Digital Speckle Correlation Measurement (DSCM) is an optical technique developed for full field and non-contact measuring of surface displacement and deformation [1]. This method utilizes a natural or artificial surface speckle pattern as an information carrier and sum of squared differences or cross correlates two slightly different images captured before and after a deformation, to obtain the whole field displacement of a planar specimen surface.
An important issue about the DCSM method is accuracy and precision. There are several factors influencing the accuracy of the DSCM method. The measurement errors may be classified in two types: errors associated with the experimental setup (acquisition system, illumination conditions) and errors associated with the correlation algorithm. The experimental errors are related basically to the variations of illumination and the quality of the acquisition system, i.e., the noise during the acquisition and digitalization [2], the camera lens distortion [3], position of the camera respect to the specimen, etc. The errors related to the algorithm are due to different choices of the implementation of the algorithm, such as the choice of the subset size [4,5], correlation function [6], sub-pixel interpolation algorithm [7,8], subset shape function [9,10] and speckle pattern quality [11]. Recently, analytical results have been derived about the effect of random image noise on the precision of displacement measurements by the DSCM method for rigid body motion estimation [12]. In [7], the performance of three most used sub-pixel algorithms were compared for simulated images. These algorithms were known as curve -fitting, gradient-based and Newton-Raphson algorithms. The results showed that the Newton-Raphson approach is the more accurate and stable. But its computation time is much longer than that of gradient-based algorithms. Taking into the requirements both in calculation accuracy and in calculation speed, the gradient-based method is a better replacement of the Newton-Raphson method. Other interesting approaches like the use of genetic algorithms, finite elements and B-splines are reported in [13], but it appears to have a lower performance than gradient-based algorithms in terms of accuracy. A study of the systematic errors due to use of shape functions of lower order than the actual displacement field was presented in [9]. Some requirements were presented about properties of the pattern, subset size and order of the shape functions. In [4], a theoretical model of the displacement measurement accuracy of DSCM was accurately predicted based on the variance of image noise and Sum of Square of Subset Intensity Gradients (SSSIG). The model further led to a simple criterion for choosing a proper subset size for the DSCM analysis. Further, in [11], it proposed the Mean Intensity Gradient to obtain the optimal subset size, where the Newton -Raphson algorithm was used, the simplest correlation coefficient and the zero-order shape function for pure in-plane translation tests. In [14], a method was presented to estimate an appropriate pattern density for different subset sizes determining the characteristic sampling length of the speckle granules. From the above descriptions, it can be seen that assessment of DSCM measurement errors in practice is important but confusing. The measurement accuracy of DSCM depends on a number of factors. The effects of these factors (e.g. speckle pattern, out of plane displacement, lens distortion, noise, subset size, sub-pixel registration algorithm, shape function, interpolation scheme) have been investigated separately in previous studies. Few reported quantitative works have been performed to systematically evaluate the gradient-based DSCM measurement errors. Therefore, understanding the major constituent of gradient-based digital speckle correlation measurement errors and describe them in mathematical derivation is necessary and helpful.
In this study, an analysis has been carried out on the standard deviation of displacement measurement errors by gradient-based DSCM. A new formulation will be used to explicitly account for the image grayscale error due to sub-pixel interpolation errors, image noise, and subset deformation mismatch at each point of the subset. Numerical and experiment results of error estimation will be presented to validate the analytical formulas on the standard deviation of displacement measurement errors, and to assess individual and combined effects of sub-pixel interpolation errors, image noise, and subset deformation mismatch on the precision of displacement measurements. The final formulation can not only be used to predict the displacement measurement error, but also to give us some hints on how to improve the displacement measurement precision of DSCM.
II. FUNDAMENTAL PRINCIPLE OF GRADIENT-BASED DSCM
The DSCM involves recording, digitizing and processing a pair of speckle patterns of an object in different deformation states, one before deformation and the other after deformation. The DSCM process is generally divided into two different stages. The first stage takes discrete, one pixel steps and correlates each one. The highest correlation is then taken to be the starting point for the next stage, which uses interpolation for sub-pixel accuracy. In routine practice of the DSCM method, a cross-correlation criterion or sum -squared-difference correlation criterion is predefined to evaluate the similarity between the reference image subset and the current image subset. The sub-pixel registration algorithm is considered as a key technique to improve displacement measurement accuracy in DSCM [7]. There are multiple ways to achieve sub-pixel accuracy that have been used successfully.
The gradient-based method as one of the DSCM methods is introduced to measure sub-pixel displacement because of its high efficiency and precision [15,16]. This method was originally developed by Davis and Freeman for use in video compression and is based on first-order spatio-temporal gradients. It starts with an assumption that the image misalignment is purely translational. This assumption is deemed to be reasonable when the subsets are small. For simplicity, both grayscale intensity value of pixels in the deformation direction of reference image

A zero-order shape function is employed due to the pure in-plane rigid body translation of the subset, it has

where
Let us assume that the integer pixel portion of the displacement (

where the term
The following sum-squared-difference (SSD) correlation coefficient is introduced for deriving a theoretical model of the displacement measurement accuracy of DSCM. The SSD correlation function is defined as
Minimization of the SSD correlation coefficient would provide the best estimate of the desired displacements. Thus we have

The iterative solution methods such as the Newton -Raphson method or Levenberg-Marquardt method can be used to solve the above nonlinear equation.
III. ERROR EVALUATION OF GRADIENT-BASED DSCM
It is noted that the displacement measurement accuracy
[TABLE 1.] Error sources of gradient-based DSCM and their expression

Error sources of gradient-based DSCM and their expression
of DSCM relies heavily on the perfection of the imaging system and the selection of a particular correlation algorithm. The errors discussed in this study are given in Table 1.
The image noise defined here will consist of both random white noise and quantization error in each image. If noise [Δ

The grayscale level of the current image

where

where [Δ
where
where [Δ
In practical applications, some ideal situation such as (1) both reference image and current image are noise-free; (2) the subset deformation can be accurately described by the a zero-order shape function; may not be met. So under non-ideal situations, the deformation parameters

The minimization of the SSD correlation coefficient
Term Δ
represents a sum grayscale errors at each pixel point and its existence usually results in the non-zero errors Δ
If both

