The performance of underwater acoustic(UWA) communication system is sensitive to the Inter-Symbol Interference(ISI) due to delay spread develop of multipath signal propagation. And due to limited frequency using acoustic wave, UWA is a low transmission rate. Thus, it is necessary technique of Space-time code, equalizer and channel code to improve transmission speed and eliminate ISI. In this paper, UWA communication system were analyzed by simulation using these techniques. In the result of simulation, the proposed Turbo Equalization method based on layered Space Time Codes has improved performance compared to conventional UWA communication.
수중통신에서의 채널의 경우 전달 과정에서 잔향 및 다중경로 등에 의해 크게 왜곡되며, 좁은 대역폭으로 인해 전송률이 낮다. 이러한 오차 유발 요인을 극복하고 높은 신뢰도 있는 통신을 하기 위해서는 채널 부호화 기술이 필수적이며 그리고 스펙트럼의 효율성을 높이고 다이버시티 및 부호화 이득을 동시에 얻으며 높은 전송 효율을 보이는 MIMO (Multiple Input Multiple Output)기술이 현재 연구 중에 있다[1, 2].
MIMO 수중통신 환경에서 다중 센서를 이용하여 다이버시티 효과 및 부호화 이득을 얻기 위해서는 시공간 부호화(space time code) 방식의 적용이 대두되고 있다. 최근 수중 통신시스템에서는 이러한 열악한 채널환경을 극복하고 전송률을 향상시키기 위하여 등화기 및 채널 부호화와 시공간 부호화 방식의 효율적인 연접 구조 기반의 MIMO시스템이 적용 및 연구되고 있다. 시공간 부호 중 다이버시티 이득과 함께 부호화 이득을 동시에 가지는 Blum에 의해 제안된 32 상태의 시공간 격자 부호화 기법을 내부 부호로 하고[3], 터보 부호[4]를 외부 부호로 구성하는 계층적 부호화 방식을 제안한다. 두 시스템의 결합 시 터보 복호기의 입력 값으로는 시공간 격자 복호기를 이용하여 연판정된 비트를 입력 값으로 필요로 한다. 그리고 터보 부호 내부에서만 이루어지는 기존의 방법과는 다르게 시공간 격자 부호의 복호 방식을 연판정 출력을 위한 BCJR(Bahl, Cocke, Jelinek and Raviv) 알고리즘[5]을 적용하여 터보 복호와 함께 전체적인 반복을 하여 성능이 향상되는 것을 시뮬레이션을 통하여 확인하였다. 또한 다중 채널 환경에서 반복 기반의 계층적 시공간 방식의 복호 구조를 등화기와 함께 효율적으로 연접하는 방안과 성능을 시뮬레이션을 통하여 분석한다. 그리고 최종적으로 계층적 시공간 부호와 반복 기반의 터보 등화기[6]의 효율적인 결합 방법 및 반복 방안을 모의실험을 이용한 성능 분석을 통하여 제안한다.
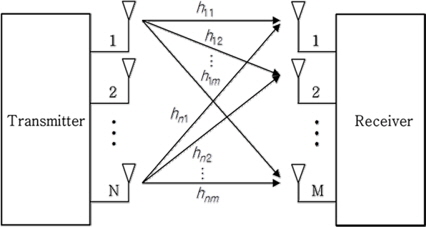
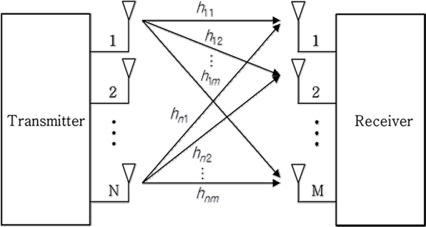
수중 채널의 다중 경로 극복을 위해서 송수신단의 다수의 센서를 이용한 다이버시티 효과를 제공하고 대역폭의 손실 없이 비부호화 시스템보다 이득을 제공하는 MIMO기술을 수중 채널 코딩 방식과 함께 접목 시켜야 한다. 수중에서의 다중 채널로 인한 왜곡된 신호를 다중 센서를 이용하여 서로 보상하며 다이버시티 이득뿐만 아니라 전송률을 향상 시킬 수 있다. 그림 1은 일반적인 MIMO 시스템 블록도이다.
이때 수신된 신호는 식 (1)과 같다.
예를 들어 송수신 각각 두 개의 센서의 MIMO 시스템에서의 수신신호는 식 (5)와 같다.
이를 행렬형태로 나타내면 식(6)과 같다.
