According to advance of radar technology and increase of air threat, 3D surveillance radars are preferred as shipboard equipments to shorten reaction time. In this paper, reaction time against air target was calculated by simulation in each case, 2D and 3D surveillance radar and it was suggested that a few parameters including purpose of warships, performance of shipboard equipments, threat of surrounding countries and budget to select the reasonable type of radar.
과학기술의 발전으로 다양한 함정 탑재 센서가 개발되고 있지만, 레이더는 운용하는데 기상의 영향이 적고, 신뢰성이 높아 표적획득을 위해 가장 중요한 센서로 사용되고 있다[1]. 특히 2차 세계대전 이후 항공기와 대함 유도무기의 비약적인 발전으로 장거리 탐지레이더를 이용하여 원거리에서 대공 표적을 탐지하고, 대응시간을 확보하는 것이 함 생존성 향상 차원에서 매우 중요한 요소가 되고 있다.
함정에서는 원거리 조기 경보를 위한 탐색레이더와 정확한 사격제원 산출을 위한 추적레이더 또는 전자광학 추적장치 등을 운용하고 있다.
주로 전방위 감시를 하는 탐색레이더는 최신형 위상배열레이더를 제외하고는 대부분 기계식 회전 안테나를 통해 표적 정보를 업데이트 하고, 추적레이더나 전자광학 추적장치의 경우 할당된 표적에 대해서 지속적으로 표적 정보를 업데이트 한다. 표적의 속력이 상대적으로 느리고 고도 정보가 불필요한 대함 표적은 탐색레이더를 이용한 TWS (Track-While-Scan) 방식으로도 사격문제 해결이 가능하지만, 대공표적의 경우 방위/거리/고도/상대속력 등의 정보를 정확히 알아야 사격문제 해결이 가능하므로[2] 추적레이더 또는 전자광학 추적장치 등을 이용해야만 한다.
3차원 탐색레이더는 탐색레이더의 표적을 추적레이더로 인계할 때 표적의 방위/거리 정보는 물론 고도 정보를 사전에 공유하므로 이론적으로 추적레이더에서 신속히 표적을 획득할 수 있다는 장점이 있다. 이러한 이유로 여러 나라의 해군들은 표적의 방위 및 고도 정보를 동시에 획득 가능한 3차원 탐색레이더의 탑재를 선호하고 있다. 경제적 여건이 열악한 개발도상국에서도 신형 함정을 확보하고자 할 때 막연히 3차원 탐색레이더만을 선호하는 경우가 있으나, 비용 대비 얼마나 효과도가 있는지에 대해서는 납득할 만한 데이터가 부족한 것이 현실이다.
본 논문에서는 함정 탑재 탐색레이더가 2차원일 경우와 3차원일 경우 각각 추적레이더로 대공 표적을 인계하는데 소요되는 시간을 비교하고, 표적 인계에 소요되는 시간 이외에도 함정 탑재 레이더를 선택하기 위해 중점적으로 고려해야 할 요소에 대해 제시하였다.
전투 및 전투지원을 목적으로 하는 함정에서 운용하는 레이더는 크게 탐색레이더와 추적레이더로 구분할 수 있다. 탐색레이더는 전 방위 표적에 대해 원거리 조기 탐지를 목적으로 하므로 좁은 수평 빔 폭과 상대적으로 넓은 수직 빔 폭, 즉 fan 형태의 빔을 360도 회전하는 방식으로 운용된다. 사격 통제용으로 사용되는 추적 레이더는 정밀도 보장을 위해 수직 빔 폭과 수평 빔 폭이 모두 좁은 pencil beam 형태의 빔 패턴을 사용한다. 서론에서 언급한 바와 같이 대함 표적은 고도정보가 필요 없고, 표적이 비교적 크며, 속력이 느리기 때문에 탐색레이더 자체의 추적 기능, 즉 TWS 추적으로 사격문제 해결이 가능하다. 그러나 대공표적의 경우 속력이 빠르고, 정확한 고도를 파악해야만 사격문제를 해결할 수 있으므로 별도의 추적레이더나 전자광학장치를 이용하여 표적에 대해 지속적으로 업데이트를 하여야한다. 미국의 AN/SPY-1이나 유럽의 APAR와 같이 탐색/추적을 동시에 수행하는 위상배열레이더를 탑재한 함정을 제외하면 대공전을 수행하는 모든 함정에는 탐색레이더와 함께 별도의 추적장치를 보유하고 있다.
탐색레이더로 획득한 표적은 신뢰도 높은 사격 문제해결을 위해 추적레이더로 표적을 인계한다.
