Composite materials have been widely used in various areas due to their light weight and high specific strength and modulus (Baker et al., 2004; Park et al., 2009). An attractive property of composite materials is the possibility of tailoring the laminate with desired angles, which is not possible in conventional metals. A suitable lay-up stacking sequence can improve the resistance of the laminate without increasing the number of plies. Optimization of the stacking sequence is therefore necessary in the design of the composite parts.The angle of composite plies is usually distinct, such as 0, 30, 45, 60, or 90 degrees, for practical manufacturing.This engenders optimization problems with discrete or discontinuous variables.
Methods for discrete variable optimization have been developed over several decades. These can be classified into six categories (Arora et al., 1994): branch and bound,simulated annealing, sequential linearization, penalty functions, Lagrangian relaxation, and other methods such as rounding-off, heuristic, cutting-plane, pure discrete,and genetic algorithms. Each method has advantages and disadvantages depending on the problem type.
While conventional methods use a single point at each iteration, genetic algorithms are population-based approaches. The basic aim of a genetic algorithm is to generate a new set of designs (population) from the current set in order to improve the average fitness of the population(Arora, 2004). Genetic algorithms are global-search approaches that can find global optima and have been widely used for optimizing composite structures. Kogiso et al.(1994) applied a genetic algorithm to the stacking sequence optimization of laminated composite plates for bucking load maximization. They confirmed that their improvements significantly reduced the number of analyses required for genetic optimization. Lin and Lee (2004) proposed a precise regression so that the local improvement, which helps a genetic algorithm to converge sooner, could be done within a very short time. Walker and Smith (2003) described a technique for the multi-objective optimization of laminated composite structures. Soremekun et al. (2001) investigated the standard genetic algorithm with an elitist method, which was first implemented by De Jong (1975), demonstrating that it could not find multiple global optima through a specific example. They made modifications in order to improve the standard process.
Researchers have investigated the behavior of composite parts under high velocity impact through analytical methods, numerical methods, and experiments. Chen et al. (1997) used a smoothed particle hydrodynamics technique in conjunction with a macro-homogeneous, anisotropic material concept for simulating impact damage and penetration of composite structures. Van Hoof (1999) conducted experiments to examine the deformation response of materials used in ballistic helmets. In addition, a numerical analysis was conducted and compared with the experiment. Fujii et al.(2002) experimentally investigated the impact perforation behavior of various carbon-fiber-reinforced plastic laminates impacted by steel spheres with a velocity of 500-1,230 m/s.Chambers et al. (2007) evaluated the impact damage in carbon fiber reinforced plastic (CFRP) using embedded fiber Bragg grating sensors, C-scan, and microscopic analysis.Gower et al. (2008) carried out experimental and numerical studies to determine the ballistic response of laminated Kevlar29 and 129. Naik and Shrirao (2004) investigated the ballistic impact behavior of plain weave E-glass/epoxy and twill weave/epoxy composites. Talebi et al. (2009) studied the projectile nose angle of impact and penetration into high strength fabric. Normal and oblique impacts on thin woven laminates were investigated by Lopez-Puente et al. (2008)through experimental and numerical analyses. Damage area, especially the range of delamination, was found to increase with the projectile initial velocity for both normal and oblique impacts when the impactor velocity was below the ballistic limit and vice versa. Will et al. (2002) studied the effect of stacking sequence of CFRP filament wound tubes subjected to projectile impact.
However, the number of optimization studies of impact dynamics on composite structures is limited. This may be due to the numerical cost of impact simulations. In addition,the simulation of high velocity impacts is still a complicated issue and requires more effort to be fully developed.Chen (2001) introduced a practical approach for impact structure and crash-worthiness optimization. The approach took advantage of the global-searching ability of genetic algorithms while also considering the instability of explicit
finite element analysis. Recently, Yong et al. (2008) adopted a genetic algorithm to optimize the response of a composite laminate due to impact. The genetic algorithm was coupled with the explicit finite element package LS DYNA (Livermore Software Technology Corporation, Livermore, CA, USA) to perform the impact analyses.
A ballistic helmet, as a specific example, must efficiently prevent penetration to ensure that brain damage does not occur. In this case, energy absorption and backplane displacement of the helmet are important factors. The current study focuses on the application of a genetic algorithm available in LS-OPT (version 3.3; Livermore Software Technology Corporation) (Stander et al., 2008) to minimize the maximum backplane displacement of a laminated panel subjected to a high velocity impact by optimizing its stacking sequence.
