RFID technology has evolved from basic operation like the acquisition of tag IDs into a more complicated operation such as the simultaneous acquisition of tag IDs and their positions and recently, is raising the possibility of obtaining additional informations, which include their velocities, directions and distances. In this paper, we present a RFID system that can fullfil aforementioned advanced functions. In the proposed system, a tag transmits a sequence of FMCW pulses modulated by ID signals and a reader separates the tag signals in azimuth direction using an array antenna, followed by the FMCW demodulation from which distances, velocities as well as the tag IDs are extracted. We propose a receiver structure of the reader and theoretically analyze its operability. Moreover, its performance is examined by simulation.
RFID 기술은 수동형, 능동형, 반능동형, 반수동형 등 다양한 모드로 동작할 수 있으며 각 모드는 사용 주파수 및 응용분야가 상이하게 발전하였다[1, 2]. 국내의 경우는 수동형 모드가 가장 대표적으로 사용되고 있으며 그 가운데 900MHz Gen2 프로토콜 및 13.56MHz 유사 Gen2 프로토콜이 기술 표준으로 선정되어 이미 상용화되었다. 수동형 모드는 바코드를 대체하는 기술로 고속으로 대용량 태그를 인식하는 용도로 많이 사용되고 있다. RFID 적용 분야가 다양해지면서 열악한 전파채널 환경에서 태깅하는 기술에 대한 요구가 커지고 있다. 금속에 부착된 태그를 읽거나 고온의 환경에서 태깅하는 기술 등이 이에 속하며 또한 최근에는 고속으로 이동하는 물체를 태깅하는 기술에 대한 요구가 증가하고 있다[3]. 철도 레일에 RFID 태그를 심어 놓고 기차의 밑부분에 리더를 부착한 후 기차가 이동중에 태깅을 하고 태그 아이디를 무선으로 전송하므로써 기차의 위치를 실시간으로 트래킹하는 기술이 개발되었다[4].
이 외에도 동물들의 이동을 태깅하거나 ITS 시스템에서 고속으로 이동하는 차량을 태깅하는 기술에 대한 연구도 진행 중이다. 이상의 연구들에서 리더가 획득하는 정보는 태그 아이디 정보에 국한되어 있으나 최근들어 아이디 태깅 외에 태그 위치 정보를 동시에 획득하고자 하는 연구들이 많이 진행되었다. 카메라와 위치센서가 있는 리더가 태그 위치 정보와 영상을 매칭시키는 augmented reality 기술이 개발되었고 능동형 태그에 대한 아이디 및 위치 정보를 동시에 획득하는 연구도 발표되었다[5, 6]. 태그의 위치 정보를 획득하기 해서 리더는 FMCW (Frequency Modulated Continuous Wave) 펄스 파형을 사용하는 연구를 많이 하였고 FMCW 파형을 반사시키는 수동형 태그의 회로 설계 방법에 대한 연구 결과도 발표되었다[7].
FMCW 펄스 파형을 사용한 태그 위치정보 획득 외에도 입사되는 태그 신호를 복수의 리더 수신부를 사용해서 AOA(angle of arrival) 정보를 획득하는 방법도 발표되었다[8]. 향후 RFID 리더는 태그의 아이디, 위치정보 외에도 이동하는 물체의 경우 방향, 속도 등 부가 정보 획득이 요망될 수 있다. 태그를 부착한 물체가 고속으로 이동하는 경우를 예로 들면 태그와 RFID 리더간 거리가 급격히 멀어지면 수동형 모드로 동작하기 힘들며 특히 리더 태그간 통신을 하는 프로토콜의 inventory 과정에서는 주고 받는 메시지 교환 횟수가 많은 경우 물체가 리더 안테나 빔을 벗어나게 되어 Gen2 프로토콜을 적용시키기 힘들다. 메시지 교환 횟수를 줄이기 위해서 FDMA를 사용하는 PJM 모드 표준도 있지만 이는 13.56MHz 표준으로 근거리 용도이며 이 경우에도 모든 태그를 태깅하기 위해서는 많은 횟수의 메시지 교환이 필요하다[9]. Binary tree 프로토콜도 메시지 교환횟수는 줄일 수 있지만 리더가 inventory 과정을 수행하는데 시간이 걸려 고속으로 이동하는 표적에 대한 태깅은 여전히 어렵다. 다수의 이동 태그를 인식하고자 할 때, FDMA 기술은 기본적으로 성능 향상을 가져올 수 있으나 본 논문에서는 FDMA 외에 리더에 배열 안테나 등을 사용한 SDMA 방식을 통해서 태그 missing 확률을 최소화하는 RFID 시스템 및 신호처리 과정을 제안한다. 이를 위해 II. 절에서는 시스템 요구 조건 및 환경에 대해 시스템 모델링을 하고 III. 절에서는 리더/태그 시스템을 제안하고 관련된 신호처리 과정을 이론적으로 설명하며 마지막으로 IV. 절에서 시뮬레이션을 통해 성능을 검증한다.