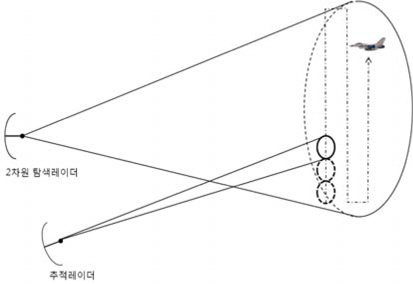
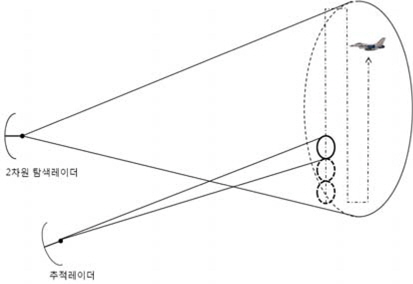
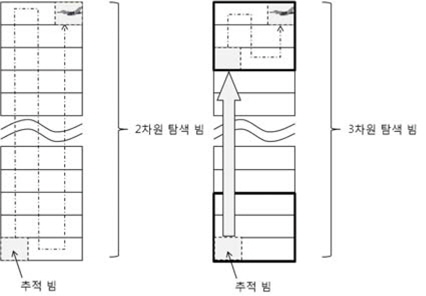
2차원 탐색레이더의 경우 표적의 고도를 알 수 없기 때문에 추적레이더는 표적이 있는 방위각의 빔 폭 내에서 nodding-beam scan(고각 방향의 raster scan)을 통해 표적을 탐색한다.[3]
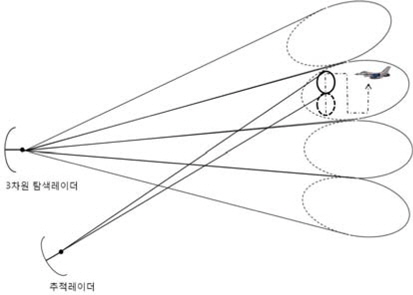
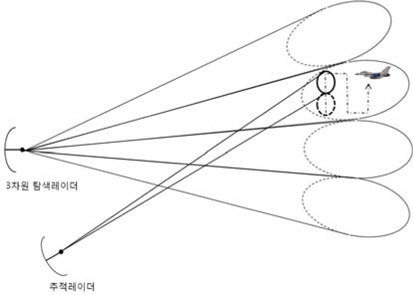
3차원 탐색레이더는 고각 방향의 다중 빔 또는 단일 빔 스캔을 통해 표적의 고도 정보를 개략적으로 알고 있기 때문에 추적레이더의 최초 추적 위치를 표적에 더 가까이 위치시킬 수 있다. 따라서 이론적으로 3차원 탐색레이더가 탑재된 함정은 2차원 탐색레이더를 탑재한 함정보다 대공 표적 인계에 소요되는 시간이 단축된다.
우리 해군에서 운용하는 함정 중 FF, PCC 등 1990년대 초까지 도입된 전투함에는 2차원 탐색레이더가, DDH 등 1990년대 중반 이후 도입된 대공전을 수행하는 전투함에는 3차원 탐색레이더가 탑재되어 있다.
탐색레이더 및 추적레이더의 성능은 다음과 같이 간략화 하여 모델링 하였다.
• 2차원 탐색레이더
- 수직 빔폭 : 69° - 수평 빔폭 : 3°
• 3차원 탐색레이더
- 수직 빔폭 : 69°(3°×23개 수직 빔) - 수평 빔폭 : 3°
• 추적레이더
- 수직/수평 빔폭 : 1° - Slew rate : 150°/s
추적레이더의 x-y축 기동 속도인 slew rate은 Sting EO Mk2(Thales Netherlands 社)의 성능을 참고하여 간략화 하였다.(수평 : 2.7 rad/s, 수직 : 2.5rad/s)
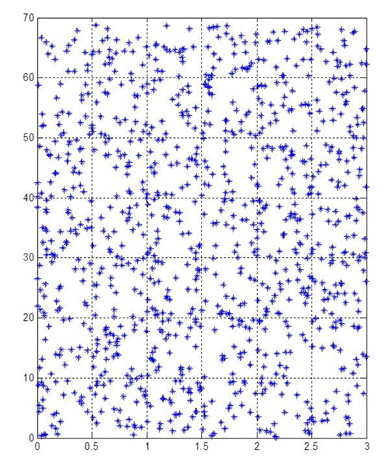
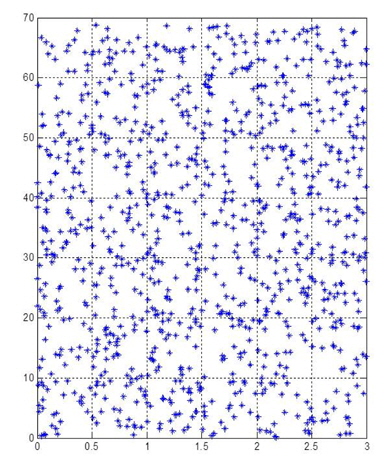
표적은 주어진 탐색 빔 범위에 무작위로 생성되도록 하였고, 생성된 표적을 추적레이더로 탐지하는 시간을 산출하였다. 그림3은 표적을 1000회 생성하여 플로팅한 예이다.
