TCAS is designed to prevent mid-air collisions between aircraft. However, the current version of TCAS does not perform a perfect role of aircraft collision detection and avoidance, hence mid-air collisions and near misses do occasionally occur [1].
The importance of aircraft collision detection and avoidance will increase, as the demand in air traffic is projected to grow continuously. In response to the growth in air traffic demand, the Joint Planning and Development Office (JPDO) of the United States has initiated a revolutionary concept of operation, known as the Next Generation Air Transportation System (NextGen), for future air traffic operations [2]. Under the NextGen, a new concept of operation allows aircraft more flexibility in changing its flight conditions, and a part of separation responsibility is sometimes delegated to individual aircraft. As a result, the aircraft’s ability for collision avoidance including TCAS should be further emphasized.
Intensive researches on collision detection and avoidance systems have been performed in the last few decades [3-8]. Prandini et al. have used a stochastic kinematic model of aircraft, with uncertainties represented by two-dimensional Brownian motion for short-term trajectory prediction [3]. Hwang et al. have proposed a probabilistic trajectory prediction algorithm, using a hybrid system aircraft dynamics model that allows various turn dynamics of aircraft to be considered, and therefore more accurate trajectory prediction and conflict detection have become possible [4]. Trapani et al. have also suggested a horizontal resolution algorithm for aircraft collision avoidance by including the bank turn dynamics of aircraft [5]. The performance of various collision avoidance algorithms have also been investigated [6-7]. More comprehensive survey on collision modeling and avoidance algorithms is provided in the reference [8].
In this paper, we introduce a new collision resolution algorithm, which includes both vertical and horizontal maneuvers of aircraft. The algorithm is considered to be the combination of vertical resolution advisory in TCAS, and horizontal resolution with the dynamics of the aircraft’s bank turn. The probabilistic collision detection algorithm is also incorporated, and the performances of the proposed method were compared with those of the current TCAS vertical only algorithm in various situations.
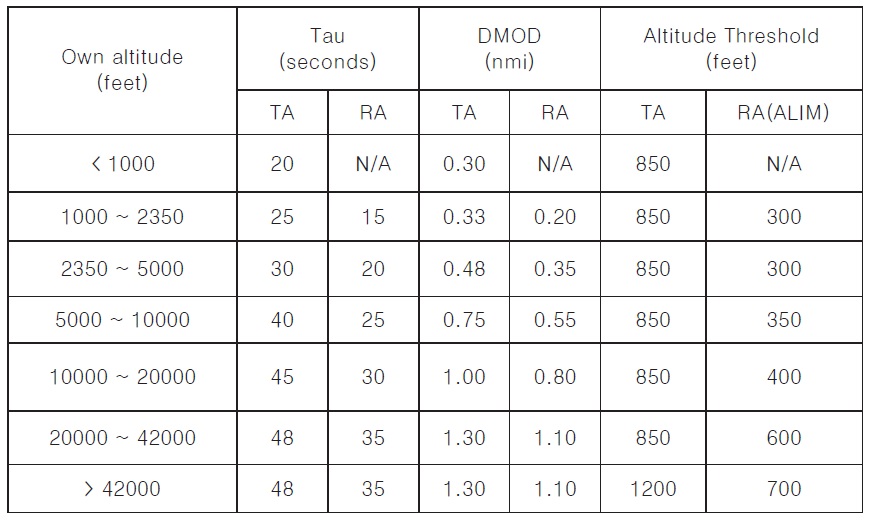
[Table 1.] Criterion of TA and RA (from reference
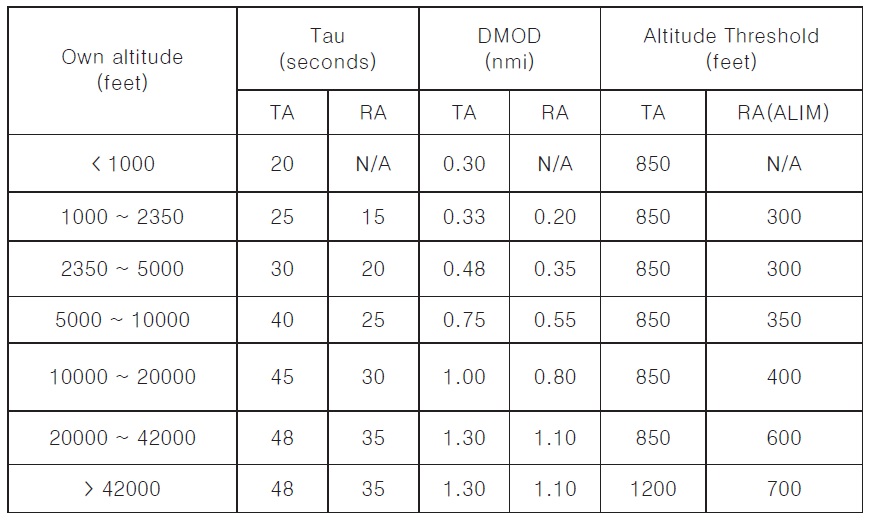
Criterion of TA and RA (from reference
TCAS is a collision detection avoidance system that prevents mid-air collision, along with structured airspace and various Air Traffic Control (ATC) procedures. The TCAS system helps pilots to visually acquire a potential threat and, if necessary, provides a last-minute collision avoidance advisory directly to the pilots [9].
