A water level measurement radar estimates beat frequencies to extract the corresponding water level information for water resource management. Therefore, it is required to maintain the high degree of reliability and accuracy in beat frequency estimates. However, Beat spectra of water surface return echoes can have very widely varying shapes according to system frequency linearity, measurement environments and weather conditions. Therefore, serious problems may arise in maintaining the reliability and accuracy of the conventional level estimation method. Therefore, in this paper, high resolution spectrum estimates are analyzed for improvement of the conventional method. These methods show that the more accurate level measurement can be possible on the condition that SNR is higher than a certain required threshold. However, if SNR is too low, the conventional method shows that estimates are more reliable than the suggested method though absolute errors are too large.
전자파를 이용한 레이다 시스템은 최근에 와서 자동차 및 산업용 센서로서의 활용성이 커지고 있으며 이외에도 다양한 응용분야에서의 연구가 진행되고 있다[1-3]. 앞으로도 더 많은 민수분야에서의 연구 개발이 이루어질 것으로 기대된다. 이러한 레이다 센서는 수자원 관리용으로도 그 중요성이 부각되고 있다. 수자원 관리를 위하여 기존의 방법으로 하천 및 강의 유량을 측정하는 것은 많은 인력과 비용 및 시간이 필요하다.
따라서 강, 하천 등의 수표면 높이를 측정 할 수 있는 레이다 센서에 관련된 연구가 이루어지고 있다. 이러한 레이다는 손상 및 장애 등이 발생할 가능성이 매우 낮으며 무인 원격조정으로 정보의 획득이 용이하고 정기적인 점검 및 정비 등이 간편하게 이루어질 수 있다.실제로 레이다로 측정한 결과들은 기존의 측정 결과 치들과 비교하여 볼 때 높은 신뢰성을 보이고 있다[4, 5]. 또한 저 전력 방사 및 구현의 용이성 등의 장점 때문에 최근에는 FMCW 방식의 레이다가 많이 활용되고 있다.
이러한 레이다에서의 수위 측정은 수면으로부터 산란 또는 반사되는 수신 전자파 신호의 비트 스펙트럼으로부터 주파수 정보를 추출함으로서 이에 대응하는 수위 정보를 나타내게 된다. 그러나 수면으로부터 수신되는 전자파 신호들은 측정 환경 및 기상 조건에 따라 매우 다양하면서도 복잡한 양상을 나타낸다. 즉 분산이 매우 작은 뚜렷한 피크 값을 보이는 전형적인 비트 스 펙트럼 신호를 보일 때도 있고 바람의 속도 및 방향에 따라 물결을 따라 수면파가 형성되어 측정 면의 수위차에 의하여 비트 스펙트럼의 분산이 매우 크거나 비대칭형으로 나타나기도 한다[5, 6].
그런데 이러한 수위 측정치, 즉 비트 주파수 추정치는 ±3 mm 정도의 수위 오차를 만족시켜야 하므로 매우 정확한 측정값이 요구된다. 그러나 가장 널리 사용되고 있는 기존의 FFT(DFT) 방법은 스펙트럼 해상도 문제가 발생할 수 있으며 zero padding 방법을 통한 interpolation 을 하더라도 측정치의 오차가 크게 발생할 수 있다. 물론 이러한 오차는 SNR 에 따라 다르게 나타나는데 일반적으로 수위 측정 레이다에서의 SNR 값은 상당히 높은 수준으로 유지될 수 있다는 점을 감안한다면 기존의 방법보다는 파라메터 추정 또는 잡음과 신호부 공간을 분리하는 eigen 벡터 방법을 통한 고해상도 스펙트럼 추정 방식을 적용하는 것이 더 정밀한 수위 측정치를 얻어낼 수 방법이 될 것이다. 따라서 본 논문에서는 수위 측정용 FMCW 레이다에서의 다양한 수신신호들을 적절한 방법으로 모의 구현하고 이러한 수면반사파에 의한 비트 스펙트럼에서의 주파수 추정치를 구하여 그 결과 값들을 비교, 분석하고자 한다.
따라서 본 논문에서는 수위 측정용 FMCW 레이다의 기본적인 구조를 설명하고 환경 및 시스템 내부적인 요인에 따른 수신 비트 스펙트럼의 모의발생 방법을 간단히 설명하였다.
