마스크를 적용하여 에지를 검출하는 알고리즘을 제안하였다.
에지 검출 특성을 확인하기 위하여 Cameraman 영상 및 DSP board 영상에
따라서 제안한 알고리즘은 salt & pepper 잡음 환경에서 에지 검출 특성이 우수하여, 물체 인식, 물체 검출, 차선 인식 등 여러 응용분야에 유용하게 적용될 것으로 사료된다.