The problem is formulated as
Find: stacking sequence [θ1, θ2, θ3,…θ19] of the laminate,where θi is the angle of an individual woven composite ply.
to minimize: maximum backplane displacement of the laminate (1)
subject to: Impact velocity: 483m/s 0° ≤ θi ≤ 90°
We used LS DYNA (version 971) (Livermore Software Technology Corporation, 2008) for the backplane displacement evaluation. We performed various numerical tests to investigate the effects of parameters in the genetic algorithm, such as population size, type of variables,mutation probability, and a set of discrete variables. We made a finite element model by using shell elements for the composite plate. In addition, we conducted another test using a sequential response surface method for comparison.This is the preliminary result of a project that intends to develop an efficient modeling methodology for high velocity impacts to composite laminates.
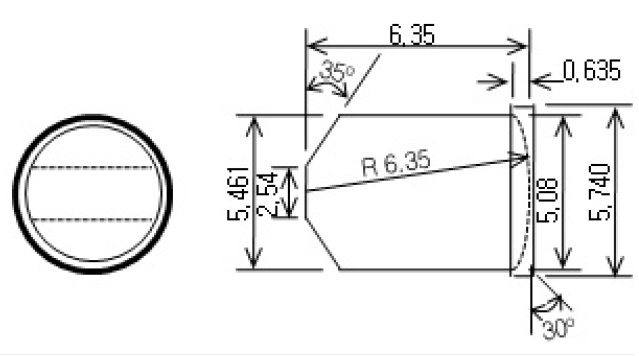
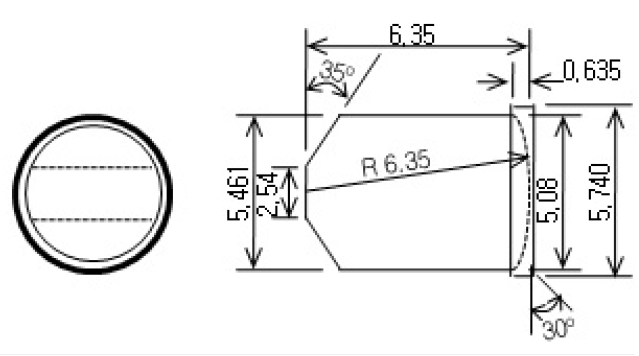
The finite element model was generated based on the work of Van Hoof (Van Hoof, 1999). Van Hoof’s study described two different Fragment Simulation Projectiles (FSPs): the first was the 0.22 calibre FSP weighing 1.1 g, and the second was the 0.30 calibre FSP weighing 2.8 g. The impactor was highly pressured to hit a Kevlar29 laminated panel fabricated in accordance with the military specification MIL-H-44099A.The panel had dimensions of 101.6 mm × 152.4 mm and a thickness of 9.5 mm with 19 plies laid up. The dimensions of the projectile are shown in Fig. 1. Because the simulation of the impact problems and optimization are costly jobs, the current study intended to optimize the stacking sequences of the laminates impacted by the 0.22 calibre FSP only.