Ⅱ. FMCW 레이다에서의 비트 주파수 및 거리 해상도
펄스 파형의 신호를 송출하는 경우와 달리 FMCW 파형을 사용하면 duty cycle 거의 100% 이기 때문에 첨두 전력을 대폭 줄일 수 있고 낮은 방사전력만으로도 충분한 정도의 수신 SNR 비를 유지할 수 있다. 즉 다음과 같이 표현되는 시간에 따른 선형적인 변조 방식의 파형이 널리 사용되고 있다.
식(1)에서 T는 대역변조 시간을 Fm 은 변조 기울기를 나타내며 삼각파형의 변조과정을 표시한다. 전체 변조 대역폭 B=TFm 이 된다. 따라서 복조하게 되면 다음과 같은 수신 신호를 얻게 된다.
where
식 (2) 에서 td 는 지연시간을 의미한다. 따라서 수면과의 거리가 r 이라고 하면 다음과 같은 수신 비트 (beat) 주파수와 수위와의 직접적인 관계식을 얻을 수 있다.
식 (3)에서의 c는 빛의 속도, 즉 전자파의 속도이며 표시된 것처럼 수위 즉 거리정보는 비트 주파수에 직접적으로 비례하게 된다. 식(3)의 분자에 나타나는 비트신호의 관찰 가능시간 T 와 비트 주파수 fb 의 해상도를 살펴보면 비트 주파수의 해상도는 1/T 로 나타난다는 것을 알 수 있으며 따라서 거리해상도는 c/2B 로 표시될 수 있다는 것을 확인할 수 있다.
레이다 수위 측정기에서 일정한 거리 만큼 떨어진 하천 및 강 등의 수면으로부터 반사 또는 산란되어 수신되는 전자파 신호는 일반적으로 수신 단에서 기저대역으로 변환된 후 비트 주파수 영역의 신호를 획득하게 된다. 이러한 수신 비트 스펙트럼은 시스템 내부의 파형 변조에서의 선형성 정도 및 측정 환경에 따라서 매우 다양한 형태를 나타낼 수 있다. 그러나 일반적으로 기상환경에 따른 측정 수면에서의 수위의 불균일성 및 파형변조에서 나타날 수 있는 비선형성 ,시스템 위상잡음 등을 고려하면 가우시안 스펙트럼 형태로 모의 구현하는 것이 가장 적절한 것으로 판단된다. 따라서 스펙트럼 폭 파라메터를 조정하여 분산의 정도가 다른 모의 비트 스펙트럼을 구현할 수 있다. 그러면 이러한 전력 스펙트럼 모델로부터 시간영역에서 비트 신호를 구현하는 방법을 고찰하여 보자.
레이다에 수신되는 시간 영역에서의 I 및 Q 신호는 수면반사파로서 각각 서로 독립적인 랜덤변수로 볼 수 있으므로 I 와 Q 값의 확률밀도는 joint Gaussian 으로 나타낼 수 있다. 따라서 신호의 크기는 Rayleigh 분포를 가지게 되며 여기서 얻고자 하는 전력신호 값은 지수분포(exponential distribution)를 가지게 된다는 것을 유도할 수 있다. 즉, I 및 Q 신호는 다음과 같이 쓸 수 있다.
식(4)에서 N 은 샘플링 된 데이터 숫자를 표시하며
이제 전체 비트 신호전력을 각각의 비트 주파수에 따른 주파수별 신호전력
그러므로 식 (5)에서 설정된 SNR 값 및 수면 반사 신호의 비트 스펙트럼 파라메터들을 이용하여 배경잡음을 포함하는 수면 비트 신호를 얻을 수 있다.
비트 스펙트럼의 주파수 추정에서 가장 중요한 것은 수위 즉 거리 정확도가 어느 정도 수준까지 유지될 수 있느냐 하는 것이 될 것이다. 이러한 정확도는 수신되는 신호의 SNR 값이나 파형변조에서의 비선형성, 위상 잡음정도 등에 따라 다르게 나타날 수 있지만 기본적으로는 해상도와 직접적인 관계를 가지게 된다. 따라서 이러한 해상도는 전통적인 방법에서는 관찰시간(데이터 획득시간)에 의한 주파수 해상도 제약이 발생하게 된다. 즉, 널리 사용되는 기존의 방법은 FFT 또는 DFT 기법을 이용하여 전력 스펙트럼 추정치를 구한 후 다음과 같이 비트 주파수를 추정한다.