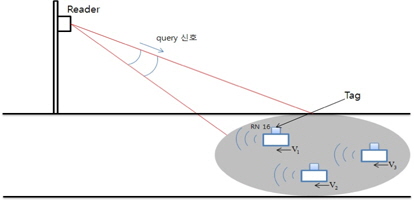
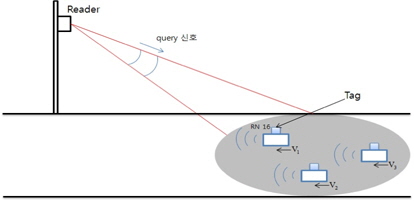
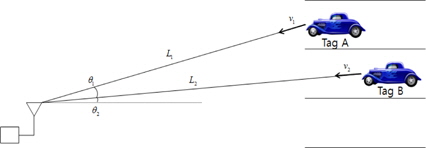
그림 1은 고정된 RFID 리더를 이용해서 이동하는 물체에 부착된 태그를 읽는 환경을 도식화한 그림이다. 태그가 부착된 이동하는 물체는 연속적으로 리딩 거리내로 들어오고 있으며 RFID 리더는 태그가 리더 안테나 빔폭을 벗어나기 전에 missing 확률을 최소화 하면서 수십 또는 백미터 이상 떨어져 있는 태그를 읽어야 한다.
그러므로 태그는 active 이거나 semi-active 로 동작해야 하며 리더 태그간 프로토콜을 단순화해서 메시지 교환을 최소화해야 한다. 이를 위해 본 논문에서 제안한 리더/태그 시스템은 두 종류의 신호를 송수신하는 것으로 설계하였다. 첫 번째 신호는 리더 태그간 시간동기를 위해서 리더가 전송하는 신호다. 즉 태그가 아이디를 전송하는 순간을 리더가 추정하도록 리더가전송하는 동기 신호로 Gen2 프로토콜의 query 신호가 여기에 해당한다. 동기신호로는 CDMA 시스템에서 사용하는 PN 시퀀스 등을 사용할 수 있으며 리더는 동기신호에 대해서 PSK 변조 등 디지털 변조를 한 후 신호를 정해진 영역으로 전송한다.
태그 수신부는 동기신호를 수신하게 되면 carrier 동기, 코드 동기를 수행하면서 동기신호 수신 순간부터 미리 설정된 시간을 지연시킨 후 태그 아이디 신호를 전송할 수 있도록 하는 기능을 갖도록 설계되어야 한다. 두 번째 신호는 미리 설정된 시간에 각 태그들이 아이디 정보를 변조하여 리더에게 전송하는 신호로서 거리방향으로 충분한 해상도를 가지며 속도 추정이 가능한 신호를 전송한다. 결국 두 종류 신호의 송수신을 위해서 태그 모뎀부는 동기 신호로 부터 도달 시간을 추출할 수 있는 코드동기 회로부 및 미리 설정된 시간이 지난 후 태그 아이디를 변조하는 변조부로 구성되어야 하며 리더는 수신신호를 복조하여 거리, 속도 및 아이디를 추정할 수 있어야 한다. 제안된 시스템에서는 Gen2 프로토콜 처럼 리더와 태그간 메시지(message) 교환절차가 복잡하지 않고 각각 한번씩 만 이루어지도록 하며 태그 아이디 데이터 전송률은 보통의 RFID 시스템에서 처럼 수십 내지 수백 kbps 라고 가정하고 전체 시스템 파라메타를 설계하였다.