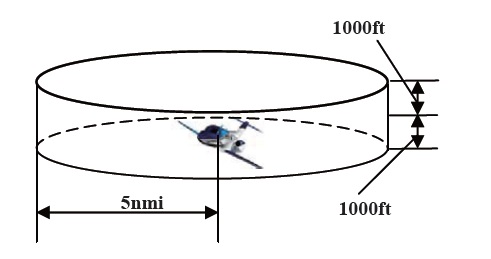
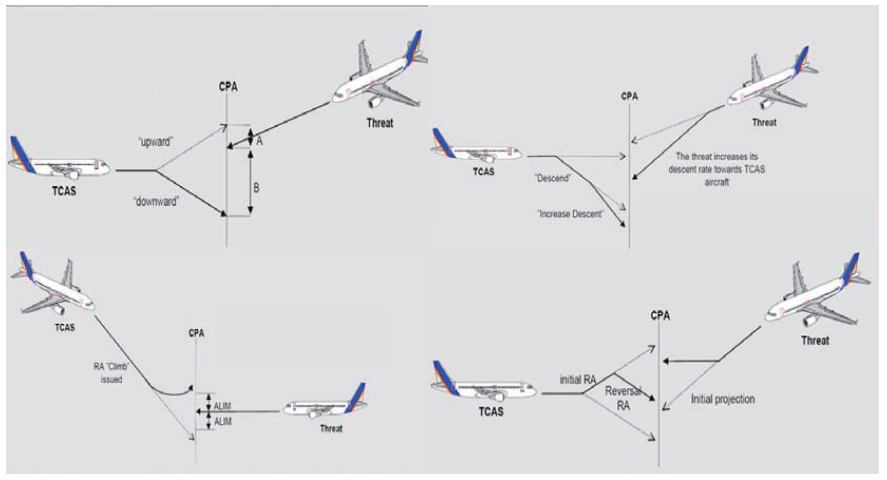
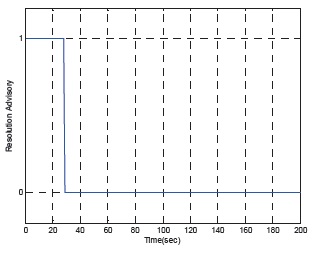
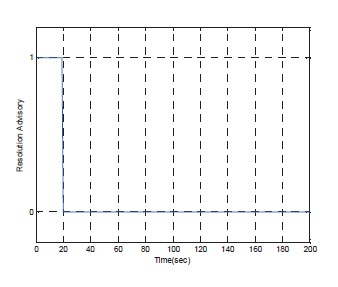
The collision detection algorithm in TCAS consists of projecting aircraft’s positions into the future, and identifying a potential intruder, based on several key metrics, including the estimated vertical and slant-range separations between aircraft, and the time until the closest point of approach between aircraft. Table 1 shows the criterion of Traffic Advisory (TA) and Resolution Advisory (RA). If a predicted collision is classified as TA, the TCAS issues the TA al-ert in the cockpit. If the situation is considered as RA, the TCAS issues not only a RA alert but also additional advisory for possible aircraft’s maneuvers, as shown in Fig. 1.
3. Modelling Of 3-D Resolution Method
The aircraft’s horizontal and vertical positions can be expressed as



where,
The aircraft’s turn dynamics can be expressed as



where,
3.2 State Propagation and Conflict Detection
The uncertainty levels in aircraft’s each state can be expressed as follows.


Equation (7) represents the uncertainty in the current location of aircraft, while the uncertainty level in the predicted position (as in Eq. (6)) can be found by translating the uncertainties in the aircraft’s current speed, path angle, and heading angle into the aircraft positions, which can be found by using the Taylor expansion through Eq. (1)~Eq. (3). The uncertainty levels used in Eqs. (7)~(8) are practical values for a typical commercial aircraft [5]. Once we find the probabilistic expression of aircraft future locations, the probability of conflict between two aircraft can be found as follows:

where, Rs is the horizontal separation standard, and

is the relative distance between two aircraft.

and

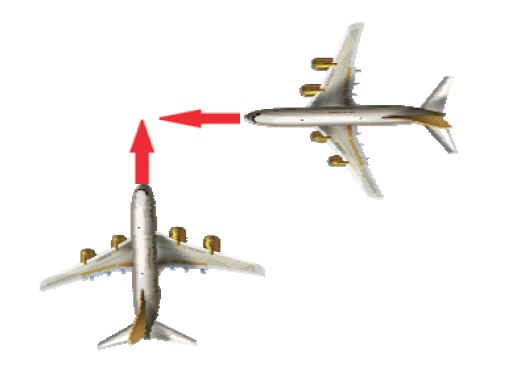
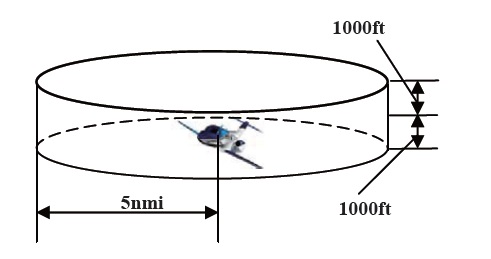
It is necessary to have a clear definition of a conflict. In this framework, a ‘Conflict’ is an event in which two or more aircraft experience a loss of minimum separation, as illustrated in Fig. 2. However, we assume that a ‘Collision’ means a physical confrontation of two aircraft.
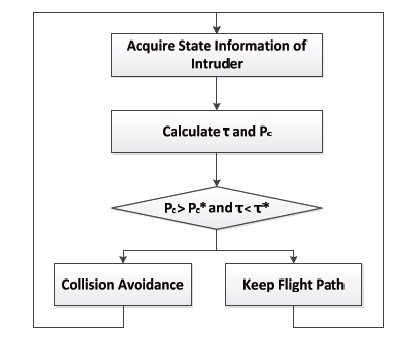
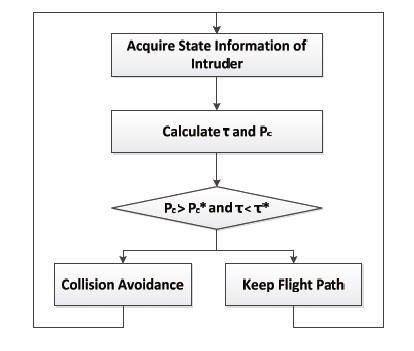
If a collision is predicted by the method explained in the previous section, the aircraft turn with the bank angle of 20 degrees, and climbs (or descends) with the rate of 1500 ft/m. The 20 degrees is the typical value for aircraft’s medium turn [5], and 1500 ft/m climb (or descent) rate is the value used in the current version of TCAS [6]. As future works, different values for the bank angle and the vertical rate should be adopted in the proposed algorithm. This process is illustrated by the flow chart in Fig. 3, in which Pc is the probability of conflict, and τ is the time to the Closest Point of Approach (CPA). Pc* is a given criterion for Pc, and τ* is a
given criterion for τ.
