The acoustic vector sensor (AVS), which measures the acoustic pressure and particle velocity simultaneously at a single point, has existed for over a century (Jia, 2009), recent advances in vector senor design have improved their utility in real engineering application (Rouquette, 2007; Lockwood and Jones, 2006; Ma et al., 2011). The AVS is advantageous for azimuth-elevation direction finding, because of the following two properties: (i) A single AVS intrinsically possesses a two-dimensional azimuth-elevation directivity; (ii) The steering vector of AVS is independent of the source’s frequency (Wu et al., 2010; Tam and Wong, 2009).
The ideal AVS and AVS array, which may be not affected by any unkown nonideality in the AVS’s amplitude response, phase response, collocation, or orthogonal orientation among its constituent velocity sensors, have been introduced and further studied by many researchers. The measurement model of the AVS array has been presented and the theoretical performance bounds on the direction finding based on AVS array has been analyzed (Nehorai and Paldi, 1994). Then, the direction finding algorithms that utilize the AVS’s unique array manifold have been developed, such as beamforming-based (Hawkes and Nehorai, 1998), MUSIC-based (Wong and Zoltowski, 2000), ESPRIT-based (Xu et al., 2007; Wang et al., 2013), and beamspace-based DOA estimation methods (Chen and Zhao, 2004). Tam and Wong (2009) and Yuan (2012) have studied how these various unknown nonidealities degrade direction finding accuracy via cramer-rao bound analysis. All above mathematical analysis and algorithms are based on the far-field measurement model, the near-field measurement model was investigated recently (Wu et al., 2010; Jacobsen and Liu, 2005). Zhou and Nehorai presented a novel approach for low frequency DOA estimation using miniature circular vector sensor array mounted on the perimeter of a cylinder (Zhou and Nehorai, 2009).
There are usually two types of acoustic vector sensors in the real engineering application, the resonant vector sensor which directly measures the particle velocity and the APGVS (Nehorai and Paldi, 1994). The APGVS is insensitive to mechanical disturbances and convenient to be installed, thus it has been used in sonarbuoy, submerged buoy and ultra-short baseline acoustic positioning systems (Chen, 2007; Wan et al., 2006). The APGVS must meet the approximation precondition (
This paper is organized as follows: Section 1 is the introduction, section 2 and section 3 analyze the measurement model and measurement errors of the APGVS, respectively. Section 4 analyzes several DOA estimation methods based on single APGVS and presents two modified processing methods to increase the robustness of DOA estimation based single APGVS. To evaluate the performance of the modified DOA estimation methods, numerical simulation is conducted in section 5, and on-site trial and the associated data analysis in section 6. Finally, a conclusion is drawn in section 7.
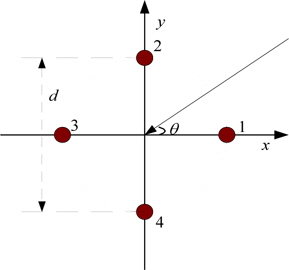
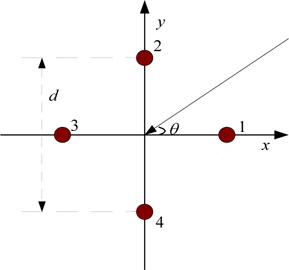
The two-dimensional APGVS is composed of four pressure sensors, whose structure can be demonstrated in Fig. 1. The acoustic pressure of the four sensors referring to the original point (the central point of the APGVS) can be denoted as

where
Generally, the pressure of the APGVS is estimated by averaging the receiving signal of the four pressure sensors. Regardless of the system noise and ambient noise, the acoustic output pressure of the APGVS can be written as

when

It can be observed from (3) that when
The particle velocity components are usually obtained by finite difference of the pressure signal of these sensors on the same axis. Thus, the particle velocity components of the central point of the APGVS can be written as


where


Combining (3), (6) and (7), we can obtain a vector pattern as shown in (8) regardless of the normalization of amplitudes,