그러나 이러한 방법은 주파수 해상도가 제약될 수 있을 뿐만 아니라 windowing 효과 등의 문제 때문에 상당한 오차가 발생할 가능성을 내포하고 있다. 물론 일반적으로 FFT 기법에서는 이러한 영향을 최소화하기 위하여 zero padding 을 통한 스펙트럼 interpolation 방법을 쓰고 있다. 그러나 앞에서 언급한 바와 같이 높은 정밀도가 요구되는 수위 측정 시스템에서는 신뢰도에 문제가 발생할 수 있다. 따라서 본 논문에서는 수위측정 값의 정확도를 개선하기 위하여 파라메어 추정에 의한 스펙트럼 모델 추정 방법과 신호 및 잡음 부 공간을 분리하는 아이겐(eigen) 벡터 방법을 적용하여 성능정도를 분석하였다.
우선 파라메터 추정에 의한 스펙트럼 모델 중에서는 연산양이 다소 적은 AR(autoregressive) modified covariance 방법을 선택하였다[7]. 또한 아이겐 벡터 방법(EV method)은 임의의 비례상수 가중치를 잡음 부공간의 각 아이겐 벡터에 상응하는 아이겐 값(eigen value) 의 역수로 선택하여 상대적으로 첨두치 발생 숫자의 오류를 줄일 수 있도록 하였다[8, 9].
다음 장에서는 이러한 전력 스펙트럼 추정 방법들을 이용하여 비트 주파수 추정에서의 정확도, 즉 수위 측정의 정확도를 비교, 분석하였다.
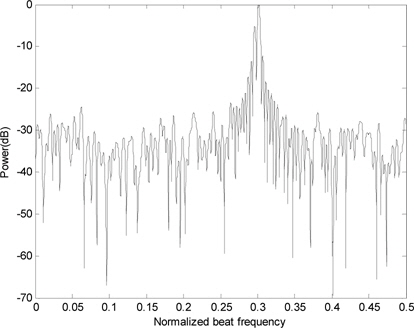
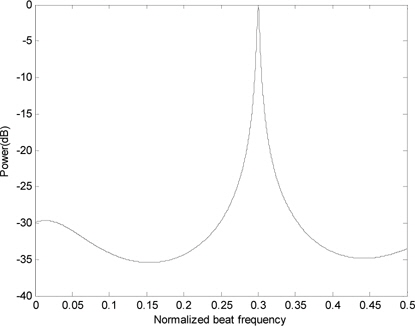
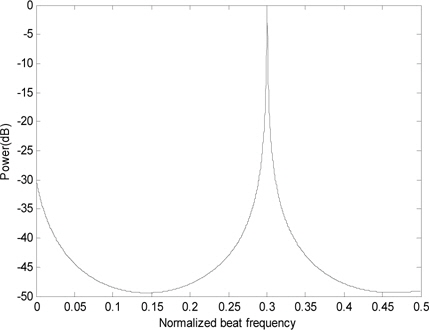
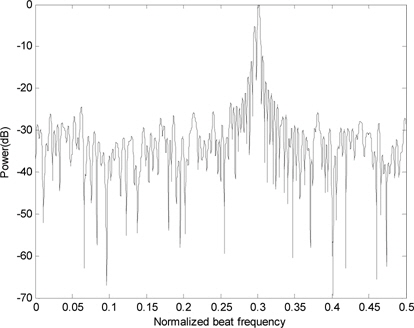
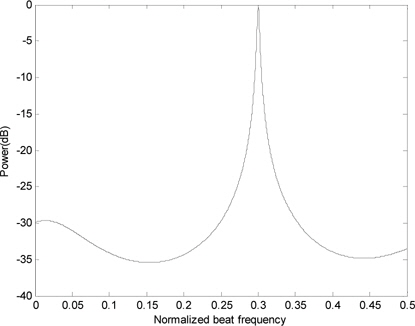
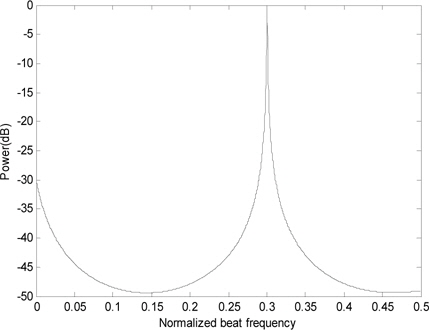
수위에 따른 비트 주파수 신호를 앞장에 서술한 바와 같이 SNR 이 10dB 이며 표준편차가 2cm 정도라고 가정한 360.0 cm 의 수위에서 발생하는 모의 구현 스펙트럼을 발생시켰다. 그러나 이러한 신호들의 FFT 스펙트럼 추정 해상도는 변조대역 폭에 의하여 좌우된다. 따라서 2GHz 대역폭의 수위 해상도는 7.5cm 가 될 것이다. 즉 실제로 수위 측정을 위한 신호 획득 시간은 50ms 이내에서만 가능해진다. 따라서 피크치가 빠지는 현상을 억제하기 위하여 zero-padding 하여 2048개의 포인트를 가지도록 한 후의 FFT 스펙트럼 추정치를 그림 1에서 나타내고 있다. interpolation 을 하였으나 스펙트럼 해상도 제약이 나타나게 된다. 그림 2와 그림 3에서는 128개의 데이터를 이용하여 각각 AR 방법과 아이겐벡터(EV) 방법을 적용한 스펙트럼 추정치를 보여준다. 그림들에서 보는 것처럼 측정에서의 정밀도가 요구되는 경우에는 기존의 방법에 문제가 발생할 수 있다.