4.1 Resolution of Conflicts Involving Pair Aircraft
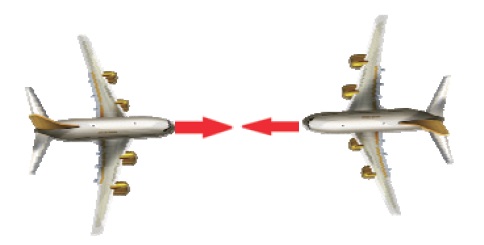
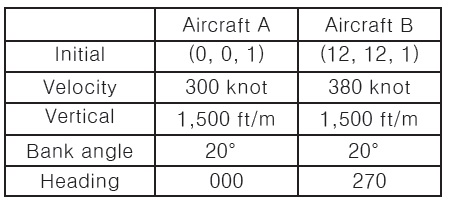
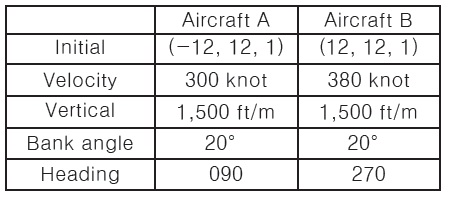
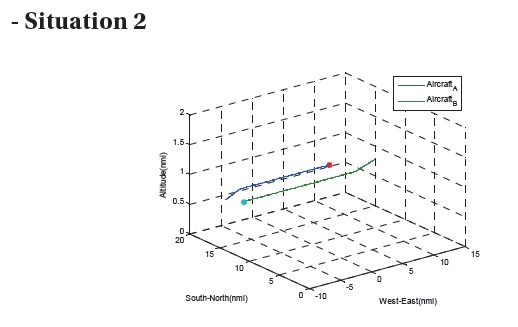
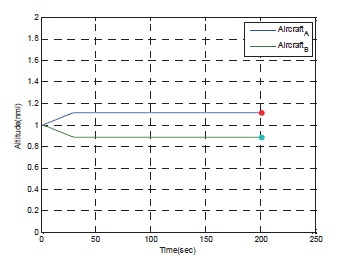
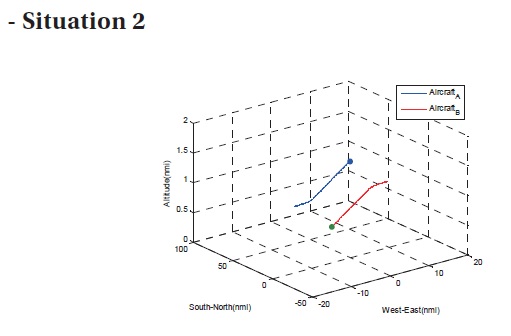
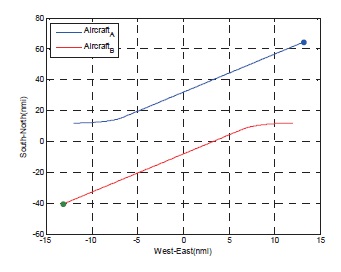
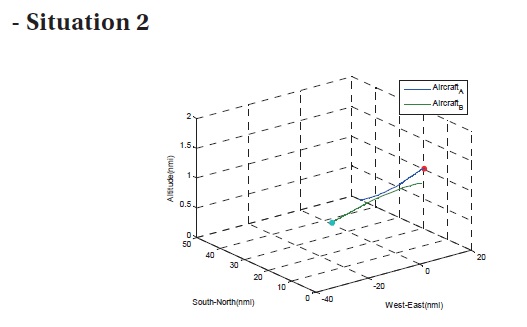
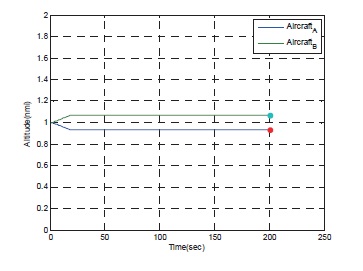
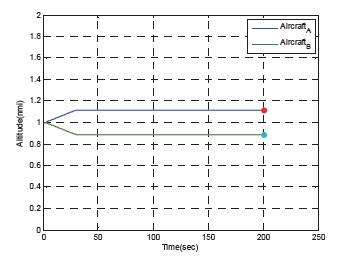
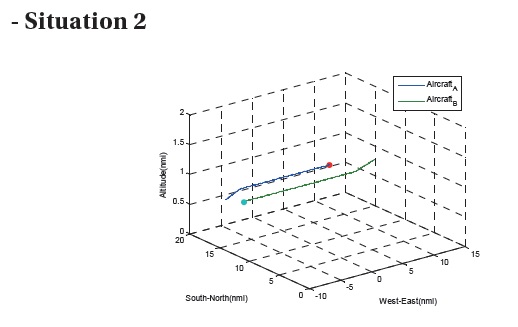
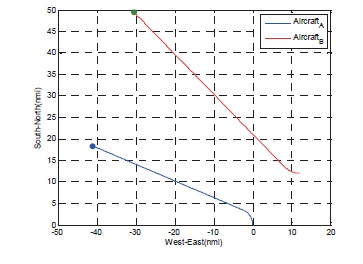
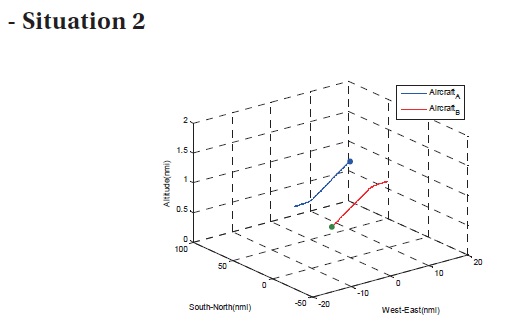
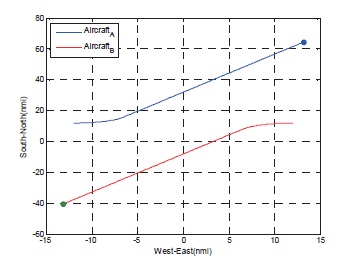
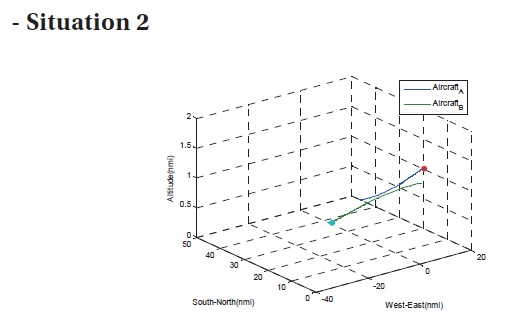
The simulations are conducted with two situations. The first is that both aircraft go across a track. The second is that both aircraft are facing each other.