where denotes the acoustic pressure wave in the central point of the APGVS.
The APGVS did not measure acoustic pressure and particle velocity directly at a collocated point. The acoustic pressure was estimated by averaging the signals of the four pressure sensors, and the particle velocity components were estimated using pressure gradient of these sensors. Thus, the APVS has, to some degree, average and finite-difference approximation errors.
>
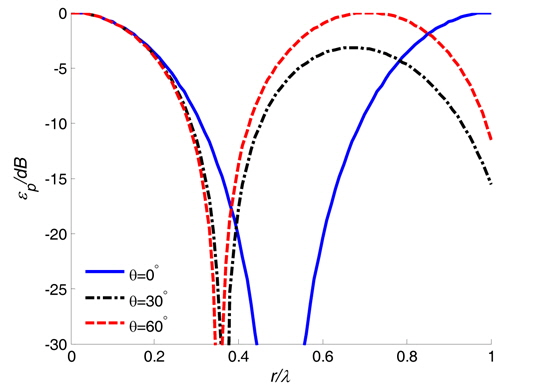
Acoustic pressure measurement error
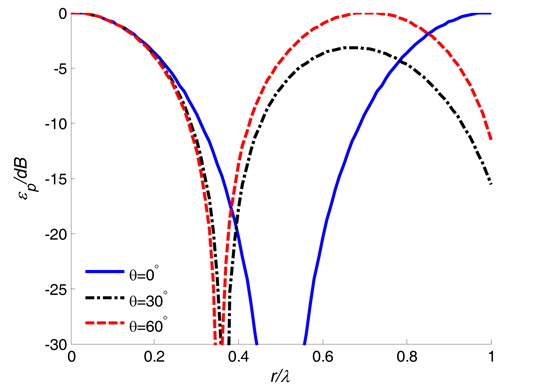
The acoustic pressure error can be evaluated by the ratio of estimated value to real value of the acoustic pressure. Frequently, we express the acoustic pressure error in dB and refer to it as “measurement error index” (Yang et al., 2013). Formulas (2) is the estimated value of the APGVS acoustic pressure, thus the measurement error index of the APGVS acoustic pressure will be

where

>
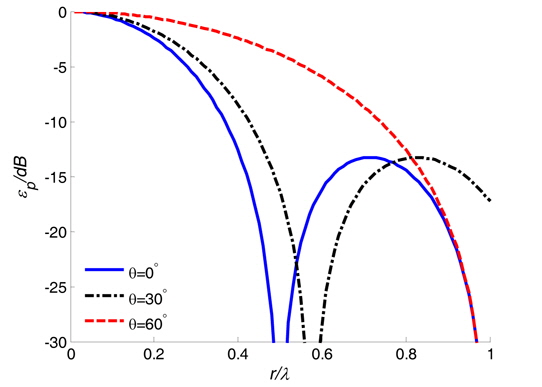
Particle velocity measurement errors
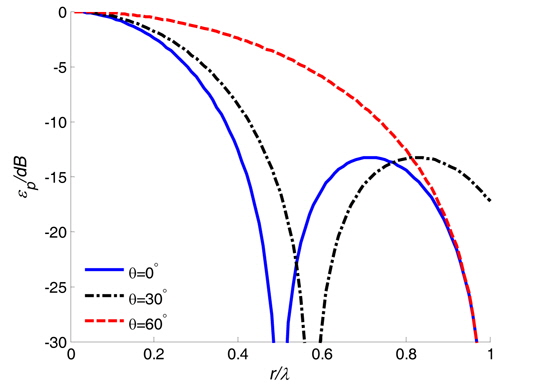
The particle velocity measurement errors index is similar to that of the acoustic pressure. The (4) and (5) are finite-difference approximation values of the two components of the APGVS’s particle velocity at central point. Considering the compensation of amplitude of particle velocity, two kinds of measurement error indexes of the particle velocity can be written as


where

In summary, if the acoustic pressure measurement error and particle velocity errors are not bigger than 1

where
DOA ESTIMATION METHODS BASED ON SINGLE APGVS
Assuming the incident signal of targets and ambient noise received by the APGVS are uncorrelated, and from (8), the average acoustic intensity components can be written as

where

where is the azimuth estimation value of the incident wave.
The DOA estimation method aforementioned is usually referred to as “average acoustic intensity (AAI) method”. If there are multi-targets around the APGVS, the AAI method becomes ineffective, but we can utilize the difference of the incident signal spectra to distinguish them. We denote the Fourier transform of the three channels signals of the APGVS by

where the superscript * represents conjugate.
The ocean acoustic channel approximately meets the acoustic Ohm’s law, and acoustic pressure and particle velocity have the same phase. According to the properties of the Fourier transform, the azimuths of incident waves can be estimated by

where 〈⋅〉 represents moving average periodogram operator and Re{ } denotes the real value part of the entity inside{⋅} . The DOA estimation method denoted by (18) is usually referred to as “conjugate acoustic intensity (CAI) method”, which has better performance than AAI method in target detection, DOA estimation, multiple targets resolution, etc.
>
Optimization for acoustic intensity methods
As the working frequency increases, it is increasingly difficult to meet the approximation precondition for the APGVS. To expand APGVS working frequency band and increase its application range, we must find new processing approaches to improve APGVS working performance (Chen, 2007).
For notational simplicity, we will omit explicit dependence on