리더 태그간 시간 동기를 위해서 리더가 전송하는 동기신호 변조 과정 및 이 신호를 수신한 태그가 복조 및 동기를 획득하는 과정은 보통의 이동통신 단말기에서 이루어지는 과정과 유사하다. 본 절에서는 이 과정은 생략하고 태그가 아이디 정보를 변조하고 리더가 이 신호를 복조한 후 태그를 구분하는 과정에 대해서 설명하고자 한다.
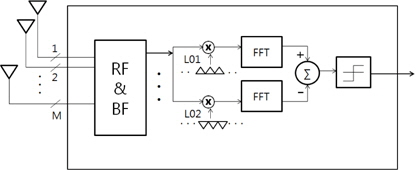
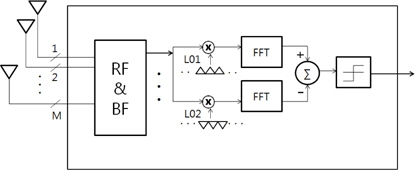
그림 2는 본 논문에서 제시하는 리더 시스템의 블록도이다. 리더는 태그가 전송한 신호를 방위각 방향으로 구분하기 위해서 빔포밍(beam- forming) 기법을 적용하며 이를 위해 안테나는
빔포밍 과정 설명을 위해 리더 빔내에 하나의 태그표적이 이동하고 있으며 리더 안테나에 대해 태그가
여기서
여기서
여기서
여기서
여기서
수신신호 벡터 r가
그러므로 입사 방향과 동일한 방위각으로 수신되는 FMCW 신호가 빔포밍 후 얻어진 신호 형태는 일반 협대역 신호의 경우 처럼 첫 번째 소자에 수신된 신호와 동일해진다. 하지만 이것은 (5)의
빔포밍 후 리더 시스템은 모뎀부를 통해서 FMCW 신호 복조를 한다. 우선 본 절에서는 수신되는 태그 아이디 신호를 안다고 가정하고 모뎀부 동작을 설명한 후 이어서 일반적으로 모르는 경우에 대한 복조 과정을 설명하고자 한다.
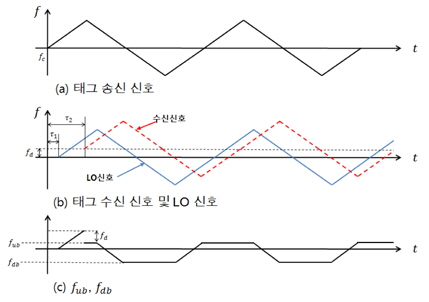
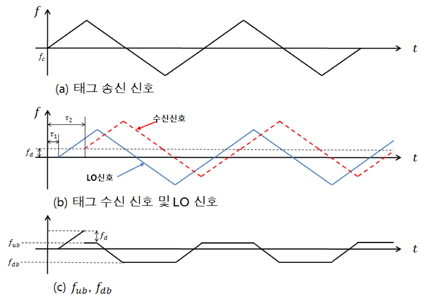
그림 3(a)는 태그 아이디가 예를 들어 1010 인 경우 태그가
그림 3(b)의 수신신호에서 τ2 는 전파가 태그를 출발해서 리더에 도달하는데 걸리는 시간을 나타낸다. 태그가 접근하는 경우 도플러 속도에 기인해서 도플러 주파수