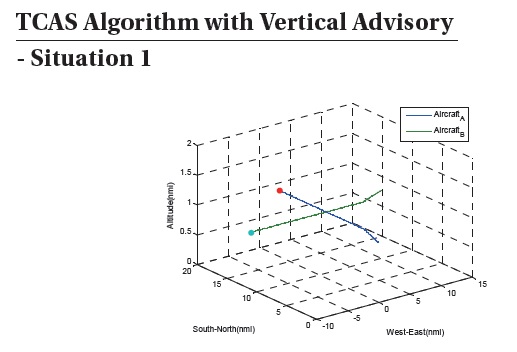
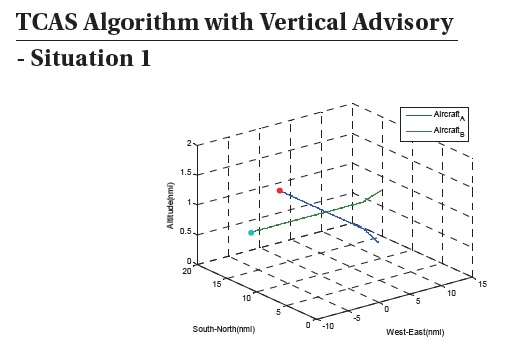
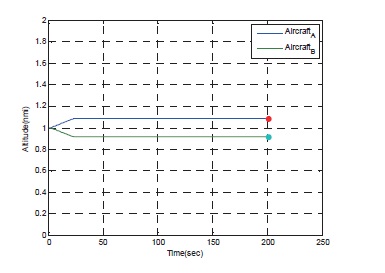
Three different collision avoidance algorithms were compared. First, we applied the algorithm in the current version of TCAS to each traffic scenario. Figures 6~13 show the simulation results. Then, we applied the collision
[Table 2.] Initial condition of Situation 1
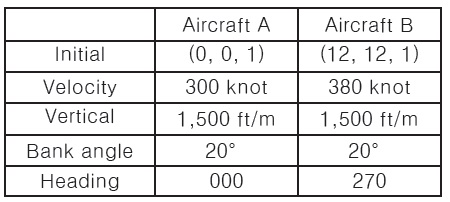
Initial condition of Situation 1
[Table 3.] Initial condition of Situation 2
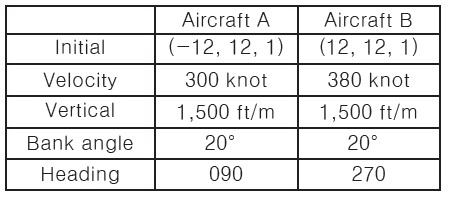
Initial condition of Situation 2
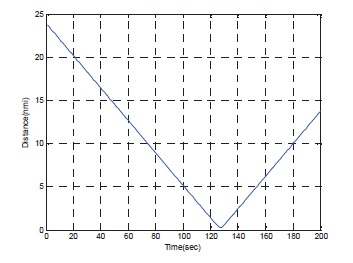
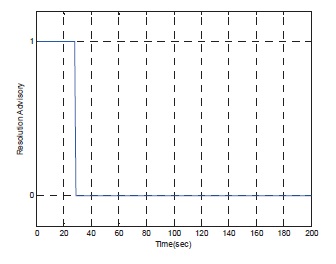
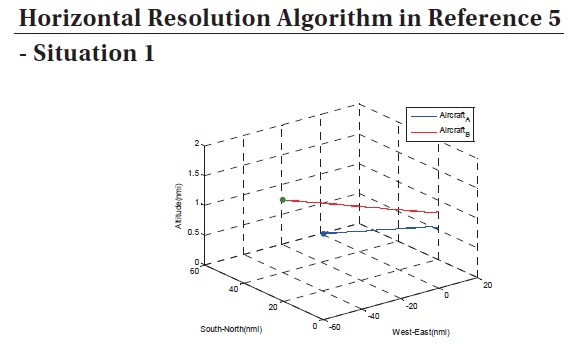
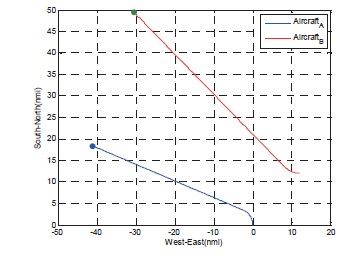
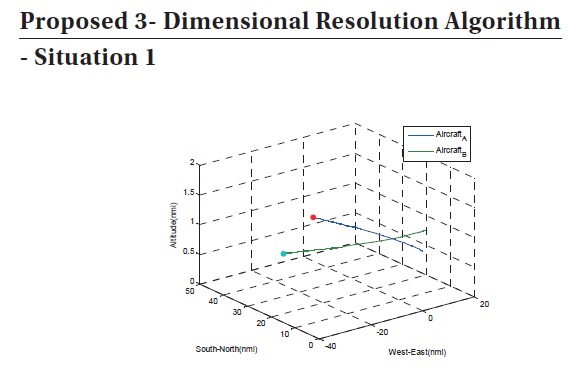
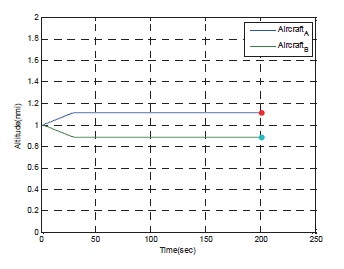
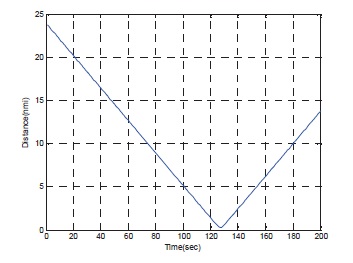
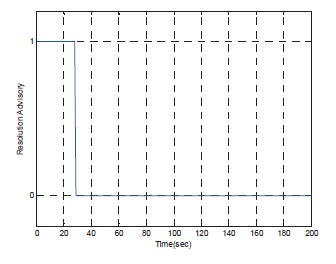
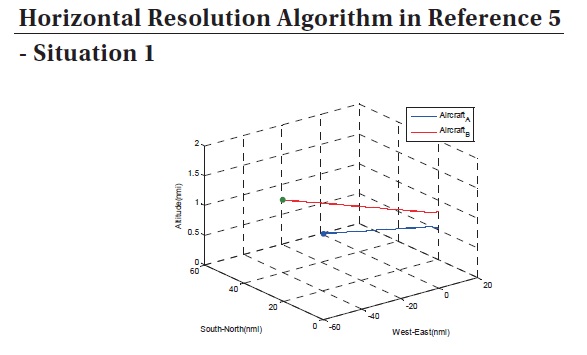
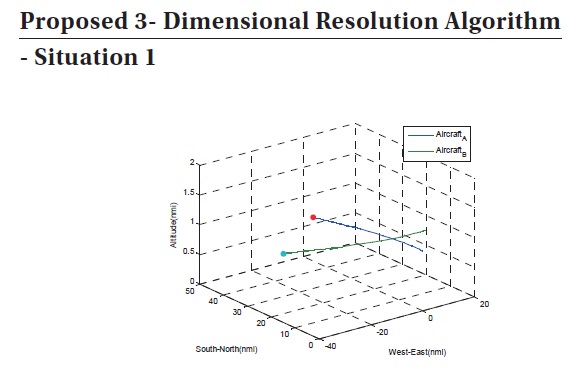
avoidance algorithm in [5], which considers only horizontal maneuver of the aircraft, by taking into account the aircraft’s turn dynamics. Figures 14~21 show the simulation results. Lastly, we applied the proposed method of collision avoidance, which is the combination of the vertical resolution advisory in TCAS and the horizontal resolution with the dynamics of the aircraft’s bank turn. Figures 22~29
show the simulation results.