This can be put in more distinct form by simple deformation, and then we can get

Let

According to the relation of the trigonometric, the azimuth can be estimated by

To distinguish this approach from acoustic intensity method, it can be called “modified acoustic intensity (MAI) method”.
The minimum variance distortionless response (MVDR) beamforming of single APGVE is an extension of MVDR beamforming of array with multiple elements. We process the received signal

where

where
Solving equations set (24) by using a Lagrange multiplier, and the optimal weight factor

Substituting (26) into (24), we can obtain

where
>
Optimization for MVDR beamforming method
When the radius of APGVS does not meet the approximation precondition in (14), the estimation performance of VMVDR of APGVS will degrade significantly. The main reason is the approximation error of steering vector.
From (2), (4) and (5), the accurate output of the APGVS can be written as

where is noise vector, and is accurate steering vector of the APGVS, which can be written as

The accurate steering vector is dependent on radius of the APGVS, so it has no approximation error with respect to radius variation of the APGVS. If we replace in (29) with

The steering vector is accurate, thus the output spatial spectra have no approximation errors. So the estimation performance of the estimator defined in (30) won’t degrade with increase of the radius of the APGVS. In order to distinguish the process defined in (30) from VMVDR, this processing approach is referred to as “modified MVDR beamforming method” of the APGVS (MVMVDR).
SIMULATION AND RESULTS ANALYSIS
In this section, we present some experiments to evaluate the estimation performance of the aforementioned four processing methods. The incident wave is the CW pulse with central frequency 7
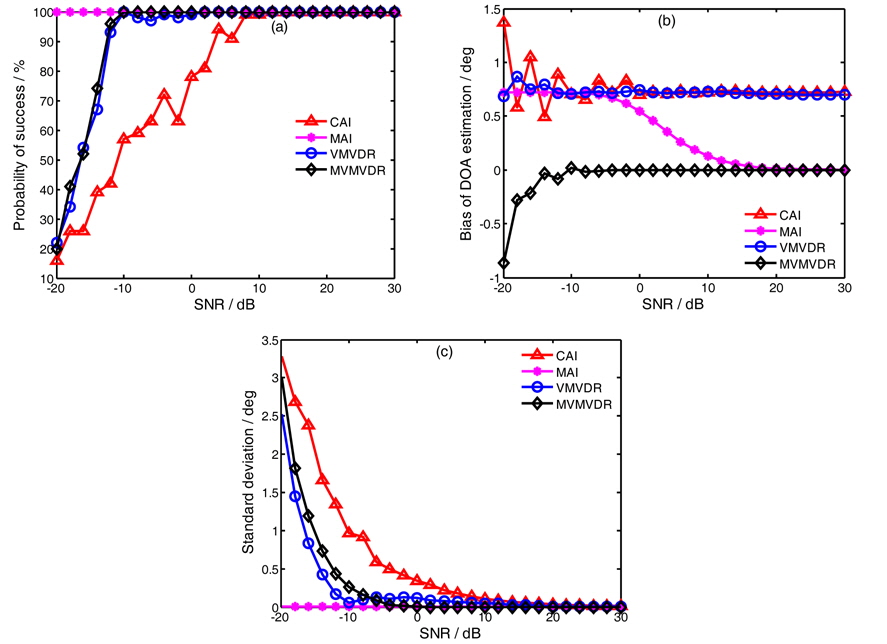
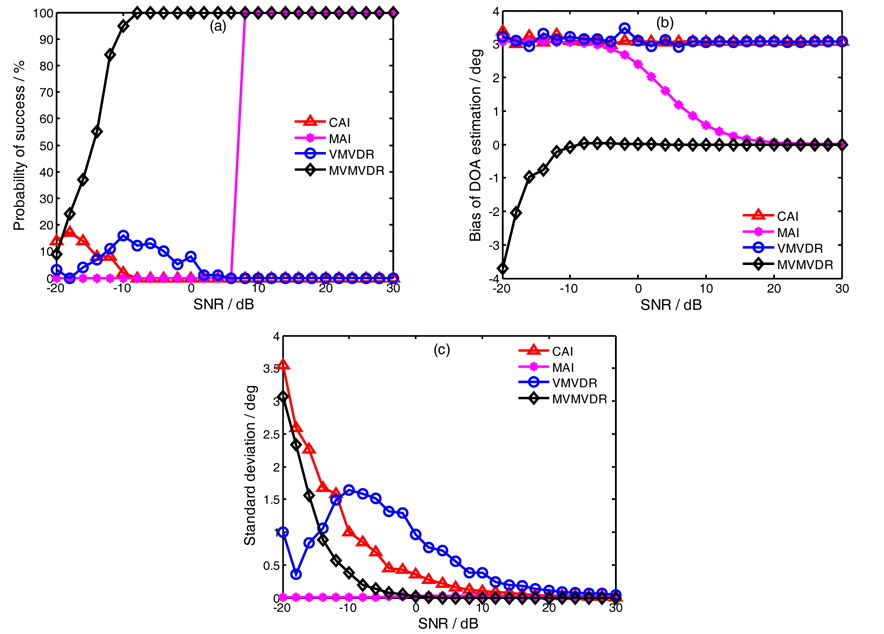
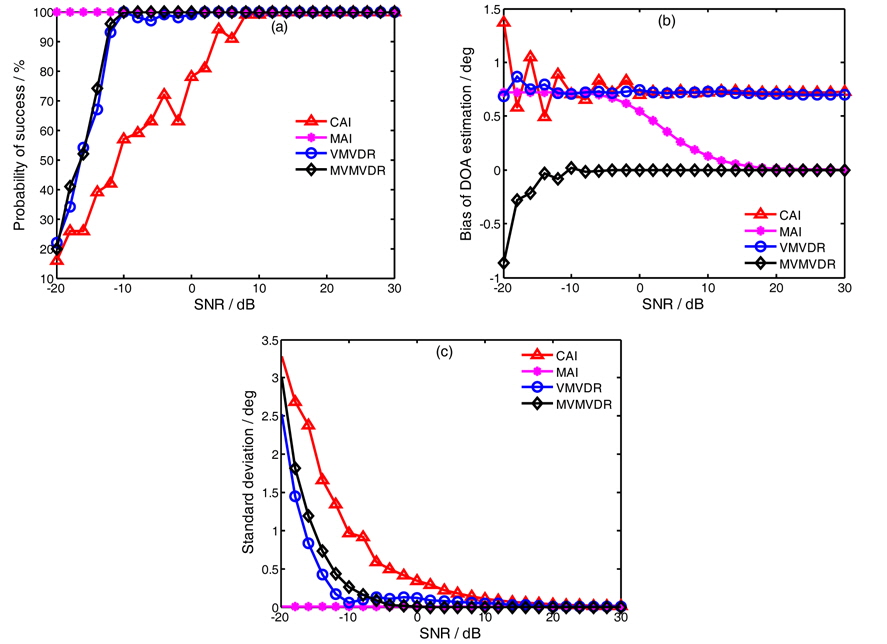
Fig. 4 shows the estimation performance of the four processing methods with the radius
(1) Under the condition of 1° error limit, the probability of success reaches 100% when the input SNR of CAI, MAI, VMVDR and MVMVDR methods is bigger than 10dB, −20dB, 2dB, −10dB, respectively. Thus the order is CAI>VMVDR> MVMVDR>MAI for input SNR threshold of four processing methods. (2) The DOA estimation bias of CAI and VMVDR methods is about 0.73° , and there