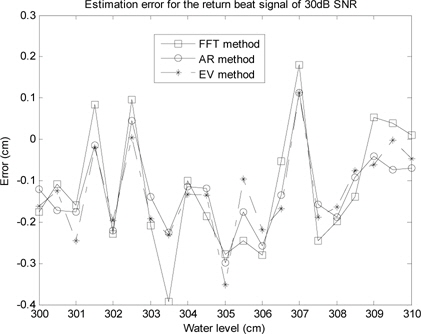
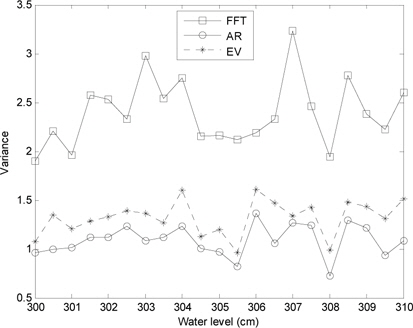
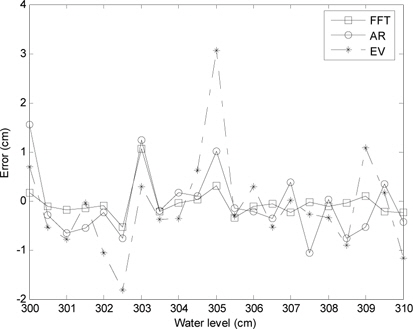
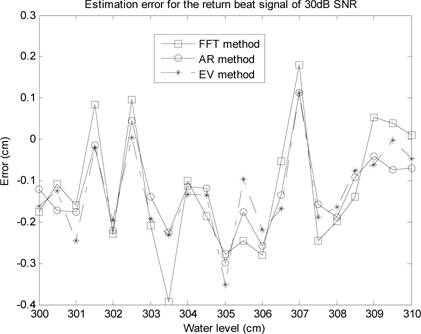
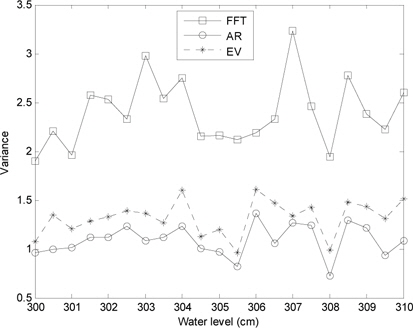
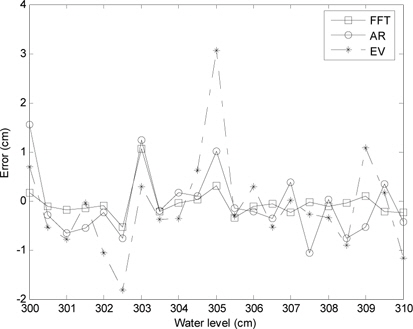
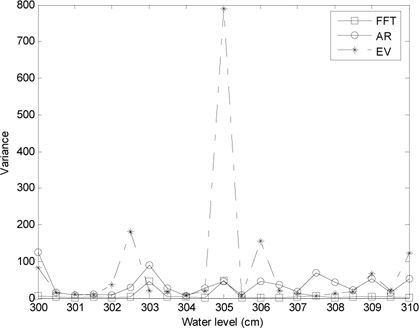
0.5cm 간격으로 20 개의 각 수위 측정 지점에 대하여 모의 구현한 I, Q 신호를 이용하여 앞에서 설명한 바와 같이 FFT, AR, EV 스펙트럼 추정을 이용하여 각각의 비트 주파수를 추출하였다. 각 수위 측정 지점에서 5초 동안 즉 50ms 씩 100번 추정한 후 그 평균값을 이용한 수위 측정치와 실제 수위와의 오차 및 수위 측정치의 분산을 그림 4와 그림 5에 표시하였다.