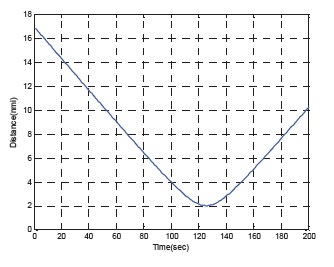
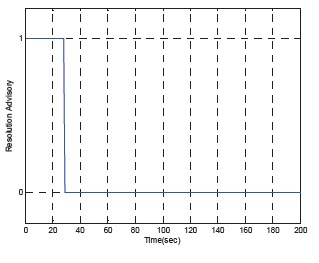
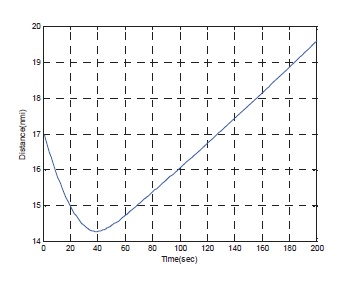
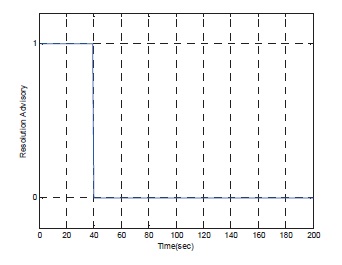
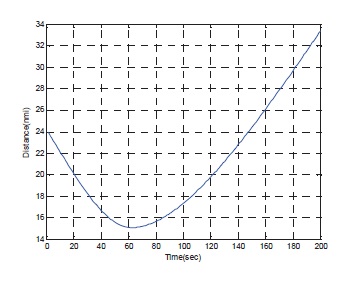
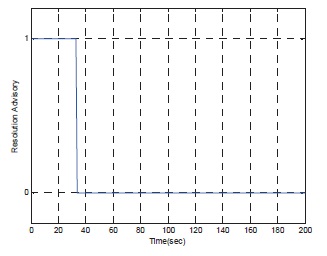
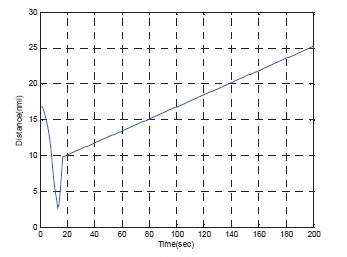
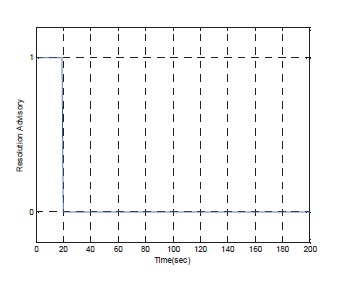
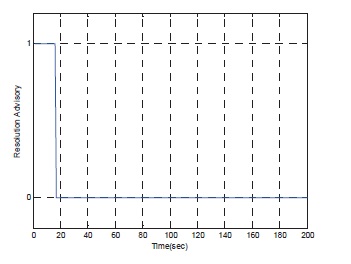
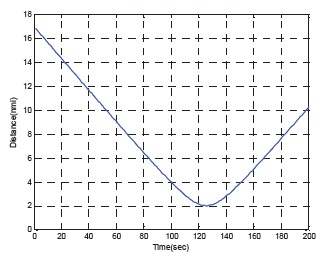
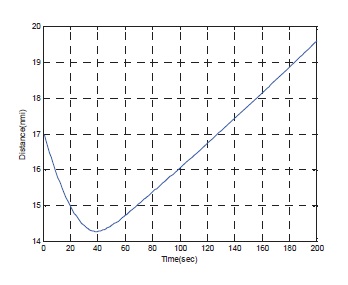
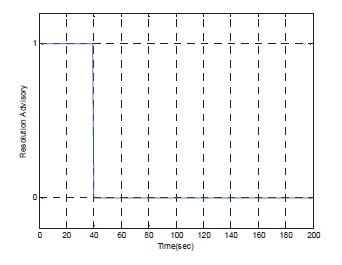
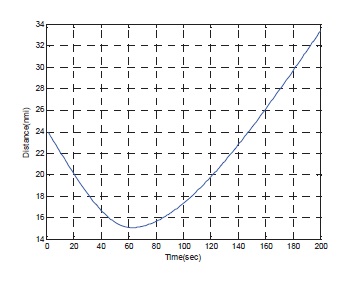
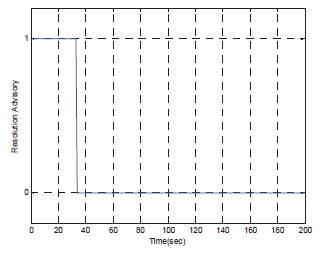
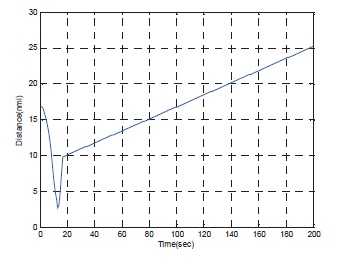
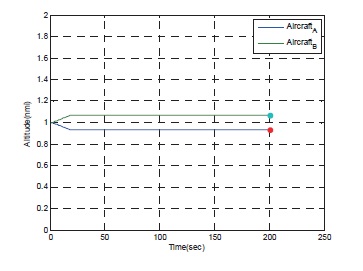
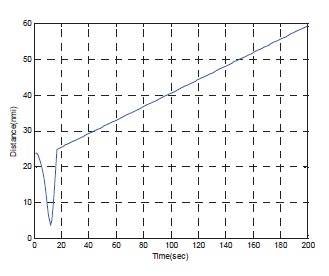
As shown in Figs. 8, 12, 16, 20, 24, and 28, the horizontal resolution algorithm could provide the largest separation between aircraft, among the three methods of collision avoidance, for both scenarios in Tables 2 and 3. However, the horizontal resolution algorithm requires the longest time of resolution, as shown in Figs. 9, 13, 17, 21, 25, and 29.