is no bias for the MAI and the MVMVDR methods when their input SNR is bigger than 20dB and −8dB, respectively. (3) The standard deviation of the MAI and the MVMVDR methods are lower than the CAI and the VMVDR methods, respectively.
From Fig. 4, we can find that the two modified processing methods have better DOA estimation performance when the radius of the APGVS meets the approximation precondition denoted in (14).
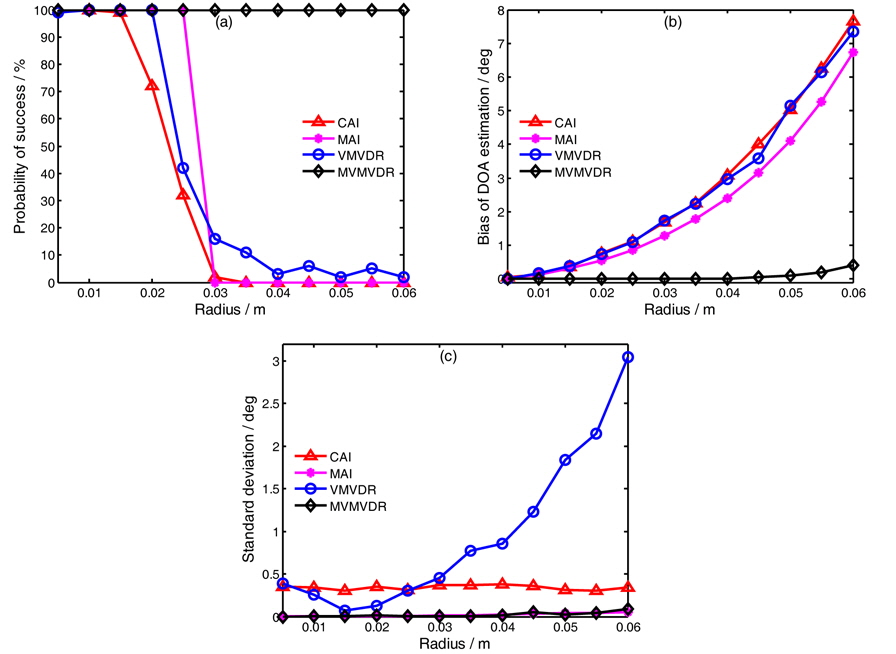
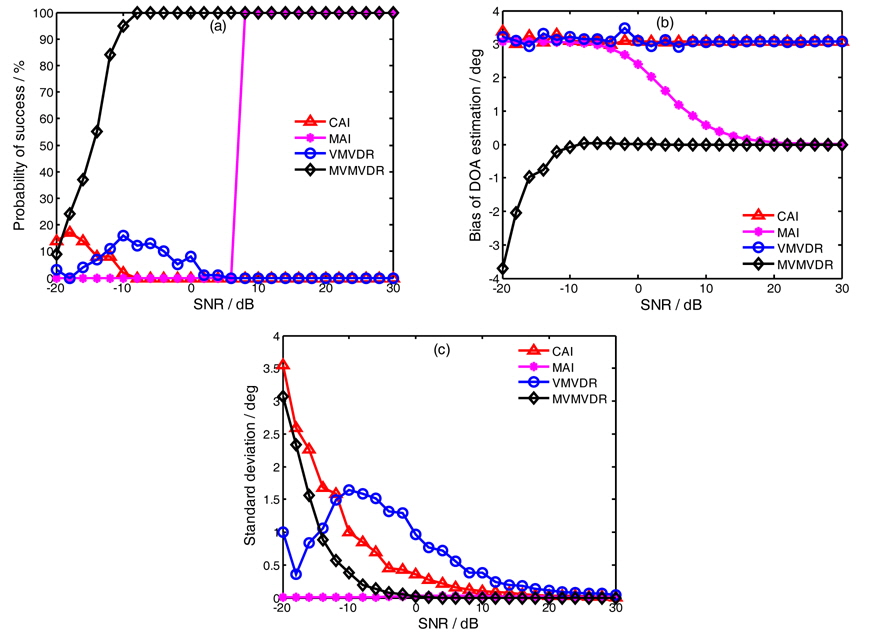
Fig. 5 shows the estimation performance of the four processing methods with the radius
(1) Under the condition of 1° error limit, the probability of success of MAI and MVMVDR methods reaches 100% when the input SNR meets SNR≥8dB and SNR≥−8dB, respectively. The CAI and VMVDR methods don’t correctly estimate the target azimuth under this condition. (2) MAI and MVMVDR methods are unbiased when the input SNR meets SNR≥−8dB and SNR≥20dB, respectively. The bias of the CAI and VMVDR methods increases to about 3.1°. (3) The standard deviation of the MVMVDR method is lower than that of the MAI method. (4) When the MAI and MVMVDR method reach unbiased estimation, their input SNR threshold is the same as in Fig. 4, respectively.