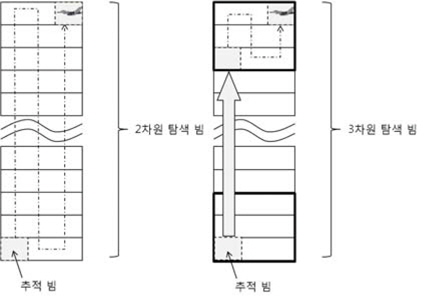
2차원 탐색레이더의 경우 그림4 좌측과 같이 획득한 표적을 추적레이더로 인계하기 위해 추적레이더는 항상 탐색 빔 좌측 하단에서부터 1° 단위로 위쪽 방향으로 스캔하도록 하였다. 3차원 탐색레이더의 경우에는 3° 단위로 고각 정보가 있으므로 그림4 우측과 같이 표적이 위치한 탐색 빔의 좌측 하단으로 추적 빔을 곧바로 위치 시킨 후 스캔을 시작한다.
본 실험 모델은 오직 탐색 빔 내에서 추적 빔이 표적을 최초 탐색하는 시간을 산출하는 것에만 초점을 두었다. 따라서 탐색레이더의 회전에 따른 표적 소실/재접촉에 의한 표적 위치의 변화율은 고려하지 않았다. 또한 추적 빔이 표적에 도달하는 즉시 탐지 되는 것(Pd =1)으로 가정하였다.
탐색 빔은 207개의 추적 빔으로 나눌 수 있다. 따라서 2차원 탐색 빔에서 추적 빔으로 인계할 때 산술적인 최대 소요시간은 1.38초이다. 3차원 탐색 빔은 3도 단위로 셀이 구분되어 있으므로, 셀 내에서 최대 추적 시간은 0.06초이고, 최대 고각 셀의 우측 상단 끝에 표적이 위치할 경우 추적 빔을 최대 고각 셀 좌측 하단 끝에 위치시키는데 소요되는 시간 0.44초를 더하여 0.5초가 된다.
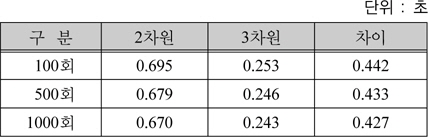
실험 모델을 100회, 500회, 1000회 반복하여 탐색 빔 내에서 추적 빔이 표적에 도달하는데 소요되는 시간을 계산한 결과는 표1과 같다.
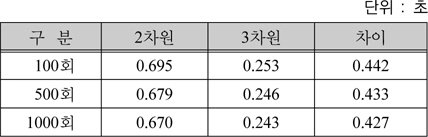
표적 인계 평균 소요 시간
실험회수 증가에 따른 표적인계 소요시간의 변동 폭은 크지 않았다. 2차원 탐색 빔과 3차원 탐색 빔 간 표적인계에 소요되는 시간의 차이는 최대 0.873초, 평균 0.43초로 나타났다.
실험결과 수직 빔폭이 70°인 2차원 탐색레이더와 3차원 탐색레이더 간 대응시간의 차이는 최대 1.38초에 불과하였다. 물론 본 실험에서는 표적의 고속 기동, 함정의 기동, 요동 , 표적의 종류(항공기, 대함미사일), 표적의 고도 및 기동 특성(중/고고도, Sea skimming) 등 탐지 확률의 저하 요소는 반영하지 않은 이상적인 상황만을 고려하였다는 제한사항이 존재한다. 다만 우리해군에서 오랜 기간 운용 중인 FF/PCC 사격통제장비에서도 2차원 탐색레이더에서 탐지한 표적이 수초 이내에 추적레이더로 인계가 되고 있다는 점은 주목할만 하다.
3차원 탐색레이더는 2차원 탐색레이더에 비해 많은 장점이 있으나 상대적으로 고가인 경우가 많고, 대함용으로는 성능의 차이를 기대하기 어렵다. 따라서 탐색레이더의 종류를 선택할 때 다음과 같은 사항을 고려하여야한다.
• 함정의 임무
- 대공 감시 및 전파(데이터 링크) 임무 수행 유무 - 항공기 유도 임무 수행 유무
• 탑재 센서 및 무장의 성능
- 탐색 및 추적센서의 탐지거리/빔 패턴 - 대공 유도무기체계의 사거리 - 자함방어/구역방어/전구 대공방어 여부
• 주변국 위협 세력
- 위협 세력과의 거리 - 적성 세력의 주요 위협 수단
• 가용 예산
적성국가와 인접하여 대치하고 있는 우리 해군은 대공표적 대응시간의 단축은 함 생존성 차원에서 무엇보다 중요한 변수이고, 이러한 이유에서 PKG, FFX 등 근래에 건조되는 전투함들은 모두 3차원 탐색레이더를 보유하고 있다.
그러나 예를 들어 필리핀은 우리나라와 달리 모든 위협세력이 수평선 너머에서부터 접근할 수 밖에 없으므로 대응시간이 상대적으로 여유가 있어 경우에 따라서는 2차원 레이더와 3차원 레이더간 생존성의 차이가 없을 수 도 있다.
향후 위에서 제시한 요소들은 물론 개별 탑재 장비의 성능과 운용개념까지 가중치를 반영하여 경제적이면서도 생존성을 극대화 할 수 있는 함정을 디자인할 수 있는 모델을 연구할 필요가 있다.