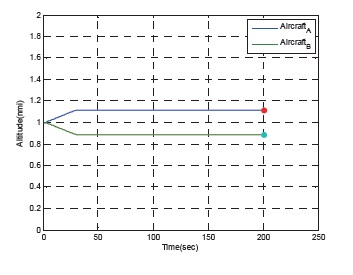
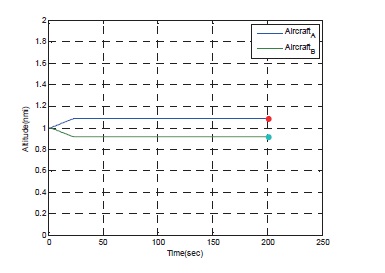
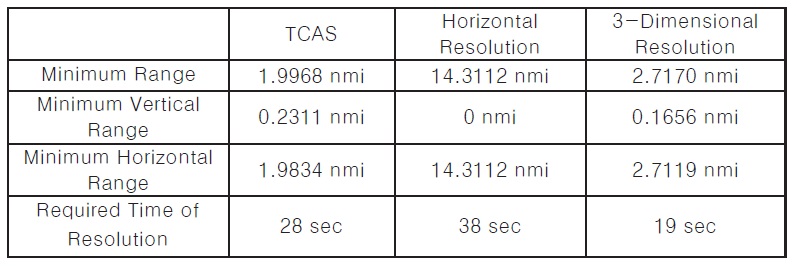
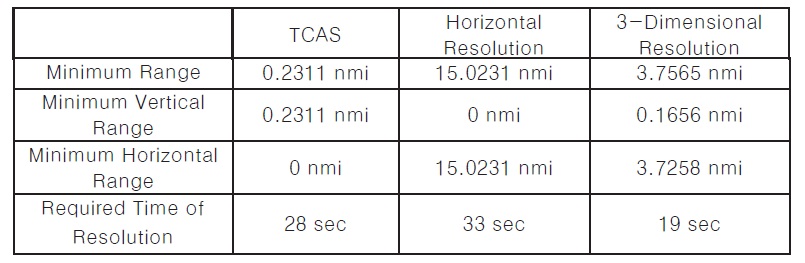
On the other hand, the TCAS algorithm only, with vertical maneuver of aircraft, provides a shorter time of resolution, but it maintains far smaller separation between aircraft than the horizontal resolution algorithm. The proposed 3-dimensional resolution algorithm could provide more balanced performances. As shown in Tables 4 and 5, the proposed algorithm requires the shortest time of resolution, while a relatively large separation between aircraft can also be maintained, compared to the two previous collision avoidance algorithms.
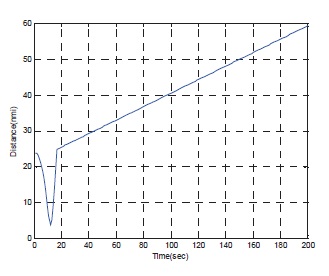
Each of the aircraft trajectories for the three different algorithms in both scenarios are shown in Figs. 6~7, 10~11, 14~15, 18~19, 22~23 and 26~27.
[Table 4.] Simulation result of situation 1
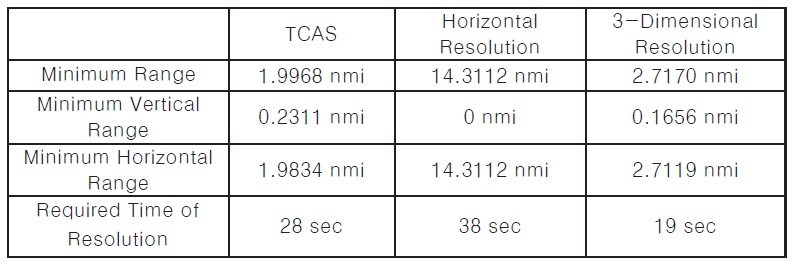
Simulation result of situation 1
[Table 5.] Simulation result of situation 2
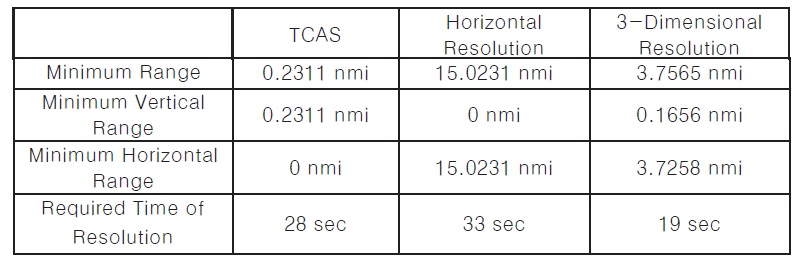
Simulation result of situation 2
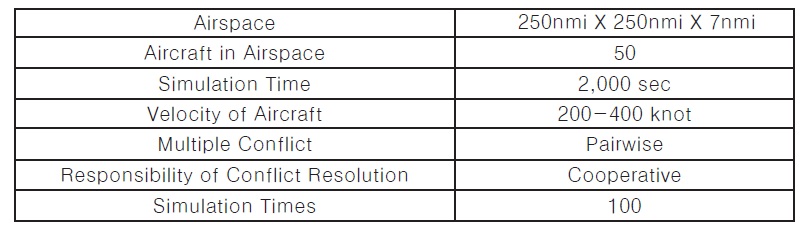
[Table 6.] Initial condition of simulation
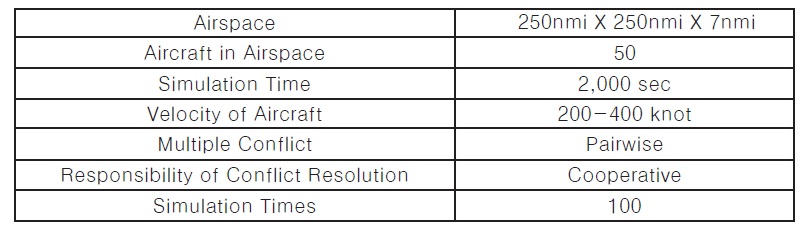
Initial condition of simulation
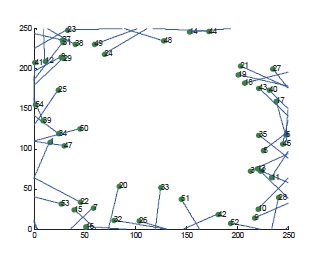
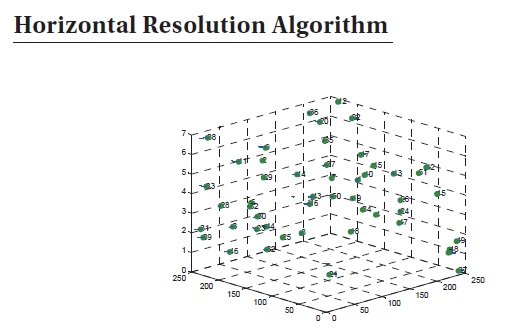
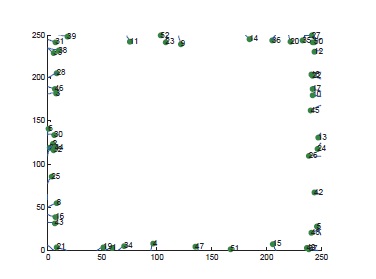
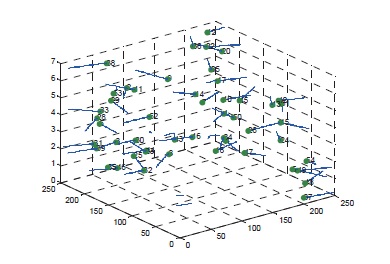
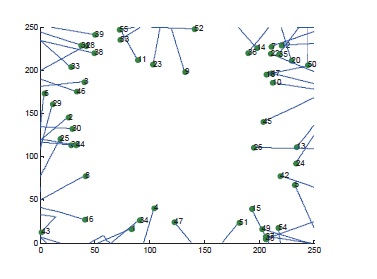
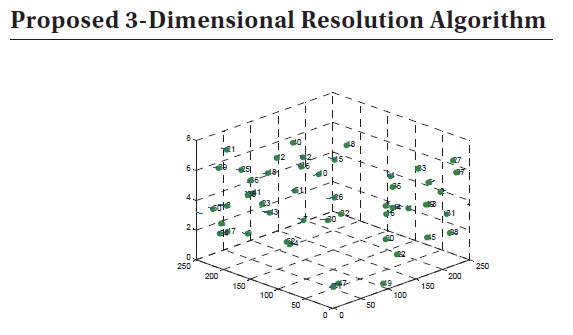
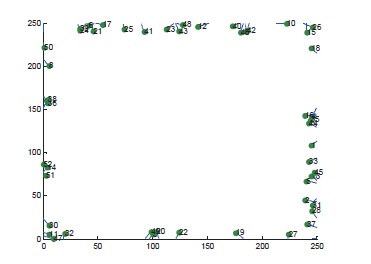
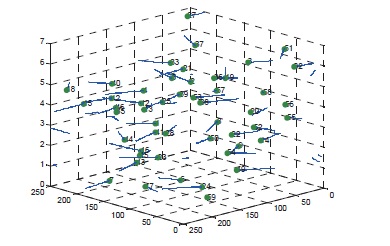