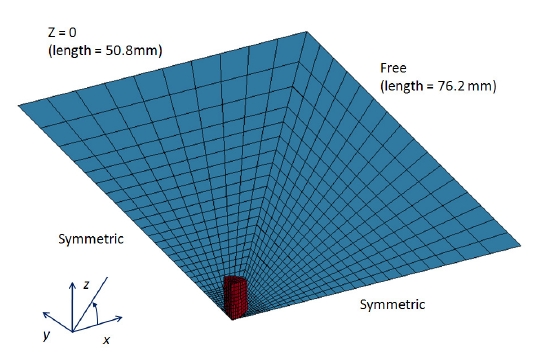
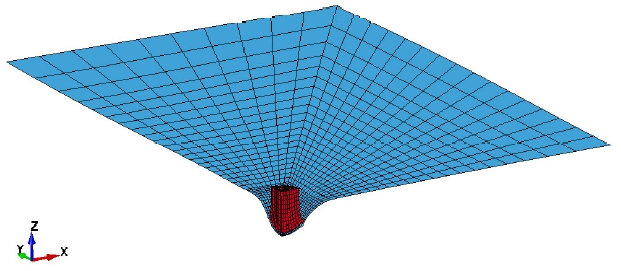
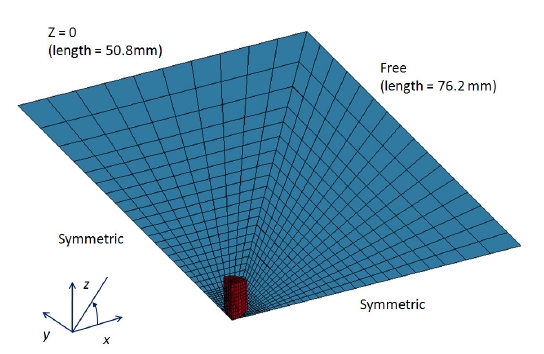
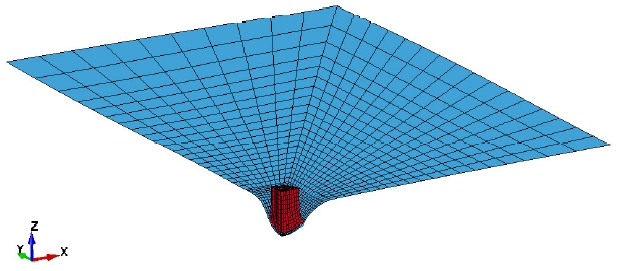
The finite element model used is shown in Fig. 2. Due to the symmetry of the panel and the projectile, a quarter of the panel was generated to reduce the analysis time.The projectile was modeled using solid elements, and the composite panels were generated with shell elements.Material number 59 (MAT #59) in LS DYNA was applied to model the composite plies. Even though the solid element is preferred in the modeling of the composite panel because the solid element can represent thickness effects and delamination, modeling and analysis using solid elements
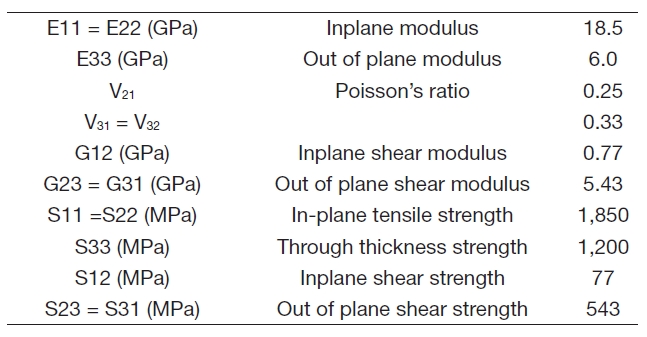
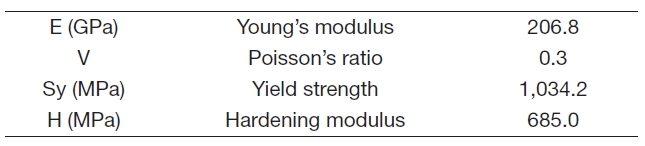
of even one simulation require significant effort. In addition,an optimization process requires many iterations in order to reach optimal results, and is definitely a costly task.Therefore, shell elements, which can be less accurate but are more economical, are chosen in the current study. The initial projectile velocity was set to be 483 m/s. The duration time in the analysis was 0.2 ms. The material properties of the projectile and Kevlar29 are given in Table. 1 and 2 (Van Hoof, 1999).