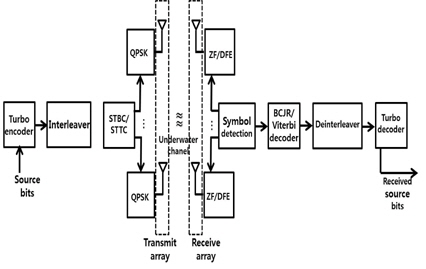
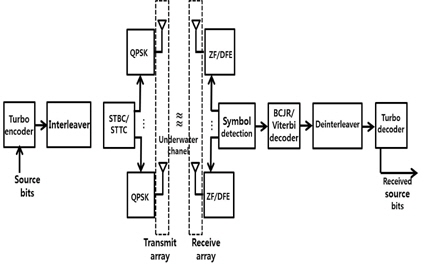
본 논문에서는 오류가 집중되어 발생할 경우 오류를 분산시키는 기능을 하는 인터리버를 외부부호와 시공간 격자 부호 사이에 첨가하여 효율적인 송신 구조를 제안한다. 또한 인터리버를 가지는 구조는 외부 부호의 오류마루 현상을 방지하는 효과도 가지고 있다. 본 논문에서 제시하는 MIMO수중채널에서 송수신단 구조는 그림 2와 같다. 외부부호로는 터보 부호를 적용시키며, 내부부호로는 시공간 부호화 방식의 구조를 제안한다.
그림 2에서 보면 시공간 부호는 크게 전송 다이버시티와 부호화 이득을 동시에 가지는 시공간 격자 부호와 부호화 이득은 없고 전송 다이버시티만 가지는 시공간 블록 부호로 나눌 수 있다[7]. 시공간 블록 부호는 부호화 이득은 없지만 최적의 다이버시티 이득과 함께 간단하게 부·복호기를 구성할 수가 있다. 하지만 열화된 성능의 복원을 필요로 하는 수중 통신에서는 부호화 이득을 가지는 시공간 격자 부호 기술이 더 적합하다. 최근 수중 통신시스템에서는 이러한 열악한 채널환경을 극복하고 전송률을 향상시키기 위하여 등화기 및 채널 부호화와 시공간 부호화 방식의 효율적인 연접 구조기반의 MIMO시스템이 적용 및 연구되고 있다[8]. 시공간 격자 부호 중 다이버시티 이득과 함께 부호화 이득을 동시에 가지는 Blum에 의해 제안된 32 상태의 시공간 격자 부호화 기법을 내부 부호로 적용하고자 한다. Blum이 제안한 32 상태의 부호화[3] 식은 아래 식 (7)과 같다.
시공간 부호화되어 전송되어진 i번째 수신센서의 수신신호
BCJR 연산에 있어 유한한 이전상태, 채널 출력, 다음상태가 존재한다. 이전 상태는
FSM은 식 (8)에 의해 로 나타낼 수 있다.
BSM은 식(8)에 의해 로 주어진다.
BM은 식 (11)과 같다.
max*는 식 (12)로 정의된다.
그림 2의 송신 구조는 터보 부호와 시공간 격자 부호 사이에 인터리버를 접목시키는 구조이며 터보 부호화를 거친 비트 스트림은 인터리버 후에 시공간 격자 부호에 입력된다. 송신된 신호는 다중경로 채널을 통과하여 수신되어진다. 수신 신호는 채널 추정과 등화기를 통하여 복원된 송신신호가 합쳐져서 BCJR 복호기로 입력되어진다. 시공간 격자 복호단에서 BCJR 복호기를 통하여 수신 비트 스트림 크기만큼의 LLR(Log Likelihood Ratio) 값이 출력된다. BCJR 의 복호 방식은 터보 부호의 복호 방식과 동일하며, 각 상태에서 ‘0’의 확률과 ‘1’의 확률을 계산하여 FSM, BSM을 계산하여 최종적으로 값을 계산한다. 추정되어진 LLR 값은 역-인터리버를 통하여 송신단에서의 인터리버 이전의 주소로 재배치하여 터보 복호기에 입력된다[4]. 이러한 반복 구조를 터보 등화 기법이라 하며, 이를 MIMO 수중통신에 제안함으로써 다중경로 채널 환경에서 전송률을 높일 수 있다.