그림 4에서 볼 수 있는 것처럼 SNR 이 높은 경우 수위 측정 오차는 모든 방법에서 -0.4~0.3cm 정도 이내로 발생한다는 것을 알 수 있다. 그러나 상대적으로 AR 방법이 측정 오차가 가장 작은 범위에서 변동한다는 것을 확인할 수 있다. 또한 FFT 방법은 오차의 변동범위가 가장 크게 나타난다. EV 추정 방법이 AR 추정방법에 비하여 오차 변동 범위가 크게 나타나는 이유는 높은 주파수 해상도에도 불구하고 잘못된 주파수 첨두치 발생이나 첨두치 값이 과다 추정되는 경우가 발생하기 때문인 것으로 판단된다.
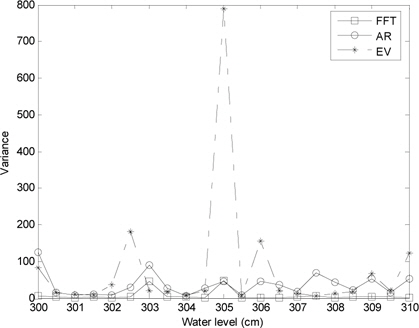
이제 SNR 이 현저히 낮은 0dB인 경우의 스펙트럼 추정 방식에 따른 측정 오차와 분산을 그림 6 과 그림 7 에 표시하였다. 그림 6에서 보는 것처럼 SNR 값이 낮아짐에 따라 전반적인 추정치의 오차가 상당히 크게 나타남을 알 수 있다. 또한 SNR 이 상대적으로 낮은 경우 EV나 AR 추정 방법에서의 내재적인 문제점으로 인하여 상대적으로 FFT 방법에서의 오차 범위가 더 작게 나타난다는 것을 확인할 수 있다.
그림 7에서의 분산을 살펴보면 신호의 SNR 이 낮은 경우에는 AR 또는 EV 스펙트럼 추정을 통한 비트 주파수 추정의 불확실성 정도가 지나치게 크다는 것을 알 수 있다.
본 논문에서는 FMCW 수위 측정 레이다에서의 측정 정밀도를 높이기 위한 비트 주파수 추정 방법을 검토하고 분석하였다. 본문에서 언급한 바와 같이 2GHz 대역폭을 사용하는 경우 해상도는 7.5cm 이다. 그러나 결과 그림들에서 볼 수 있는 것처럼 수위 측정치의 정확도는 적용 비트 주파수 추정 방법이나 수신 비트 신호의 SNR 정도에 따라 크게 개선될 수 있다. 일반적인 FFT 방법의 경우 비교적 낮은 SNR에서 안정적인 수위측정치를 얻을 수 있다는 장점이 있다.
그러나 수위측정에서 mm 단위의 높은 정밀도가 요구되는 경우에는 일반적으로 비트 신호의 SNR 값이 높게 유지될 수 있도록 시스템이 설계된다. 따라서 수신신호의 SNR값이 10dB 정도를 넘는 경우 기존의 FFT 방법보다는 AR 방법이나 EV 방법을 적용하는 것이 더 안정적이며 정확한 수위 측정치를 얻을 수 있다. 그러므로 본 논문에서 제시한 바와 같이 기준 이상의 SNR이 유지되는 상황에서의 높은 정밀도가 요구되는 수위 측정에서는 AR 스펙트럼 추정 방법을 이용한 비트 주파수 추정이 가장 안정적이고 정확한 결과를 얻을 수 있을 것으로 판단된다. 그러나 비트신호의 SNR 이 지나치게 낮고 측정에서의 높은 정밀도 유지가 불필요한 경우에는 기존의 FFT 방법이 오히려 더 좋은 성능을 보인다. 그러나 일반적으로 수위 측정 레이다에서 요구되는 높은 정밀도를 감안한다면 기존의 방법보다는 AR 방법을 적용하여야 더 신뢰성 있는 측정값들이 얻어질 수 있다.
따라서 향후 정밀 수위 측정을 위한 FMCW 레이다에 본 논문에서 분석한 AR 스펙트럼 추정 방법을 이용한 비트 주파수 추출 방식을 적용한다면 보다 더 신뢰성있고 정확한 수위측정 값들을 얻는데 큰 도움이 될 것으로 기대된다.