[Table 1.] Material properties of Kevlar29 (Van Hoof 1999)
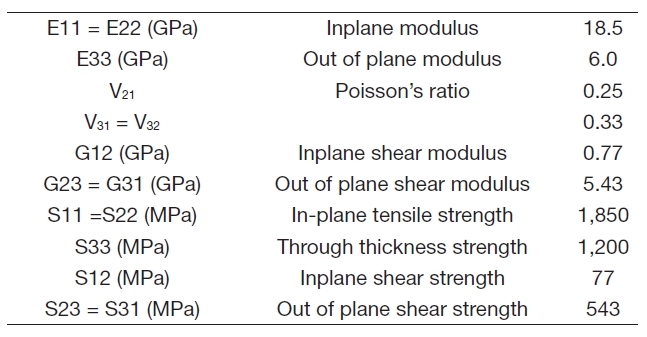
Material properties of Kevlar29 (Van Hoof 1999)
[Table 2.] Material properties of projectiles (Van Hoof 1999)
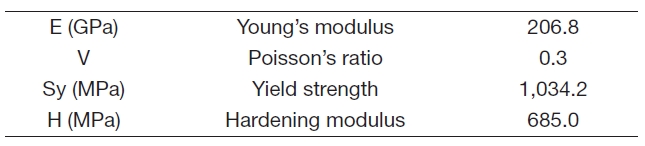
Material properties of projectiles (Van Hoof 1999)
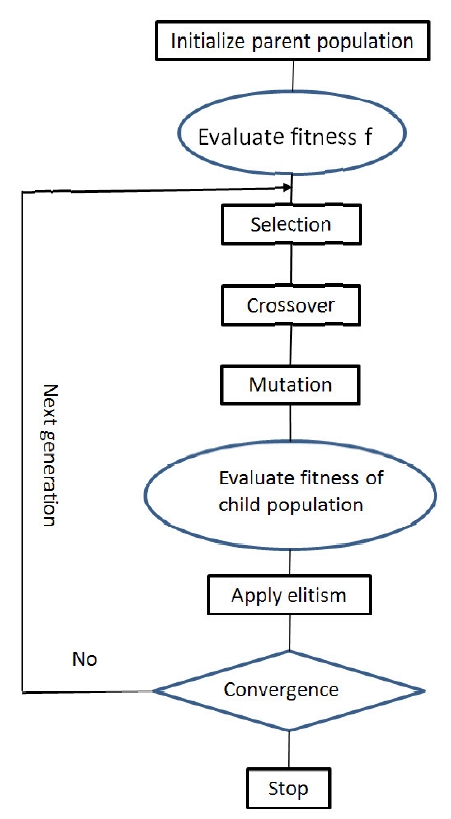
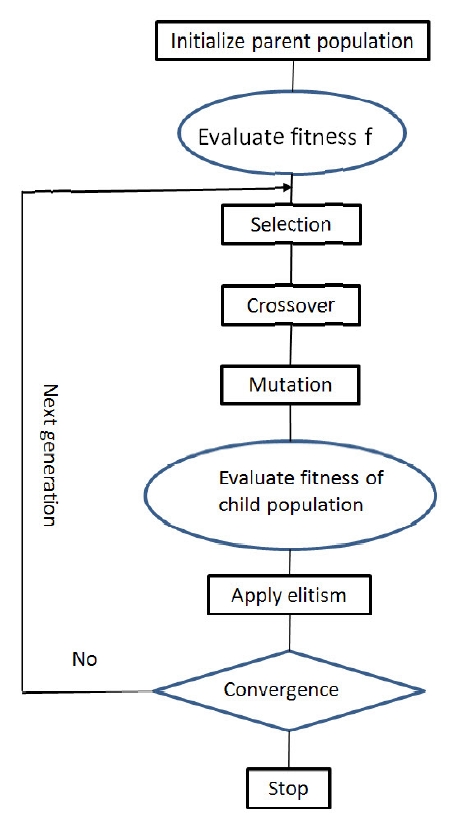
The basic steps in a genetic algorithm in LS-OPT are illustrated in Fig. 3. First, the population with a predetermined size is randomly initialized with randomly generated binary chromosomes. There are 19 discrete variables that correspond to 19 different orientations of composite plies. The orientation of a single ply corresponds to a discrete value in the set of 0, 30, 45, 60, and 90 degrees,which is commonly used in a lay-up process.
Next, the objective function (backplane displacement) is evaluated using the analysis package LS DYNA. Then, the tournament selection available in LS-OPT is used as the selection operator. A single-point binary crossover is used for the binary encoding of the individuals, and a single binary mutation is carried out for the mutation process. A complete cycle of selection, crossover, and mutation results in a child population. The population size is kept constant for both parent and child populations. However, high-fitness individuals may be lost while creating a child population from the parent population. Therefore, an elitism process,which replaces the worst individuals in the child population by the best individuals in the parent population, is applied in the optimization. We ran test cases with different genetic algorithm parameters. These cases and the assigned parameters are given in Table 3. In addition to the genetic algorithm, we use the sequential response surface method(SRSM) in LS-OPT for comparison. When using the SRSM,we apply D-Optimal design for experimental sampling.