So displacement error Δ
As shown in the analyses above, the deformation errors in DSCM are unavoidably. It is assumed that the image grayscale error Δ

If

Furthermore, the standard deviation errors of the displacement measurement can be expressed as

It is evident from Equation (18) and (19) that the displacement accuracy of DSCM is determined by the image grayscale error Δ
In addition, if Φ

IV. RESULTS OF NUMERICAL SIMULATIONS
4.1. Effects of Sub-pixel Interpolation When the reference and current image are
When the reference and current image are free of random white noise ([Δ
over a range of subset sizes for 20 image pairs with 20 different rigid body translations (
While
4.2. Effects of Random White Noise
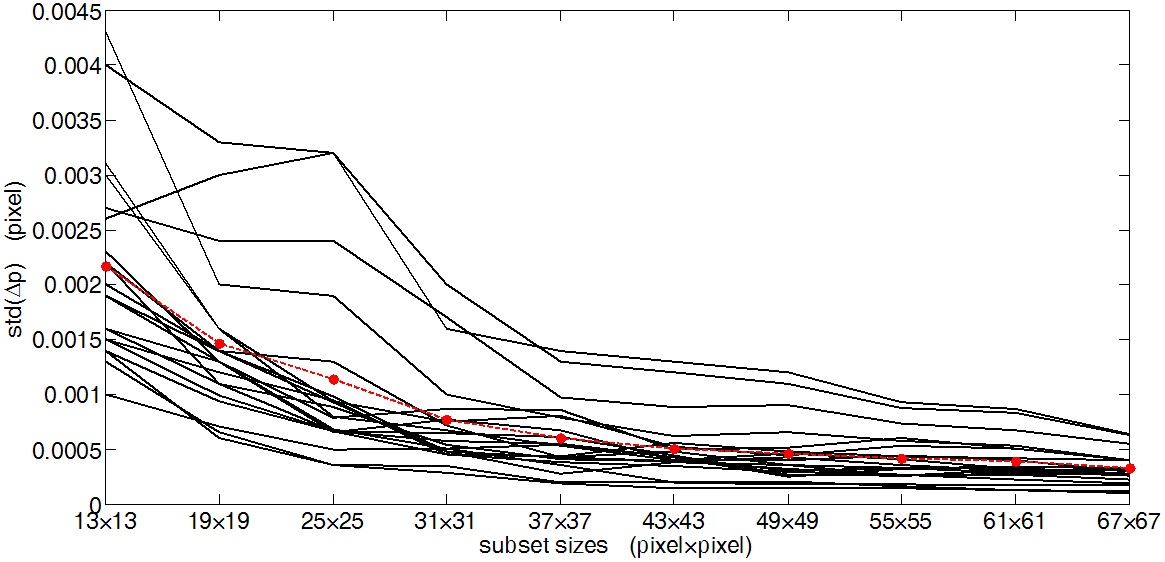
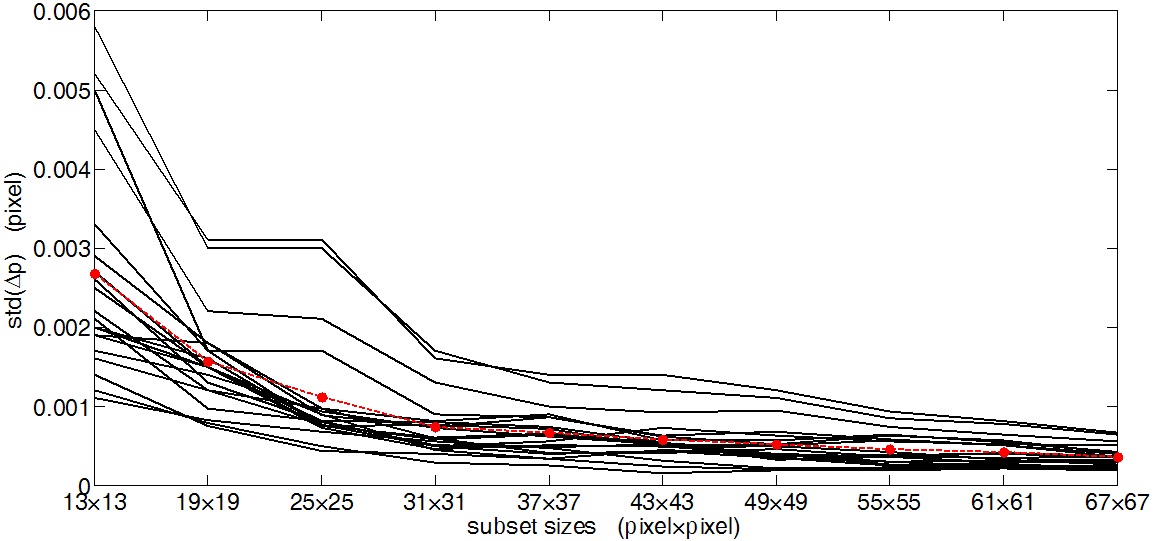
Add Gaussian noise of 0 mean and variance (σ2) of 0.2 pixels to the reference and current image. Fig. 2 shows the effect of random white noise on the standard deviation in displacement estimation error
