A medium pulse repetition frequency (PRF) pulsed-Doppler radar commonly resolves the ambiguities of target returns by using an
The problem is that a 2-of-3 PRF schedule has serious problems of ghosting. Nevertheless, ghosting problems can be mitigated by circular switching of the operating set among the multiple PRF sets at an instant of target detection [3]. Therefore, in this letter, we propose the use of a triple 2-of-3 PRF schedule for real-time searching of PRF sets and elimination of ghost targets. We describe a real-time search method for the optimal (and sub-optimal) 2-of-3 PRF schedules and the application of the triple 2-of-3 PRF schedule are described in medium PRF pulsed-Doppler airborne radars.
A method is proposed for selecting the 2-of-3 PRF schedule. Constraints affecting the selection of the PRF set are decodability, ghosting, minimization of blind regions, and bounds of available PRFs (the number
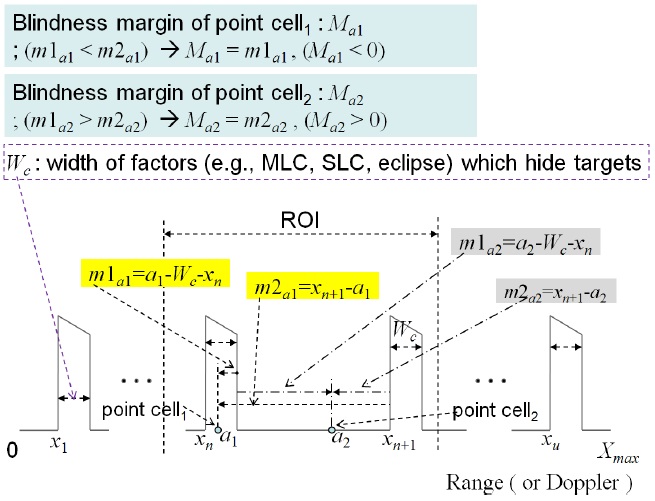
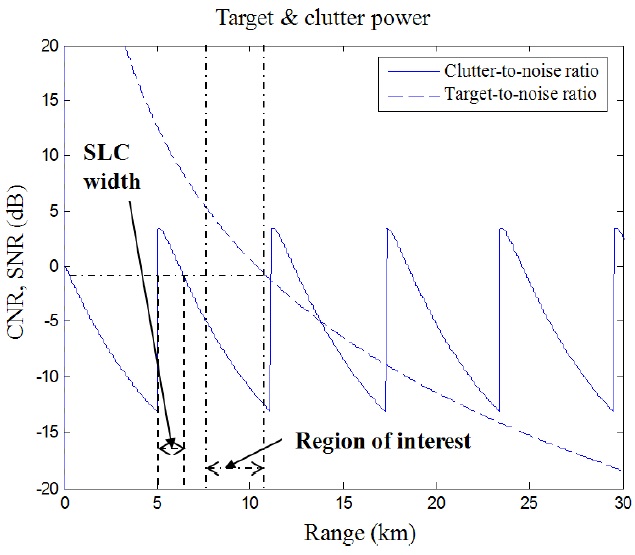
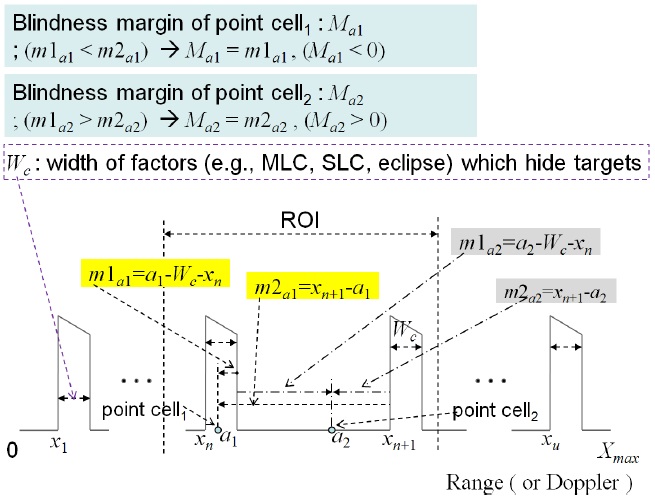
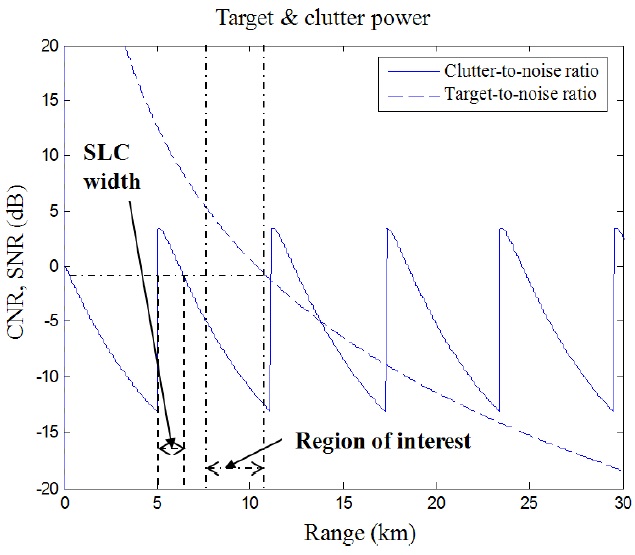
The widths of the blinding factors are as follows: the MLC width is the rejection notch bandwidth of MLC (MLC width is determined by flight speed, beamwidth of antenna, and etc.); the width for eclipse is the transmitted pulse width; and the SLC width is determined as shown in Fig. 2.
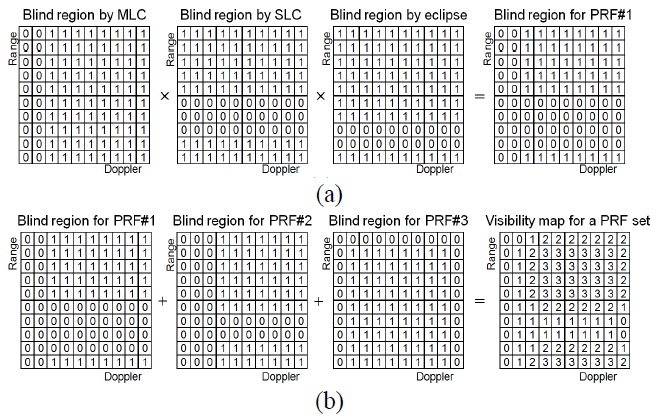
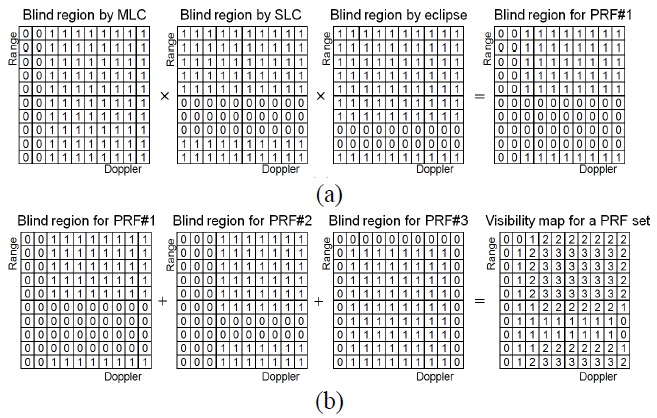
In Fig. 2, the SLC power at a range is calculated using a surface reflectivity model, flight altitude, etc., and the minimum target power in the ROI (for the worst case) is calculated considering a certain target. The SLC width is determined as the width of the region in which minimum target power is smaller than SLC power, and targets placed within the width are invisible. Next, we determine the blind region of ROI for each blinding factor using the blindness margin in each PRF, and blind regions of PRFs are combined, as shown in Fig. 3. For the MLC, values are assigned to Doppler cells of the ROI according to the blindness margin of the cells in a PRF. If the blindness margin of a cell is negative, a value of 0 is assigned to the cell. If the blindness margin of a cell is positive, a value of 1 is assigned to the cell. A value of 0 represents a blind cell, and a value of 1 represents a clear cell.
The values assigned to Doppler cells of the ROI are extended to the range cells of the ROI. The blind region for MLC is then determined in a PRF. In the cases of SLC and eclipse, values are assigned to the range cells of the ROI according to the blindness margin, and the values are extended to the Doppler cells of the ROI. Blind regions determined by blinding factors are combined by multiplying arrays, as in Fig. 3(a) and then the blind region for a PRF is determined. Blind regions for PRFs are combined by adding arrays as in Fig 3(b); then a visibility map for a PRF set is determined.