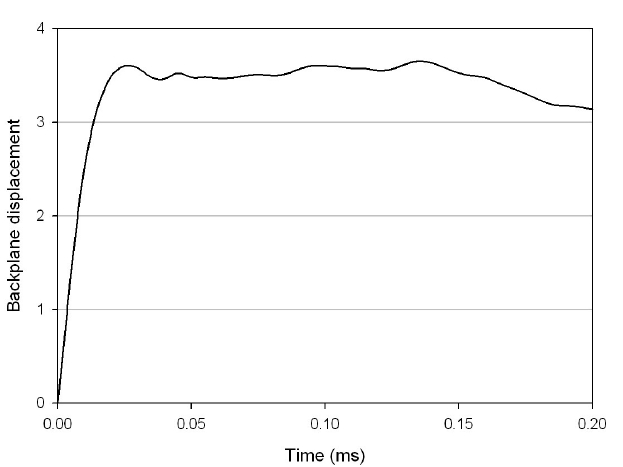
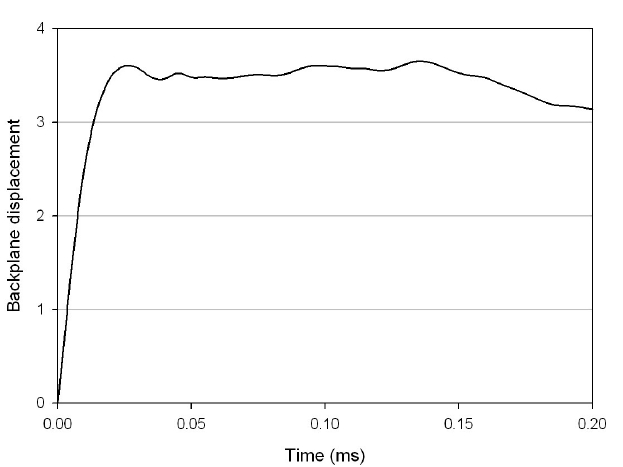
A typical displacement history of the panel center in 0.2 ms after the impact, where the maximum displacement occurs at around 0.025 ms, is shown in Fig. 4 with a stacking sequence of [45o]19. At the beginning of the time period of interest, the panel center point’s displacement increased rapidly. The maximum displacement was numerically found to be 3.6 mm. The deformations of the panel at the time of 0.1 ms and 0.2 ms are shown in Fig. 5.
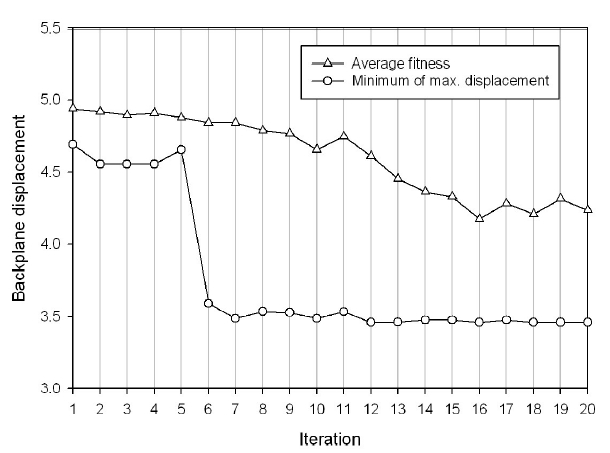
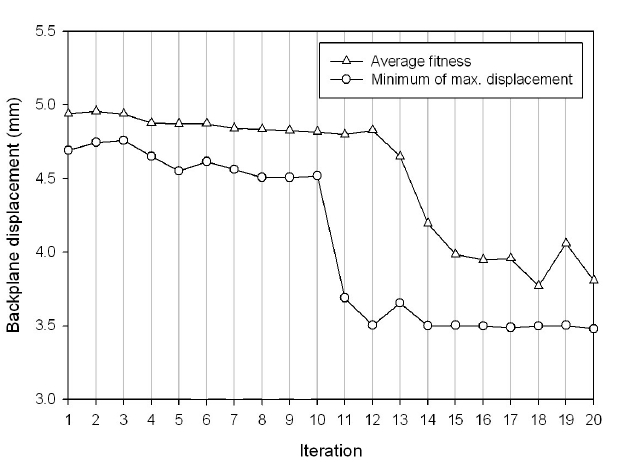
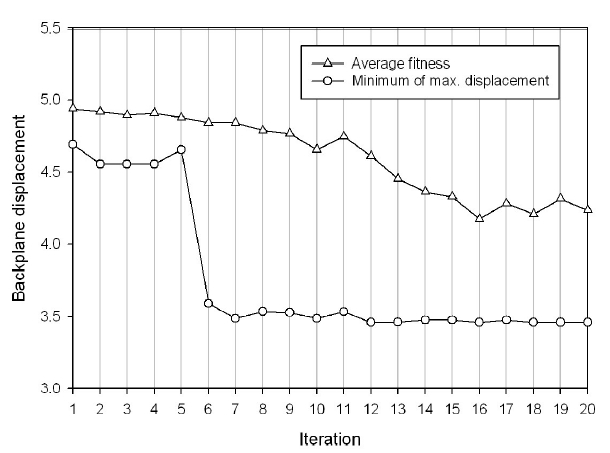
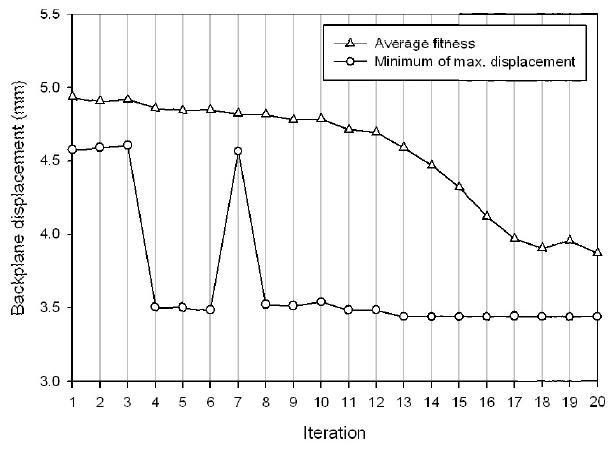
The optimization history of Test 1 is shown in Fig. 6. The average fitness (average maximum displacement) gradually decreased when the iteration number increased. It shows that the characteristic of genetic algorithms tends to improve the average fitness of the population.