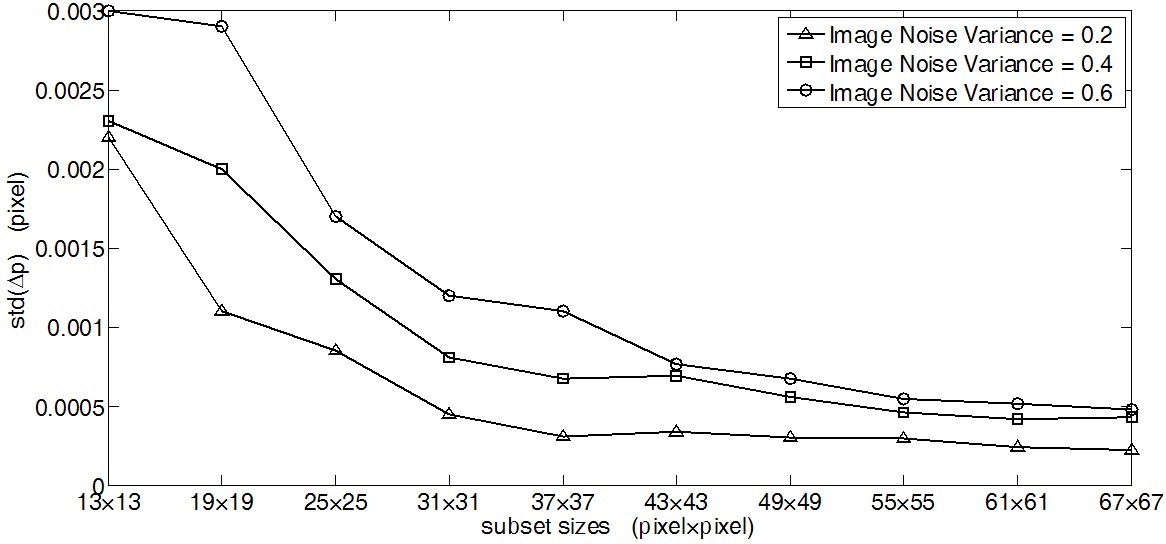
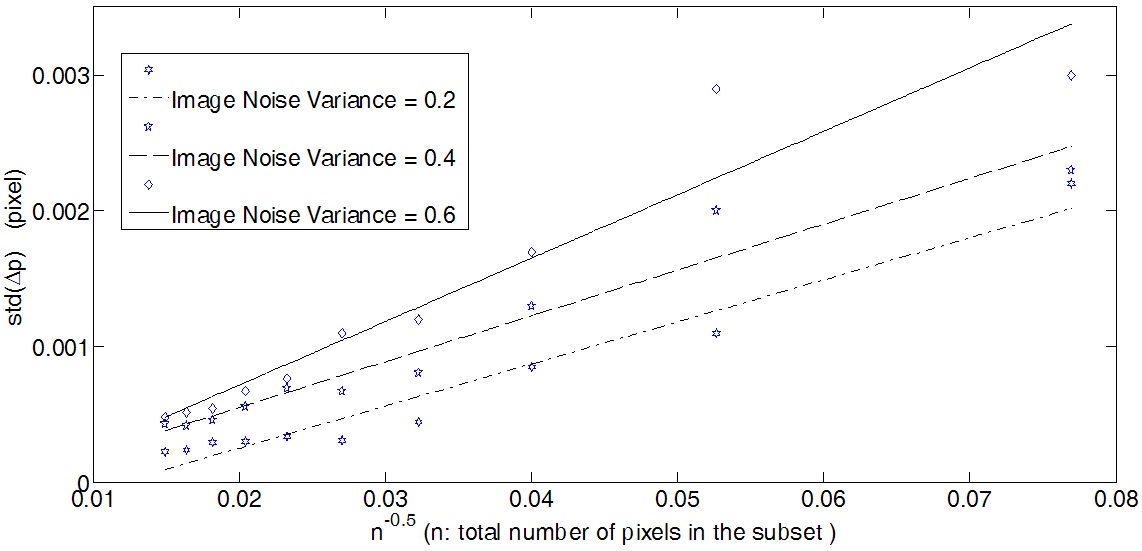
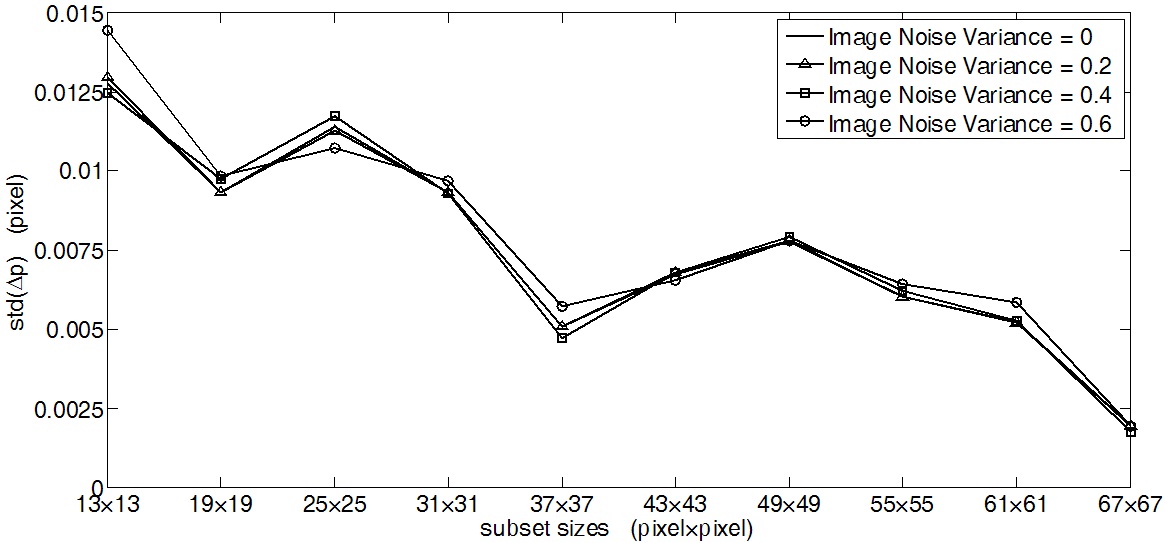
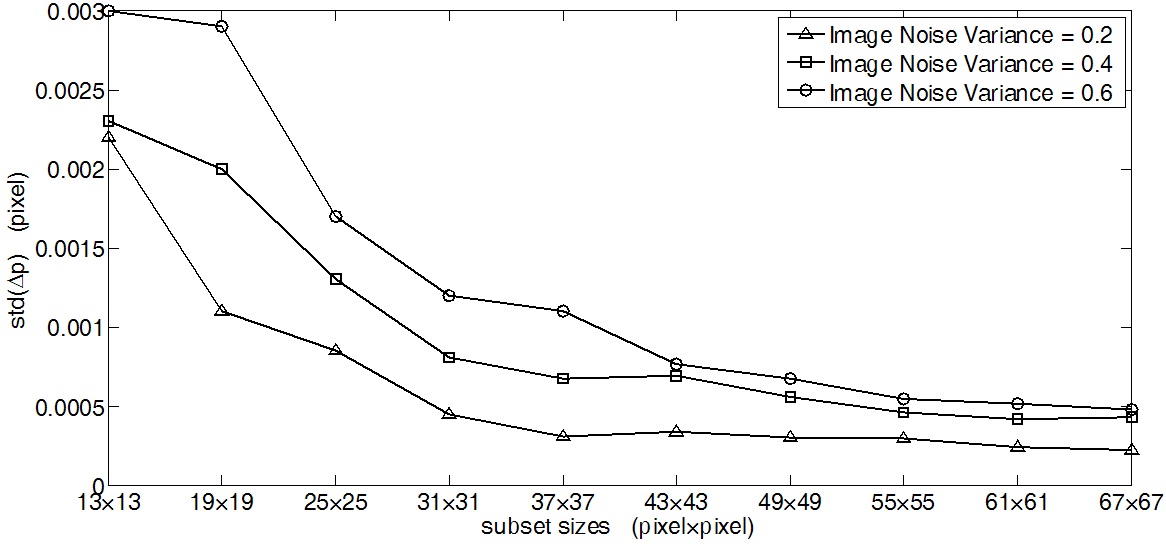
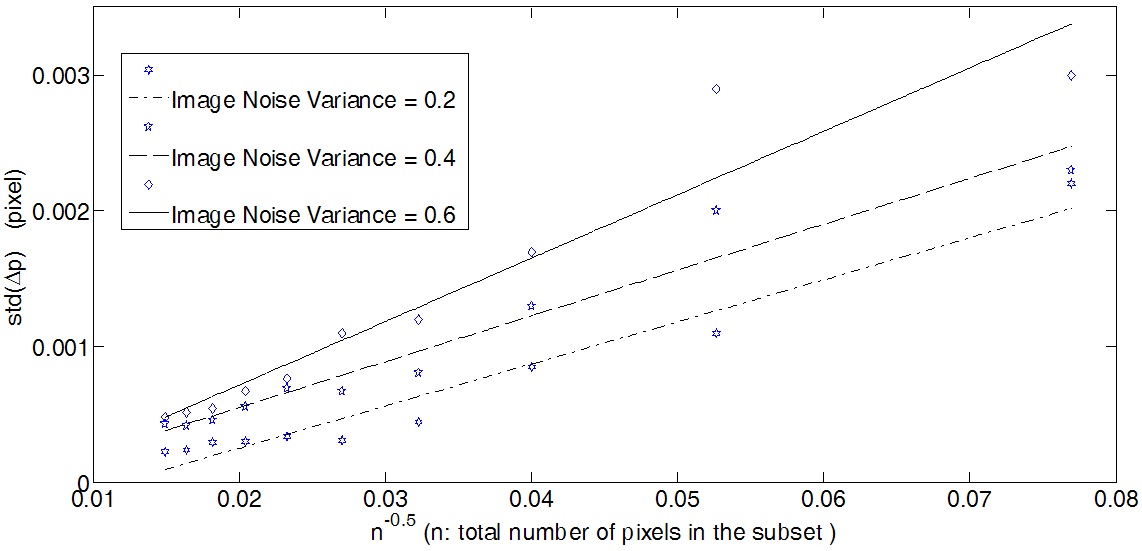
Figure 3 shows the effect of different random white noise levels (σ2 = 0.2, 0.4 and 0.6) on the standard deviation
in displacement estimation error
1.595e-7, R-square: 0.9544), 0.03379 and -1.246e-4 (with SSE: 1.995e-7, R-square: 0.952), 0.04676 and -2.181e-4 (with SSE: 6.128e-7, R-square: 0.9252) respectively for three different image noise levels.
4.3. Effects of Subset Shape Function Mismatch
The analysis above does not consider the mismatch of shape function. In practice, the deformations may contain the displacement gradient
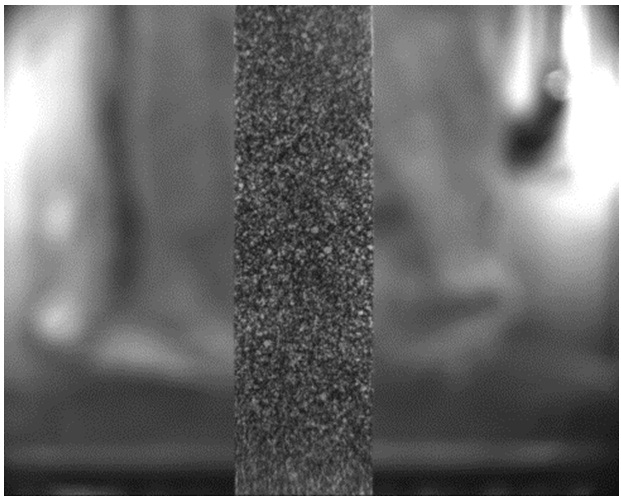
5.1. The Self-correlation Experiment
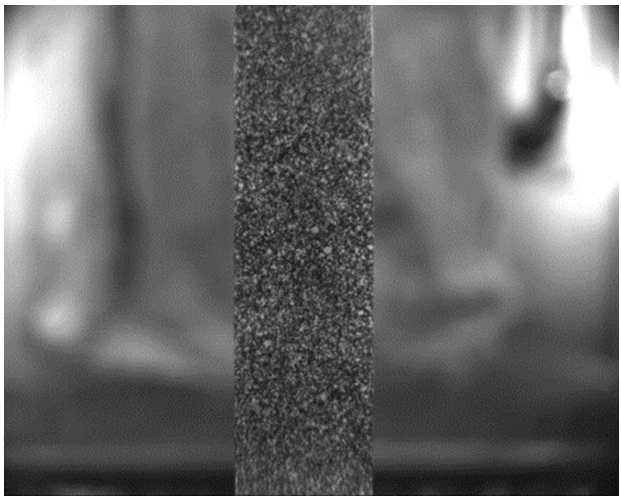
The self-correlation experiment is proposed by Z.Y. Wang et al [12]. It acquires two images by CMOS without moving the object. The first image is denoted by