In 2-of-3 PRF schedules, if a cell of the ROI is clear in at least two PRFs, a target of the cell can be detected. Therefore, in a visibility map, targets of cells that have values of at least 2 are visible. From the visibility map, the visibility of the 2-of-3 PRF set is calculated by [(visibility of a PRF set)=(number of cells which have value of at least 2)/(total number of cells in ROI)] as in Fig. 3(b). In each battle condition, the values of visibility of the pre-selected PRF sets are calculated by using the method just described for the ROI, and the priorities of the PRF sets are determined according to these values of visibility. Finally, the top 3 in the priority list are selected as the triple 2-of-3 PRF set.
A method of target detection for the triple 2-of-3 PRF schedule is proposed. We first obtain the results of target detection in each PRF set through sequential uses of three 2-of-3 PRF schedules. Some of the three PRF sets may then produce ghost targets in target detection, but the locations of ghost targets within ROI vary according to the PRF set. Secondly, the targets whose locations match at more than two PRF sets are admitted as the true targets from among the detected targets in PRF sets. That is, for the targets detected from three PRF sets, the true targets are confirmed by applying the logic of the 2-of-3 scheme to the triple PRF set, and the ghost targets are eliminated.
Ⅳ. Test Simulations and Results
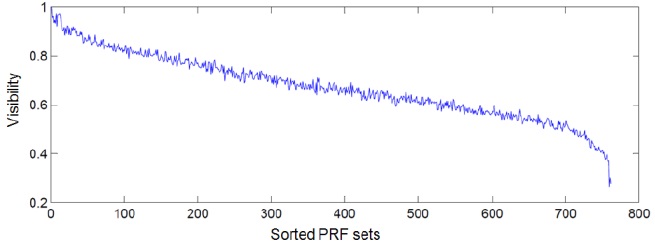
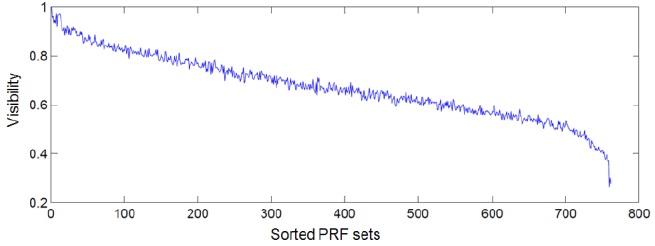
We showed the effectiveness of the real-time search method of triple 2-of-3 PRF sets by applying the proposed search method to simulated data for traces of an aircraft and ROI (traces of platform and target). That is, the positions of the platform and ROI continuously change in our simulation environment. First, we preselected 762 PRF sets (which satisfied decodability constraints) from
As shown in the example in Fig. 4, the real-time search method of PRF sets operated effectively. PRF sets were selected in less than 1 ms for a ROI of range width 3 km and Doppler width 20 kHz (using Intel 1 GHz CPU). The 4-of-9 scheme transmits 9 PRFs and resolves ambiguities using target detections in more than 4 PRFs of 9 PRFs. Our triple 2-of-3 scheme transmits 9 PRFs (sequence of three 2-of-3 PRF schedules). Each 2-of-3 PRF schedule resolves ambiguities using target detections in more than 2-of-3 PRFs, and targets whose locations match at more than two of three PRF sets are admitted as the true targets (that is, the triple 2-of-3 scheme uses target detections in more than 4 PRFs). Therefore, the triple 2-of-3 PRF schedule was comparable with the 4-of-9 PRF schedule, but the current real-time searching of PRF sets for the 4-of-9 PRF schedule is impossible. In a thousand experiments, the two PRF schedules (triple 2-of-3 and 4-of-9) showed the same performance in target detection and elimination of ghost targets.
A real-time method that searches optimal or sub-optimal PRF sets according to momentary battle situations was presented for medium PRF pulsed-Doppler airborne radars. An effective method of real-time selection of PRF sets for 2-of-3 PRF scheme was developed and the triple 2-of-3 PRF scheme was proposed for elimination of ghost targets. This proposed method shows good performance and operates in real time.