시공간 격자 복호단에서 BCJR 복호기를 통하여 수신 비트 스트림 크기만큼의 LLR 값이 출력된다. 추정되어진 LLR 값은 역-인터리버를 통하여 송신단에서의 인터리버 이전의 주소로 재배치하여 터보 복호기에 입력된다. 일반적인 터보 복호기는 복호기 내부 반복을 통하여 성능을 향상시키는 구조이지만, 본 논문에서 제안하는 복호기 구조는 터보 복호기에서 계산되어 추정된 LLR 값을 다시 인터리버를 통하여 BCJR 복호기에 업데이트 시켜주는 방식이다. BCJR 복호기에 업데이트 되어진 LLR 값을 이용하여 BCJR 복호기에서는 새로이 추정된 BCJR LLR 값을 계산하게 된다. 추정된 BCJR LLR값은 이전에 터보 복호기의 LLR 값과의 차를 구하여 역-인터리버 후에 터보 복호기에 새로이 입력되게 된다. 따라서 전체 반복을 통하여 터보 복호기와 BCJR 복호기가 함께 업데이트 되므로 터보 복호기 내부에서만 반복을 하였을 때보다 부호화 이득이 향상된다.
MIMO 통신 기반의 다중 채널 환경인 수중 통신에서는 다중 채널로 인한 서로 독립된 다중경로를 이루고 있어 반복기반의 계층적 복호 구조를 적용하기 위해서는 등화기 기술의 적용이 필요하다. MIMO 시스템에서 적용가능한 등화기 기술로는 ZF(Zero Forcing) 검출법을 이용한 등화기와 LMS-MMSE 검출법을 이용한 등화기, LMS-DFE를 이용한 등화기 등이 있다. LMS-MMSE 등화기와 ZF 등화기는 훈련 심볼열을 이용하여 등화기의 탭 계수 값을 고정하여 사용하는 선형 등화 기법이다 [9].LMS- MMSE 등화기 보다 구조가 간단하며 복잡도가 낮은 역함수를 이용하는 ZF 등화기와 훈련 심볼열을 이용하여 먼저 등화기의 탭 계수 값을 고정하고 입력 데이터가 들어오면 결정 지향 모드로 변환하여 데이터를 이용해 채널을 추정하고 등화과정을 반복하는 비선형 등화기인 LMS-DFE 등화기[10, 11]가 더욱더 효율적일 수 있다.
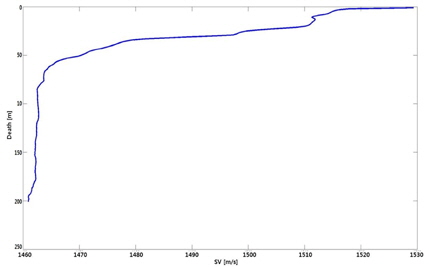
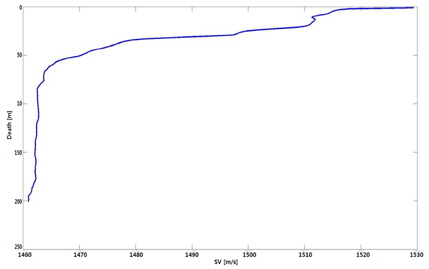
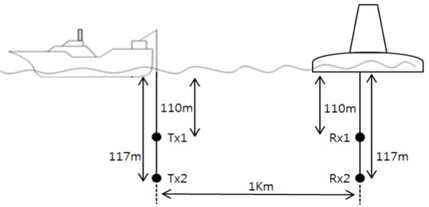
다중 채널을 가지는 MIMO 시스템에서의 등화기 성능 분석 및 반복기반의 최적의 복호 구조에 대한 성능을 분석하기 위하여 실제 동해상에서 실험을 통하여 얻은 SVP(Sound Velocity Profile)를 기초로 하여 채널을 생성한 후 모의 실험을 통하여 시뮬레이션 하였다. 실험 해역의 수심은 200 [m]이고, XBT(eXpandable Bathy Thermograph)를 이용하여 그림 3의 SVP를 구하였다.