is very similar to
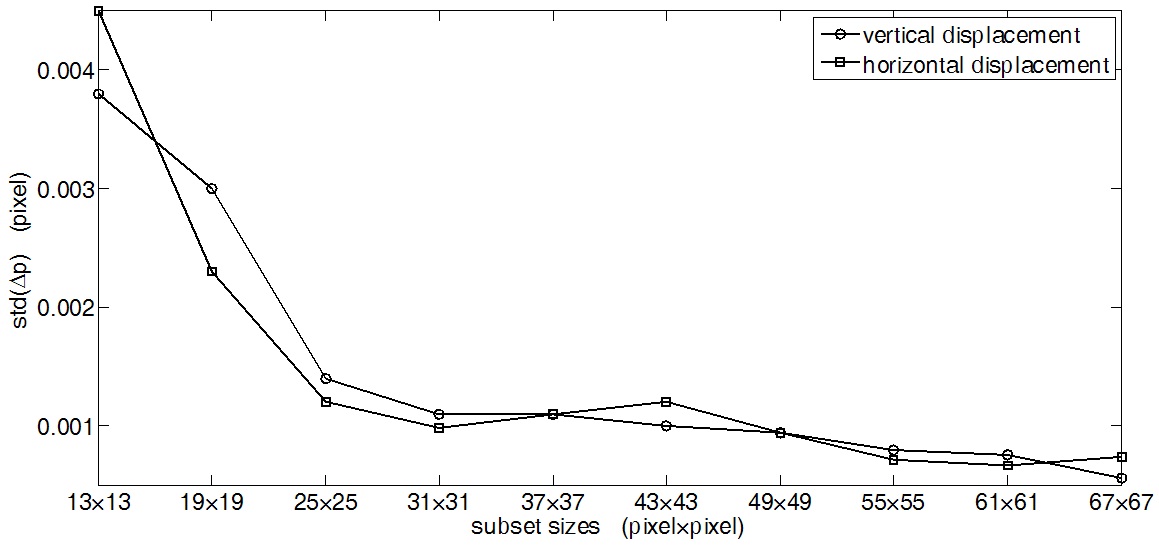
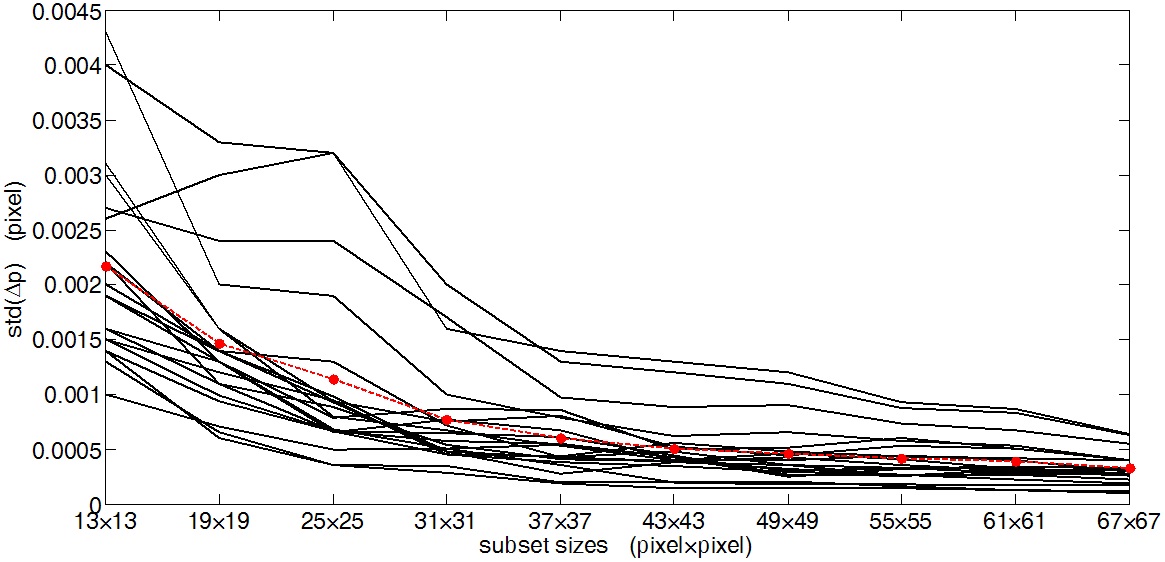
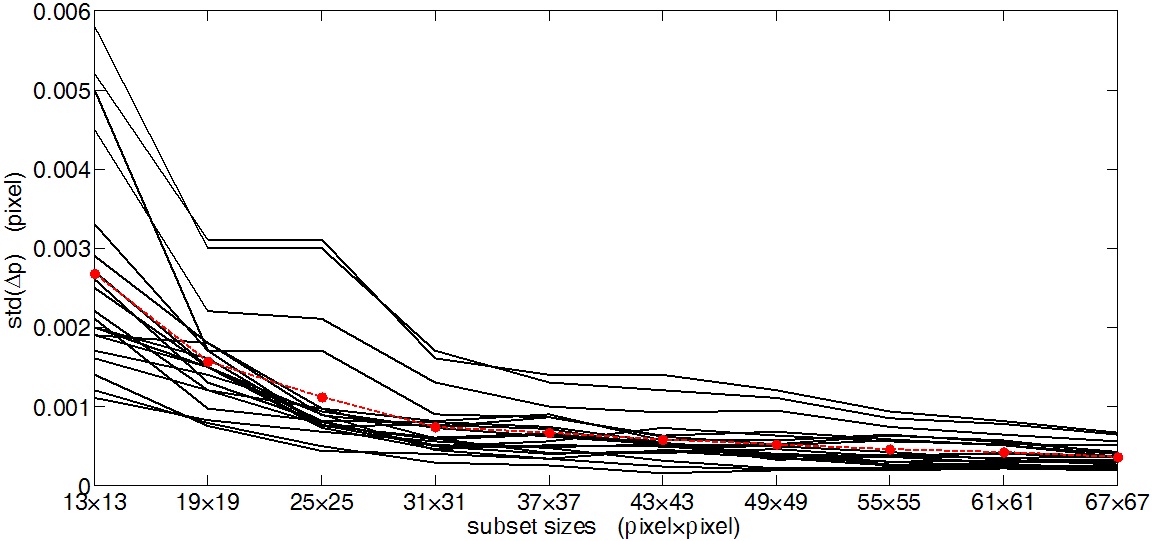
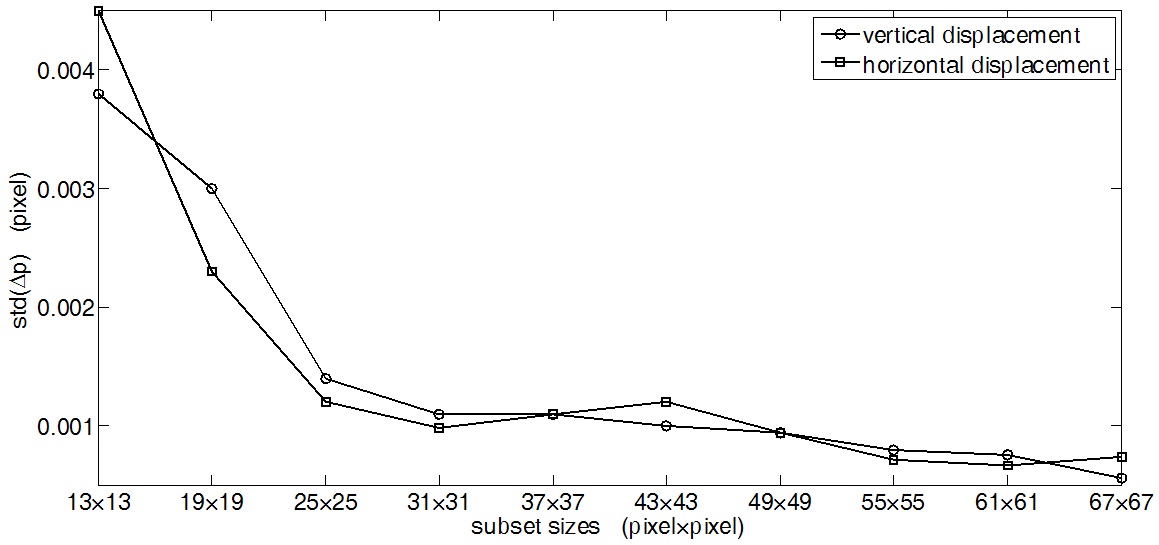
Figure 7 is the results concerning both the vertical and horizontal displacement estimation errors, it shows that the displacement estimation error decreases when subset size increases. For different directions, the power-law relationship observed roughly for
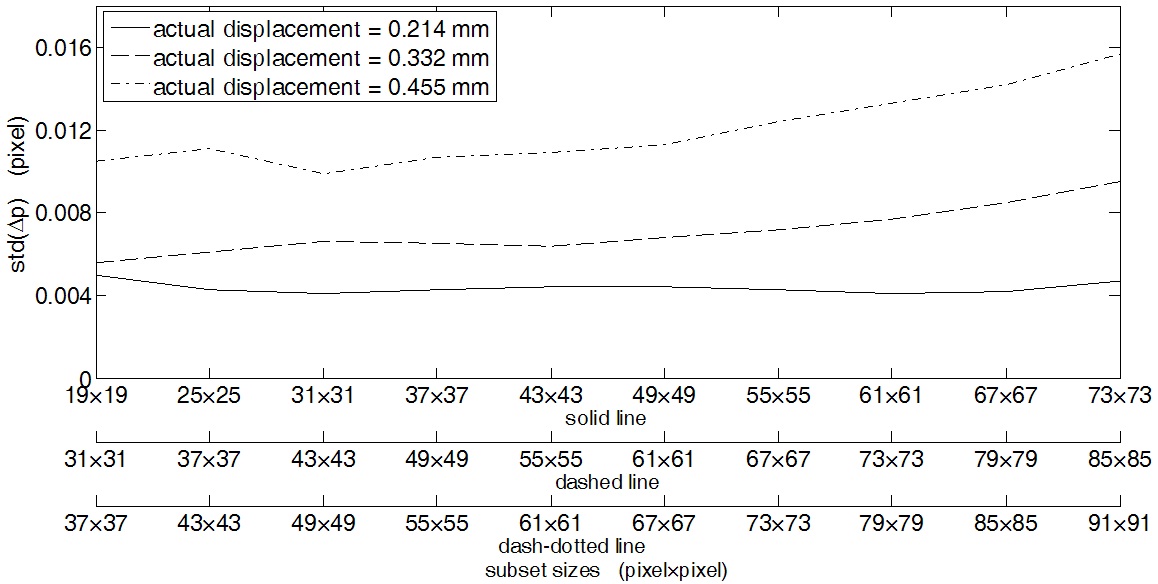
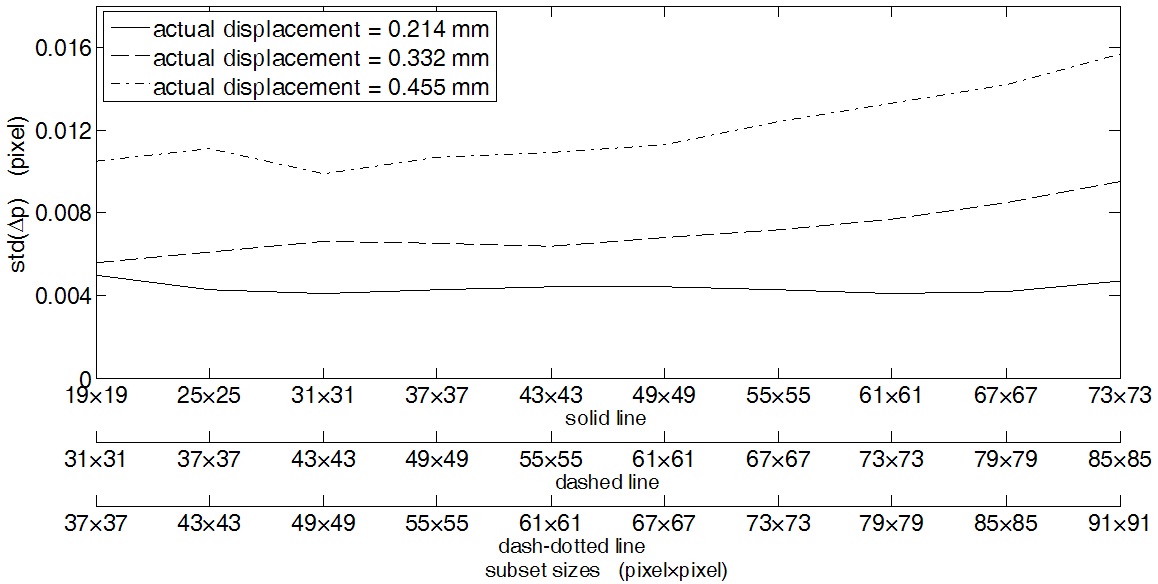
In this section, the specimen is the same as the one used in the self-correlation experiment. The sample is attached to the universal material experimental machine with a translation accuracy of 2 μm. Three images of the speckle pattern with a given vertical direction rigid body translation (0.214 mm, 0.332 mm and 0.455 mm respectively) are captured by the same CMOS-based digital image acquiring system.