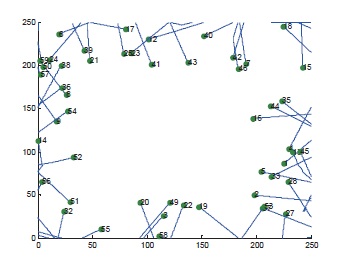
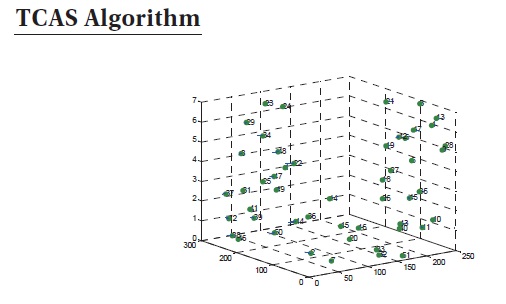
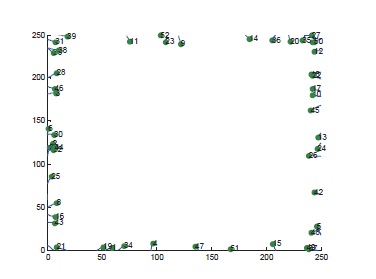
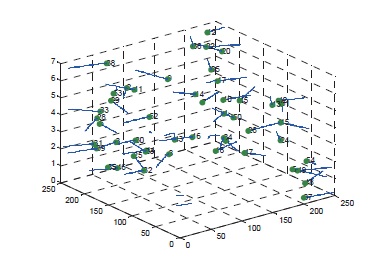
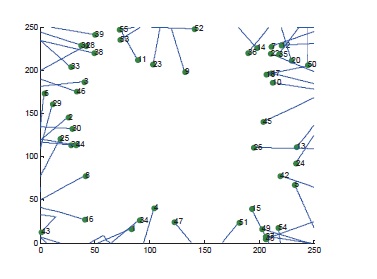
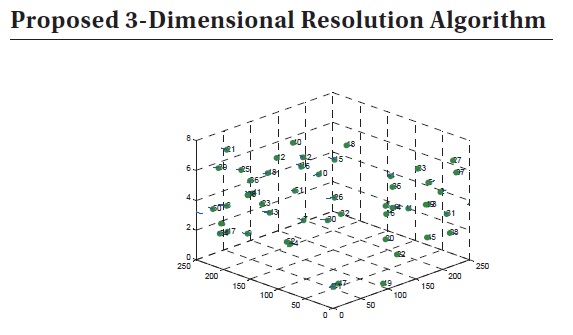
4.2 Resolution of Conflicts Involving Multiple Aircraft
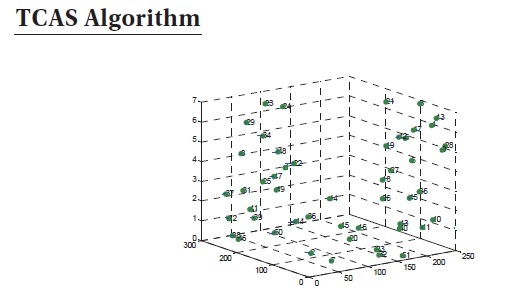
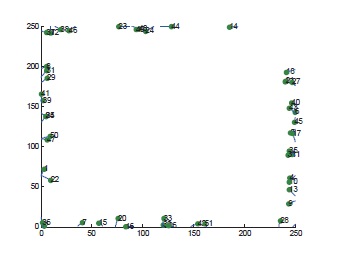
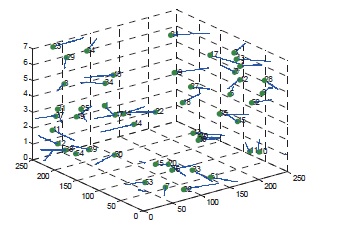
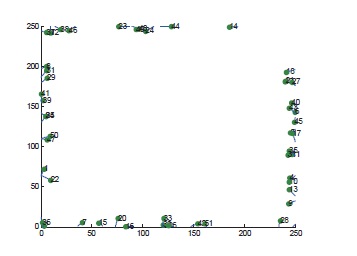
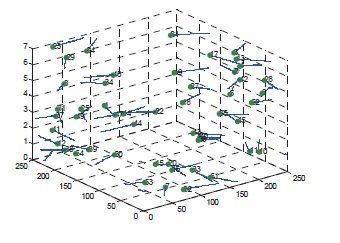
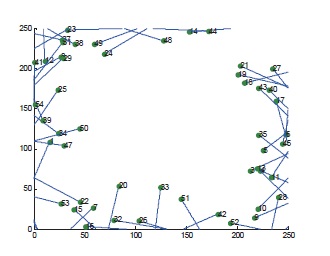
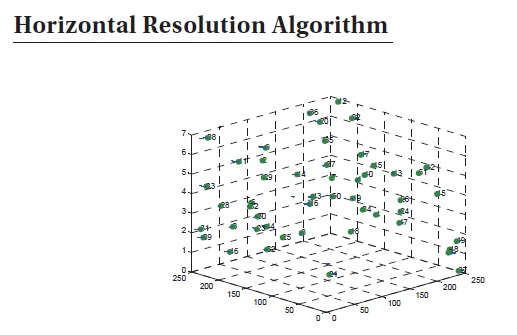
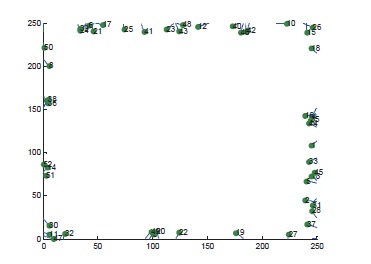
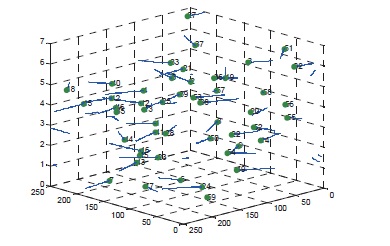
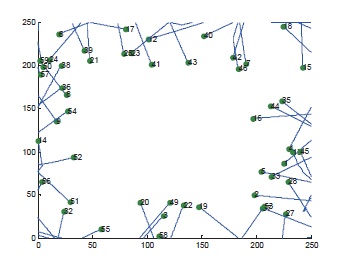
In this section, the conflict situation with multiple aircraft is considered. 50 aircraft are involved, and the conflicts among these aircraft are resolved with the three different resolution algorithms explained in the previous sections. Table 6 is a summary of the simulation condition involving multiple aircraft. Figures 30~33, figures 34~37, and figures 38~41 show the aircraft resolution trajectories for the TCAS algorithm, the horizontal resolution algorithm, and the proposed 3-dimensional resolution algorithm, respectively.
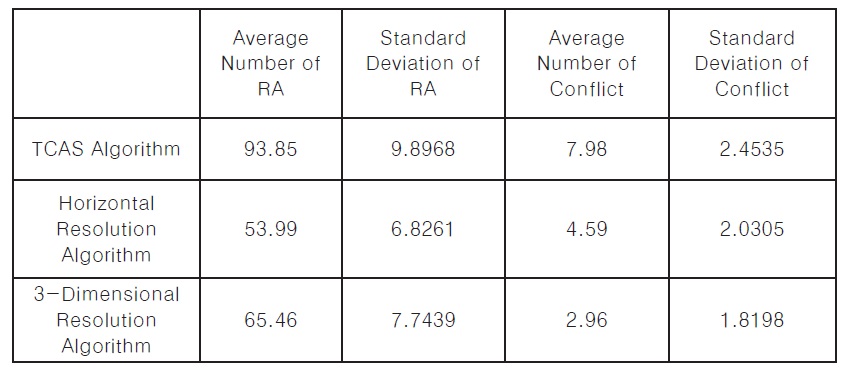
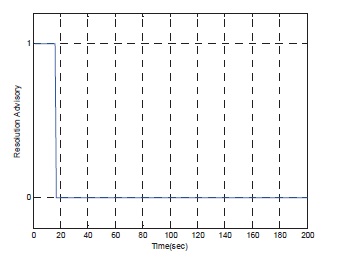
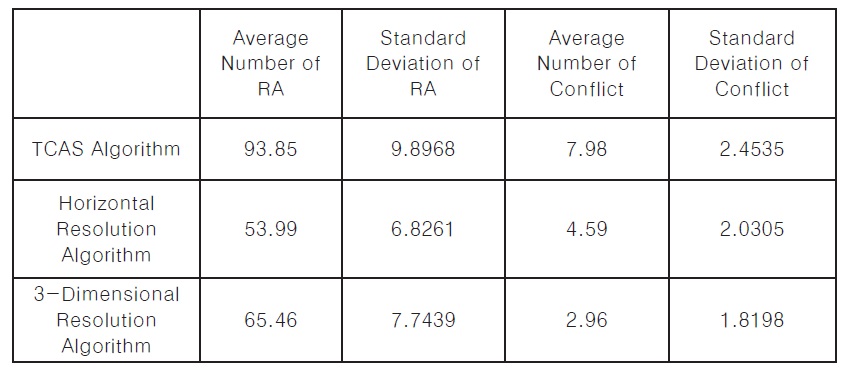
As shown in Table 7, the greatest occurrence of RA is in the TCAS algorithm, and the smallest occurrence of RA is in the horizontal resolution algorithm. This means that the horizontal resolution algorithm can solve heavy traffic with the smallest avoidance maneuvers, compared with the others.