From Fig. 5, we can find that the two modified processing methods can still correctly estimate the target azimuth when the radius of APGVS does not meet approximation precondition. The MVMVDR method works better than the MAI method by about 20
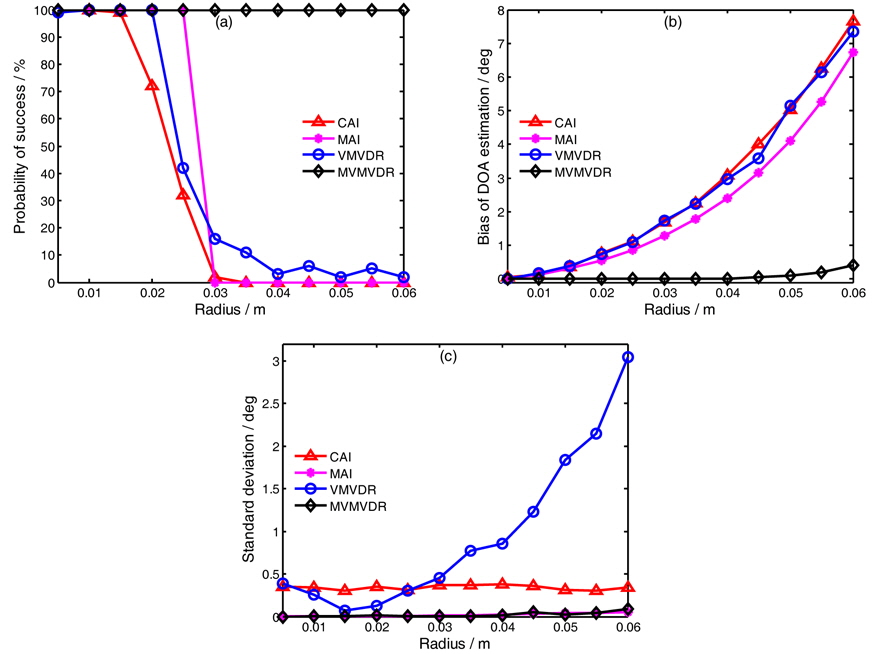
Fig. 6 studies the DOA estimation performance with different radiuses of four processing methods when the input SNR is 0
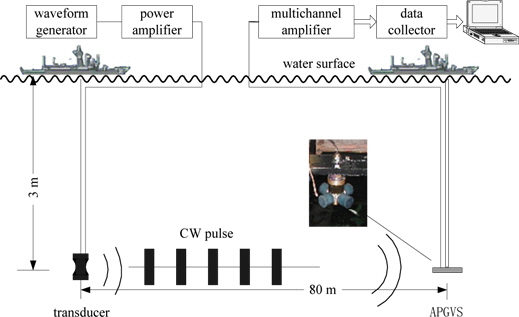
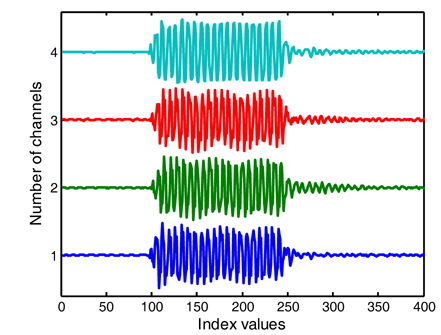
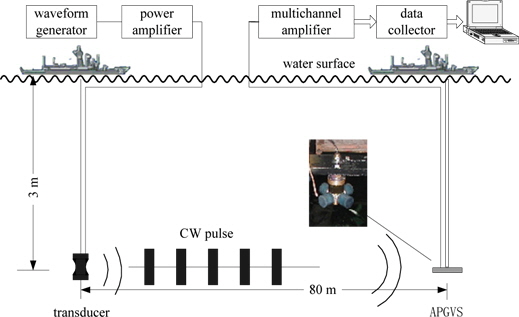
The proposed modified processing methods are applied to real underwater acoustic data collected by actual APGVS in lake water. The practical lake trial system was designed as shown in Fig. 7. The APGVS with radius 0.04
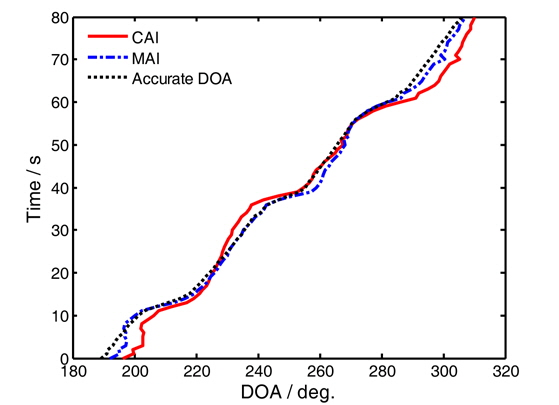
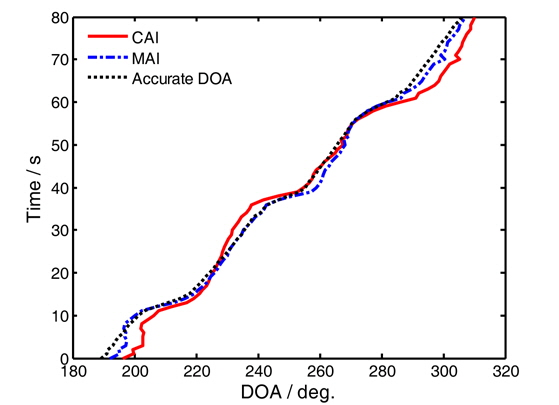
Fig. 9 shows the time-bearing display of the trial data by the CAI and the MAI methods. The ‘Accurate DOA’ in Fig. 9 is the estimation of the DOA using the data of an APGVS array, which can be regarded as the practical azimuth of the incident wave. The results are given by three curves, the solid and dashdotted curve represent the DOA estimation of the CAI and MAI methods, respectively, and the dotted curve denotes the real azimuth. From the results of 80