The mean displacement of the rigid body translation calculated by DSCM is 16.2653 pixels, 25.3415 pixels and 34.9853 pixels, respectively. Clearly, there is a linear relationship between actual displacements (
and calculated displacements (
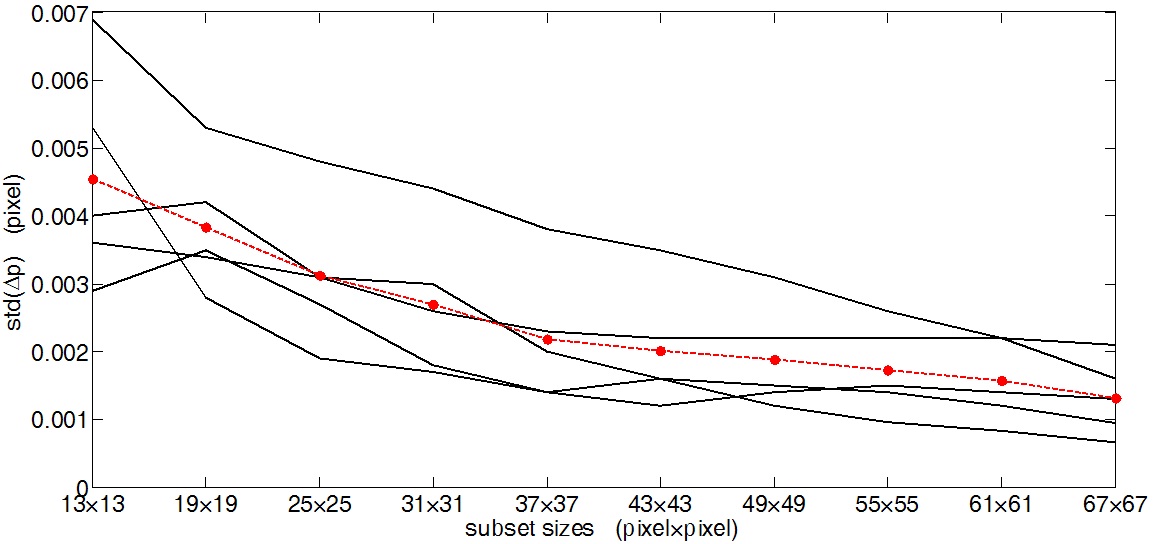
Figure 8 shows the standard deviations of displacement estimation error
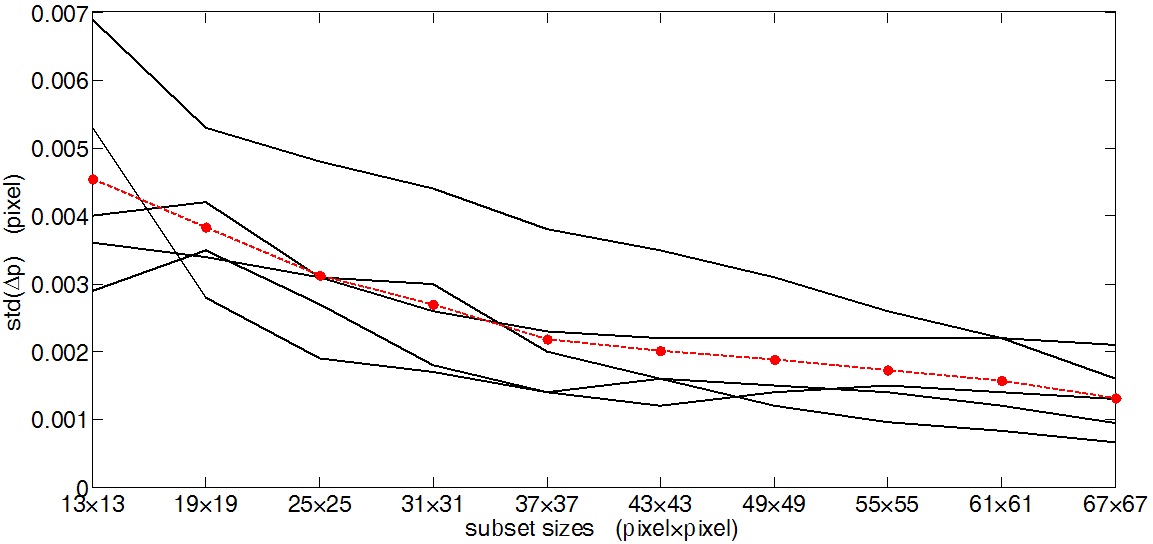
Rigid body translation experiment was re-run. The sample is attached to the universal material experimental machine. Five images of the speckle pattern with a given vertical direction rigid body translation (0.008 mm, 0.015 mm, 0.023 mm, 0.030 mm and 0.035 mm respectively) are captured by the CMOS-based digital image acquiring system. Fig. 9 shows a summary of the standard deviation in displacement estimation error
The power-law relationship observed roughly for the average values of
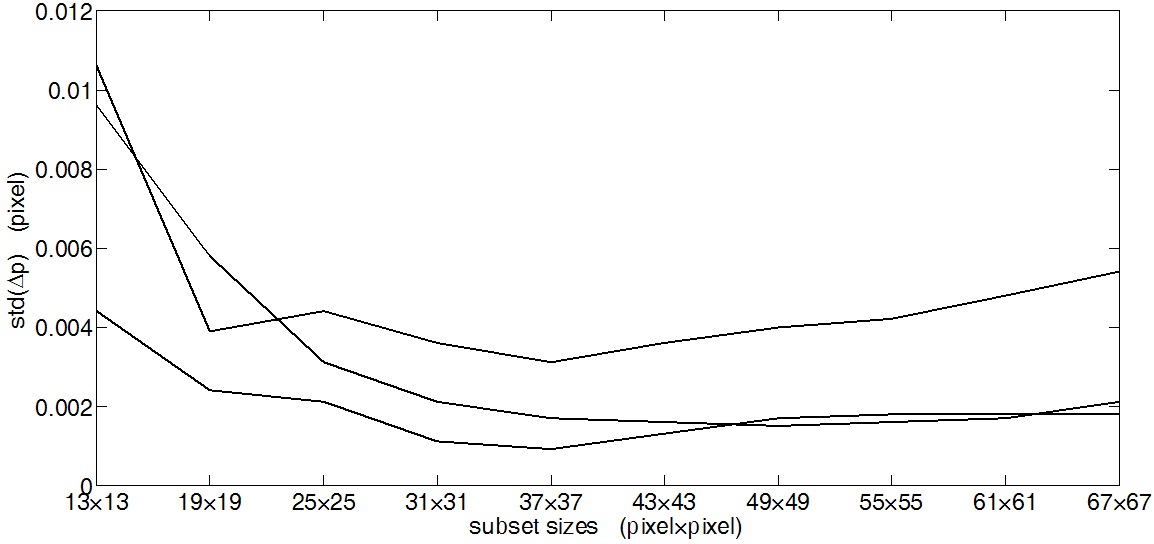
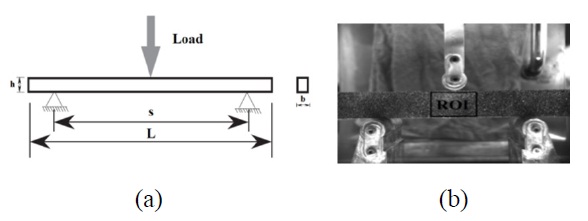