실제로 리더는 태그 아이디 정보를 미리 알 수는 없으므로 dechirp 과정을 위해서는 그림 2에서 처럼 두 가지(branch)로 dechirp 과정을 수행해야한다. 윗가지에서 는 데이터 ‘1’ 변조신호의 기준신호를, 아래 가지에서는 ‘0’ 변조신호의 기준 신호를 수신신호에 믹싱한 후 각각 FFT를 수행하며 FFT 결과 얻어진 파형의 피크값을 비교하여 FMCW 신호의 복조를 수행한다. 주파수 관점에서 수신신호와 동일한 파형의 기준신호가 믹싱된 경우 믹싱된 신호는 상수 주파수가 되어 FFT 연산 결과 큰 피크값을 얻게 되고 수신신호와 기준신호가 다른 경우 는 믹싱된 신호의 주파수가 시간에 따라 변하여 FFT연산 결과 피크값이 작은 값을 갖게 되어 두 가지에서 얻어진 최대값을 비교하므로써 데이터 복조가 가능하다. 그림 2의 LO1과 LO2 신호파형의 길이는 태그 아이디 신호파형 길이와 동일하다. 결과적으로 리더 모뎀부는 두 가지에서 FFT를 수행한 후 피크값을 비교해서 데이터를 복조하면서 피크가 큰 가지에서
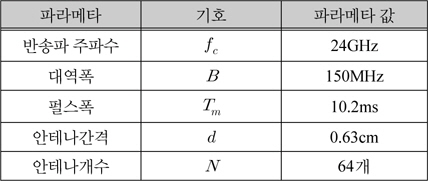
제시된 시스템의 성능분석을 위해서 다음과 같은 시스템 환경에서 시뮬레이션을 수행하였다.
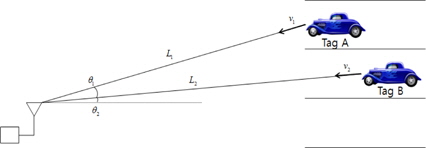
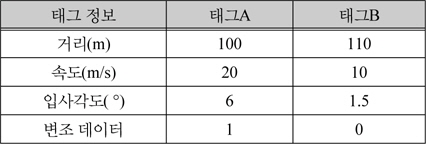
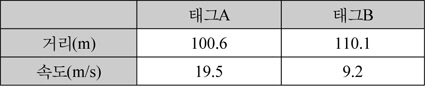
태그A는 리더와
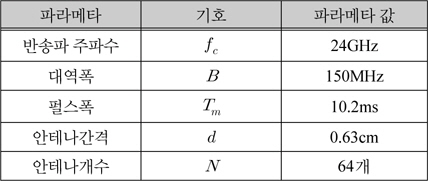
RFID 시스템 파라메타
태그A와 태그B가 리더로 전송한 신호를 생성하기 위해서 거리, 속도, 각도는 표 2의 값을 이용하였다. 표 1에서 제시된 파라메타 값을 사용하는 경우 리더 안테나의 빔폭(beamwidth)은 가 되어 2도가 된다.
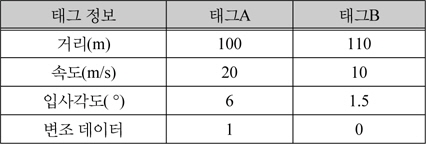
태그의 거리, 속도, 각도
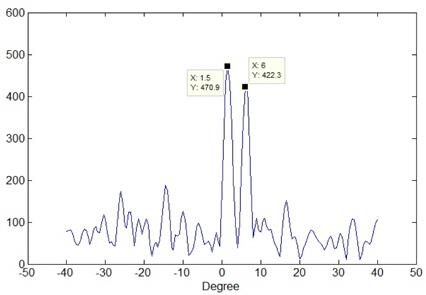
리더로 부터 리딩 영역 중심까지의 거리가 100m 이고 도로의 전체 폭이 21m 라고 하자. 이 경우 7개의 빔폭이면 전체 도로를 커버할 수 있으므로 빔포머는 0도, ± 2도, ± 4도, ± 6도 에서 수신되는 신호를 통과시키도록 공간 필터링을 하면 된다.