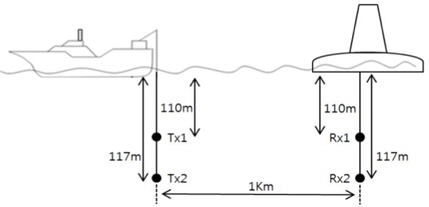
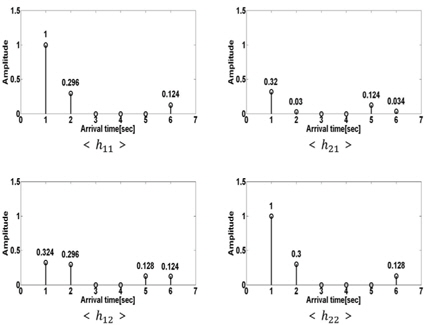
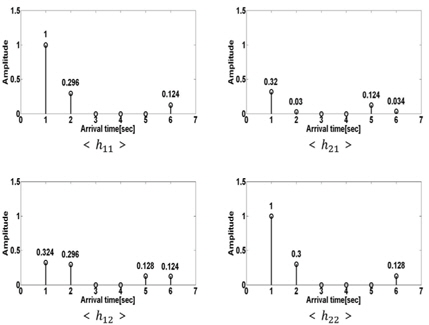
이를 바탕으로 각 채널의 전달 함수
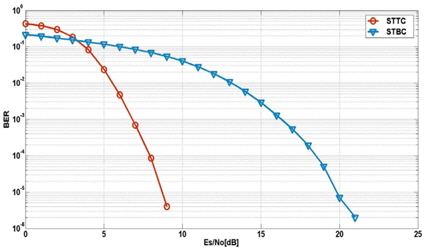
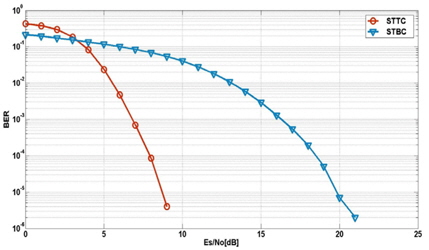
모든 시뮬레이션은 그림 5의 채널 환경을 토대로 실시하였다. 그림 6은 시공간 격자 부호와 시공간 블록 부호의 시뮬레이션 결과 성능 비교 그래프이다. 시뮬레이션에서 사용한 터보 부호화기는 전송 bit의 K=984크기, 부호화율 R=1/3을 사용하였다. 시뮬레이션 환경은 심볼 주기 T동안 서로 독립적인 분포를 가지는 다중경로 채널로써 주기 T동안 채널의 변화가 없고, 수신단에서는 채널 추정을 정확히 알고 있다고 가정하였다. 변조방식은 QPSK 변조방식을 적용하였다.
시뮬레이션 결과
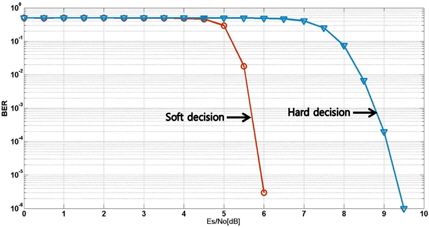
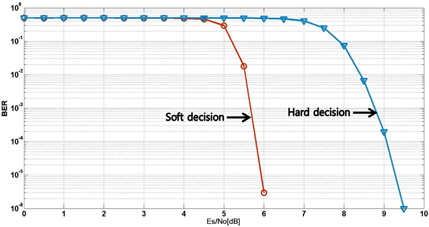
채널 등화 후의 출력 값이 시공간 격자 복호기로 입력될 때 시공간 격자 복호기에서는 일반적으로 비터비 복호 알고리즘을 사용한다. 이러한 비터비 복호 알고리즘은 수신 비트를 ‘-1’ 또는 ‘+1’로 강판정을 하여 복호 과정을 통하여 강판정된 값을 출력하게 된다. 이렇게 강판정된 값은 연판정된 입력 값을 요구하는 터보 복호기에 입력되어 성능의 열화 및 터보 호기 내에서의 반복을 통한 성능 향상을 저해하는 요소로 작용한다. 따라서 제안된 계층적 시공간 부호기의 시공간 복호에서 연판정 복호를 하기위해 BCJR 복호기를 사용한다.
시뮬레이션 결과
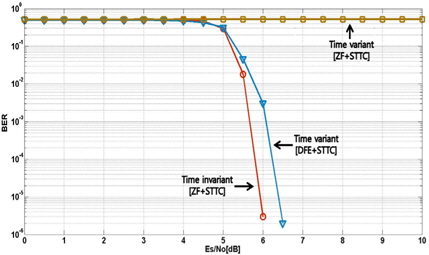
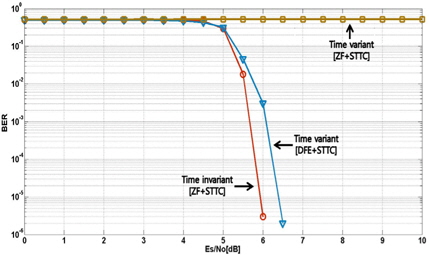
다중 채널을 가지는 MIMO 수중 환경에 적합한 등화기법을 제시하기 위하여 ZF 등화기와 LMS-DFE 등화기를 이용하였을 때의 각각의 성능을 그림 5의 채널 응답을 이용하여 시뮬레이션 하였다. 그림 8은 이에 따른 BER 성능을 나타내고 있다.