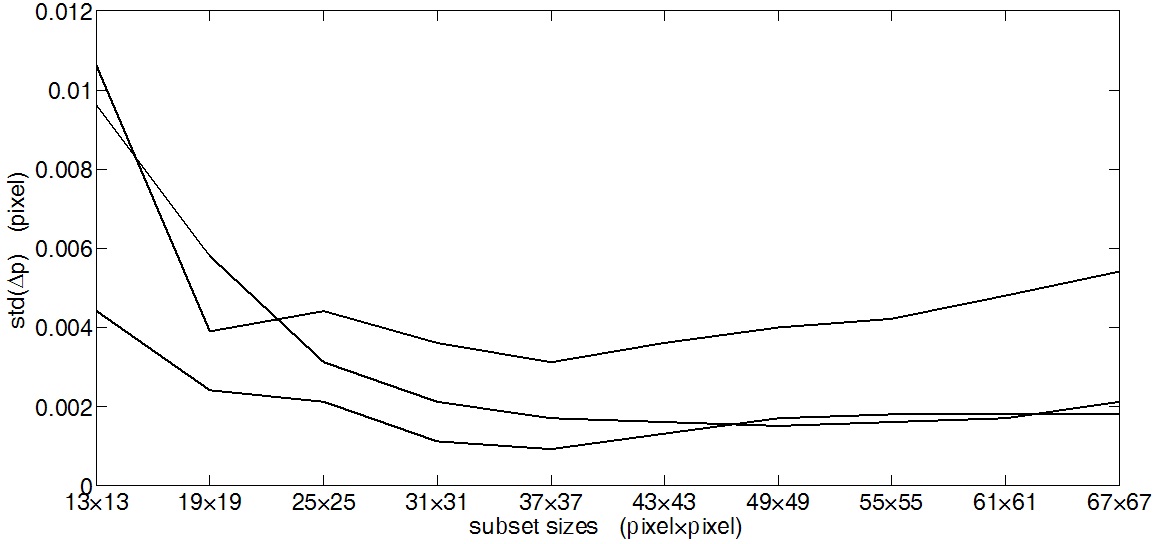
In this section, a three-point bending test of a steel specimen was carried out. The dimensions of the three-point bending specimen are shown in Fig. 10. The experimental device was a universal material experimental machine. First, the specimen was recorded before loaded as the reference image. Then a load
The power-law relationship observed previously for std (Δ
Deformation estimation errors by DSCM have been reformulated with an explicit representation of the image grayscale error Δ
The sub-pixel interpolation error and image noise error would always be present and they can be affected by the actual image intensity profile characteristics and deformation field characteristics [12]. Nevertheless, the image grayscale error due to sub-pixel interpolation and image noise in the simulated image pairs analyzed in this study were relatively small (the average values of