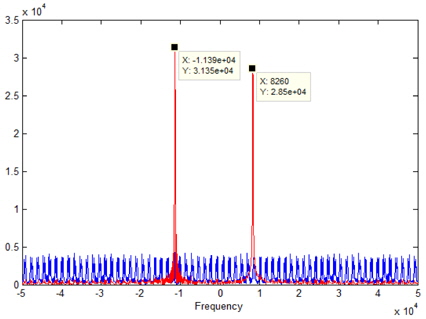
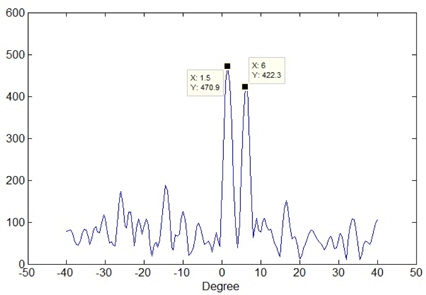
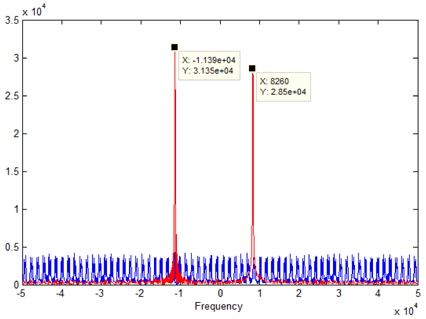
그림 5에서는 빔포머의 steering 각을 변화시키면서 두 태그로 부터 수신된 신호에 대한 빔패턴이다. 신호의 입사각과 동일한 각에서 피크값이 뜨는 것을 확인할 수 있었다. 빔포머의 steering 각도가 2도인 경우와 6도인 경우 각각에 대해서 공간 필터링을 한 후 FMCW 복조를 하였다. 6도인 경우는 태그 신호 방향과 동일하여 복조 성능이 좋을 것이므로 여기서는 태그 신호가 1.5도에서 입력되고 빔포머는 2도에서 공간필터링을 한 후 복조했을 때의 결과를 제시하였다. 그림 6은 그 결과로 서 ‘0’을 FMCW 변조한 신호가 기준 신호와 믹싱된 후 FFT한 결과이다.
리더 모뎀부의 윗 가지(그림 2 참조)를 통과한 신호의 FFT 결과는 그림 6에서 잡음처럼 바닥에 깔려있는 부분이며 아래 가지를 통과한 후 FFT한 결과는 두 피크값을 갖는 파형이다. 이 두 피크의 위치가 각각

거리 및 속도 추정값
제시한 시뮬레이션 환경처럼 잡음 전력이 크지 않은 경우에는 빔포머가 공간 필터링에서 적용한 각인 2도가 신호의 입사각인 1.5도와 차이가 있었지만 거리 및 속도가 거의 정확하게 찾아짐을 알 수 있었다.
본 논문에서는 고정된 RFID 리더가 리딩 영역에 들어오는 속도가 다른 복수의 이동 태그를 읽으면서 태그 아이디 외에 거리, 속도 등 부가적인 정보를 추출할 수 있는 RFID 시스템을 제안하였다. 제안된 시스템에서는 리더와 태그간 주고 받는 메시지를 기본적으로는 한번씩 사용하면서도 빔포밍 기술을 적용하여 방위각 방향으로 태그 신호를 분리해서 복수의 태그를 읽을 수 있었다. 태그 아이디 정보는 FMCW 변조하여 전송하므로 써 태그 속도, 거리 등이 추출될 수 있음을 이론적 분석하였고 시뮬레이션을 통해서 검증하였다. 제안된 시스템이 성공적으로 동작하기 위해서는 태그의 동기신호 획득이 정확해야 한다. 본 논문에서는 동기 신호 획득이 정확하게 이루어졌다는 가정 하에 시스템을 제안하였으나 동기 오차는 필연적으로 발생하므로 동기 오차상황에서도 성능 열화가 적은 시스템 연구가 향 후 필요할 것으로 사료된다.