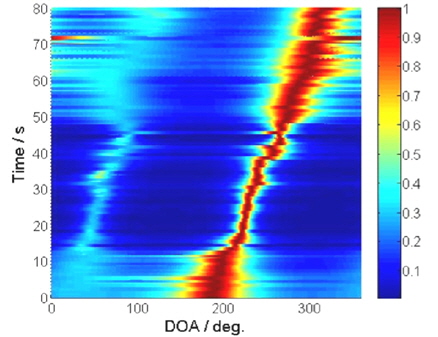
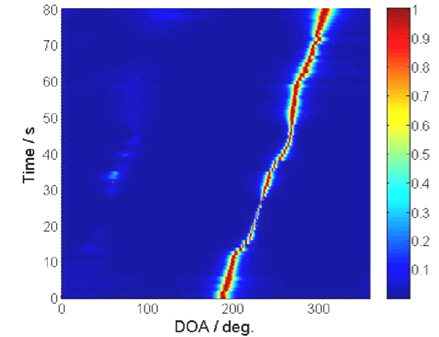
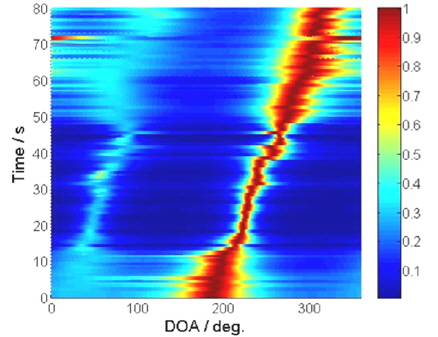
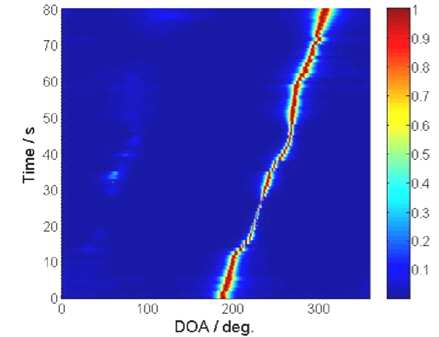
Results of the VMVDR and MVMVDR methods are shown in Fig. 10 and in Fig. 11, respectively. The two processing methods estimate the azimuth of incident wave by searching the maximum of the spatial spectra, thus the results are given in the form of time-bearing spectra surface. Comparing the results of the two processing methods in Fig. 10 and in Fig. 11, we can find that the trace of the MVMVDR method is narrower and clearer than that of the VMVDR method. The trial results are quite similar to the simulation results described in the former section, which indicates that the MVMVDR method is effective when the radius of APGVS does not meet the approximation precondition expressed in (14).
In this paper, the measurement model and the measurement errors of the APGVS are introduced, and several DOA estimation methods are analyzed. In real engineering application, the radius to wavelength ratio must meet 0≤