Several assumptions were made to obtain the power-law relationships on the variances of displacement errors. Those assumptions might not all strictly apply to any real experimental conditions, even numerical simulation. Pan et al. extended the error analysis of two-dimensional motion estimation [4] to include detailed analyses on bias in displacement estimation when random white noise existed in both reference and current images. Their results showed the bias in displacement measurements depends on both the variance of image noise and Sum of Square of Subset Intensity Gradients (SSSIG). But the effect of possible subset shape mismatch was not considered by them. If the image noise ([Δ

Equation (21) becomes identical to Equation (18) and (19) given by Pan et al. in [4]. Similarly, Equation (21) provides a criterion for subset size selection in DSCM. For certain CMOS-based digital image acquiring system, the image noise can be accurately quantified by self-correlation experiment mentioned above. The displacement measurement accuracy can be controlled by adjusting the value of SSSIG [4], which can be increased or decreased by adjusting the subset size. Furthermore, Equation (20) leads to a simple criterion for choosing a suitable subset size, image quality, sub-pixel algorithm, and subset shape function for DSCM for the desired measurement precision.
Deformation measurement errors of gradient-based DSCM analysis have been presented in terms of sub-pixel interpolation error, image noise, and subset deformation mismatch. A new formulation is used to explicitly account for the image grayscale error due to above three error sources at each point of the subset. Numerical and experiment results of error estimation are presented to validate the analytical formulas on the standard deviation of displacement measurement errors. It has been shown that 1) Deformation measurement errors are directly linked to the image grayscale error at each point of the subset; 2) The standard deviation of displacement measurement errors