채널 부호화 이득과 함께 시공간 부호의 다이버시티 이득으로 인하여 ZF 등화기와 BCJR 복호기를 이용하는 계층적 시공간 부호를 이용한 구조에서는 BER 10−4을 기준으로
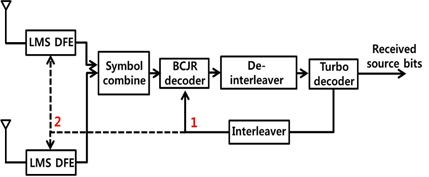
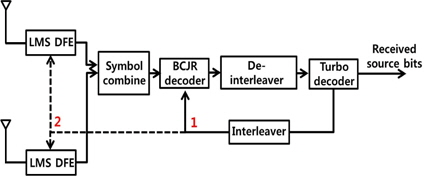
MIMO 수중 통신에서 효율적인 통신 시스템을 위해서는 제안된 계층적 시공간 부호에서 BCJR 알고리즘 복호 방안 및 LMS-DFE 등화기의 구조가 적합하다. 따라서 본 논문에서는 그림 2에서의 일반적인 복호기 구조가 아닌 계층적 시공간 부호안에서의 연판정된 출력값을 이용한 효율적인 반복 복호 구조를 제안한다. 그림 9는 제안하는 반복 복호 기반의 최적의 복호 구조를 나타내고 있다.
일반적으로 연구되어져 있는 LMS-DFE 등화기와 시공간 부호간의 반복을 통한 복호 방법은 그림 9에서의 2번과 같은 Outer iteration 방법으로써 LMS-DFE 등화기와 시공간 격자 복호 방법으로 비터비 알고리즘으로 사용되고 있다. 본 논문에서 제안하는 반복 복호 구조는 시공간 격자 복호기로 BCJR 알고리즘을 이용하여 LMS-DFE 등화기와의 반복이 아닌 터보 부호와의 반복을 통하여 채널 부호 이득을 향상 시킬 수 있는 1번과 같은 Inner iteration을 이용하는 방법을 제안한다.
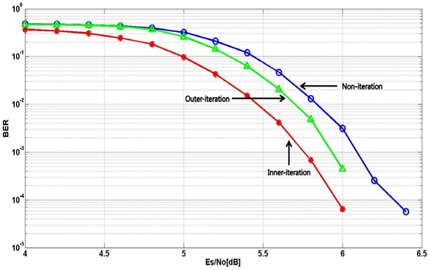
본 논문에서 제안한 Inner iteration을 통한 성능의 향상을 검정하기 위하여 그림 5의 채널 응답을 이용하여 모의실험을 통하여 BER 성능을 시뮬레이션 하였다. 그림 10은 제안하는 Inner iteration 복호에 따른 성능 및 일반적인 Outer iteration 복호에 따른 성능을 나타내고 있다.
시뮬레이션 결과 효율적인 반복을 통한 복호 구조에 따른 성능이 반복이 없는 복호 구조 보다 향상됨을 알 수 있다. 또한 반복 방안으로 제안한 Inner iteration을 이용한 터보 부호와 BCJR 알고리즘을 이용한 시공간 격자 복호 이용하였을 때의 성능이 일반적인 LMS-DFE 등화기와 시공간 격자 복호 방법으로 비터비 알고리즘으로 사용하여 Outer iteration을 이용한 반복 보다 낮은
본 논문에서는 MIMO수중 통신시스템에서 열악한 채널환경을 극복하고 전송률을 향상시키기 위하여 등화기 및 채널 부호화와 시공간 부호화 방식의 효율적인 연접 구조기반의 복호구조를 연구하였다. 외부 부호로는 터보 부호를 고정하여 시공간 부호화 방식을 내부 부호로 그리고 수신단에서 효율적인 반복모델을 제시하기 위해 다양한 방식별로 시뮬레이션 하여 최적의 모델을 제시하였다. 시공간 부호화 방식을 정하기 위하여 시공간 블록 부호와 시공간 격자부호의 성능을 시뮬레이션한 결과
최종적으로 MIMO 수중 통신 기반의 효율적인 전송기법의 구조로는 LMS-DFE 등화기와 함께 시공간 격자 부호, 그리고 터보 부호를 연접하였을 때 최적의 성능을 보이는 것을 알 수 있었고, 또한 MIMO 시스템에서의 최적의 반복 구조는 제안된 시공간 격자 부호와 터보 부호간의 Inner iteration 복호 구조가 적합함을 알 수 있었다.