However, in terms of the conflicts occurred, the proposed 3-dimensional resolution algorithm has shown improved performance, i.e., a reduced number of average conflicts, compared to both the TCAS algorithm and the horizontal
Simulation result
resolution algorithm. Note that no collision occurred in our simulation, but conflicts, i.e. the cases where the distance between two aircraft is less than the separation standard, did in fact occur.
In the paper, a 3-dimensional resolution algorithm for aircraft collision detection and avoidance is presented. The algorithm calculates the probability of collision under the presence of uncertainty in the aircraft’s state variables. If the algorithm judges that a collision between aircraft is to occur, the aircraft is asked to perform avoidance maneuvers in both vertical and horizontal directions at the same time.
For verifying the performance of the algorithm, simulations with various traffic scenarios were performed. The results show that the proposed 3-dimensional resolution algorithm may provide improved performances over the other two previously proposed collision avoidance algorithms, while more extensive simulation should further be performed.
Future work should further evaluate performances of the proposed method, with traffic scenarios involving more realistic airspace environments. More study is necessary to investigate how to extend the time horizon of detecting
a collision by effectively taking the aircraft’s intent into account.

![State Diagram of RA (from reference [10])](http://oak.go.kr/repository/journal/12553/HGJHC0_2013_v14n3_272_f001.jpg)