The history of the minimum of the maximum displacement showed a drop point at the 6th iteration. After this, the displacement did not substantially change. The optimum point was found at the 16th iteration. Even though the last iteration (20th) had the highest average fitness, the minimum of the maximum displacement of this iteration was slightly lower than that of the 16th iteration. This indicates that the last iteration is not equivalent to the iteration with the optimal stacking sequence.
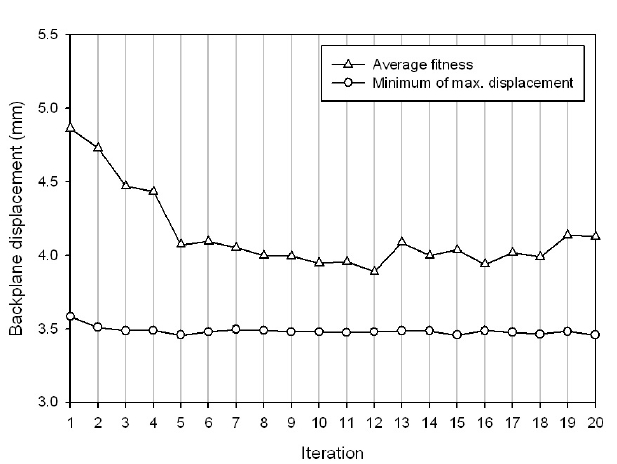
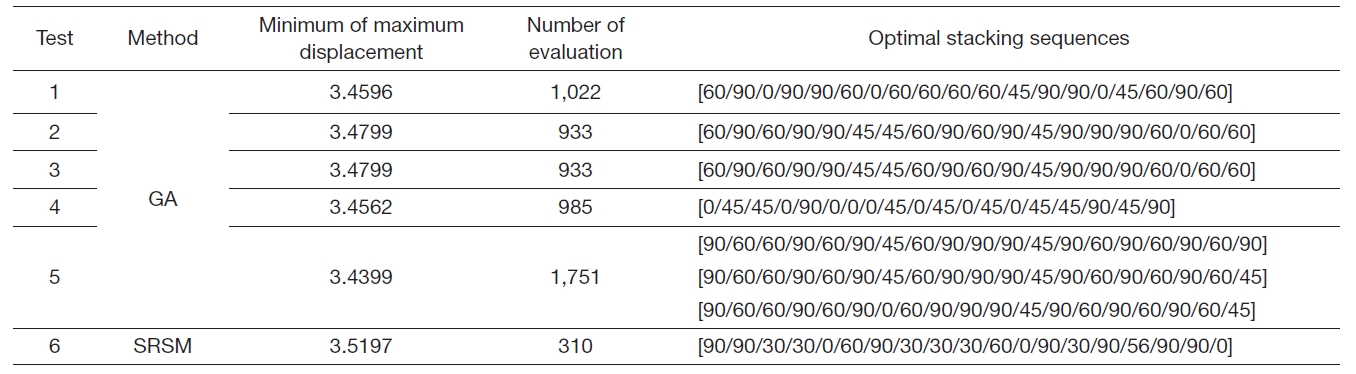
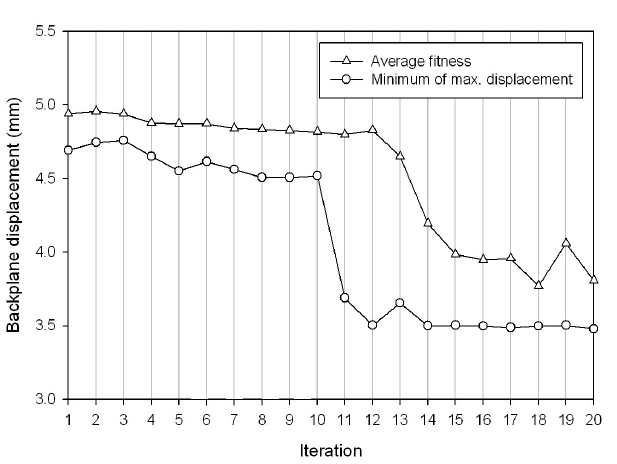
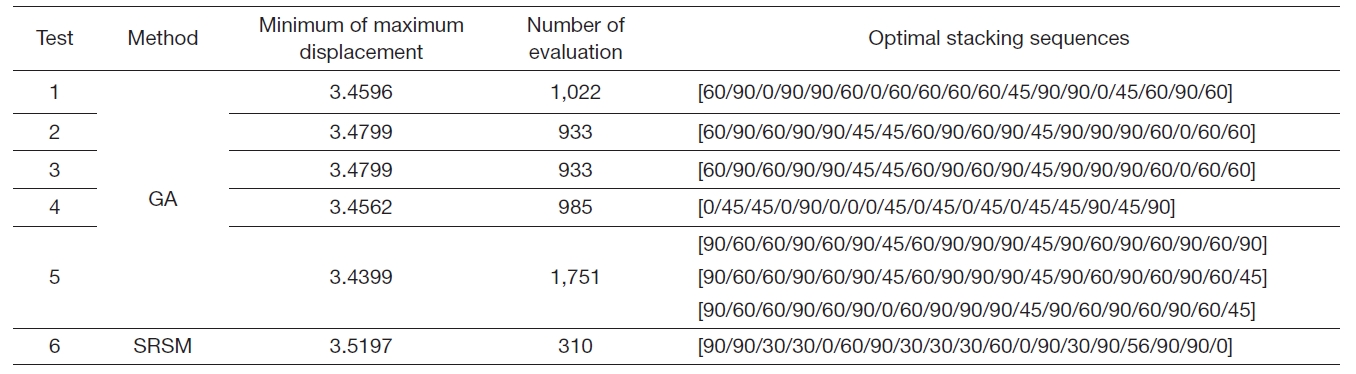
The optimization history of Test 2, using binary variables instead of real variables, is shown in Fig. 7. As shown in the figure, the average fitness also increased with an increase in iterations. There is also a drop in the maximum displacement history curve. However, the drop occurs later than that in Test 1. The use of binary variables instead of real variables,therefore, led to a slower convergence rate. In addition, the final optimization result obtained with binary variables is nearly the same as that with real variables, 3.4596 mm and 3.4799 mm, as shown in Table 4.
Test 3 investigated the effect of the mutation probability.
The mutation probability is 25%, which indicates that three bits undergo the mutation (the number of bits assigned to a binary variable is 15, as a default in LS-OPT). However, the optimization result given in Table 4 shows that the mutation probability does not affect the results in at least these two tests. That is why the optimization history for Test 3 is not shown in this paper.
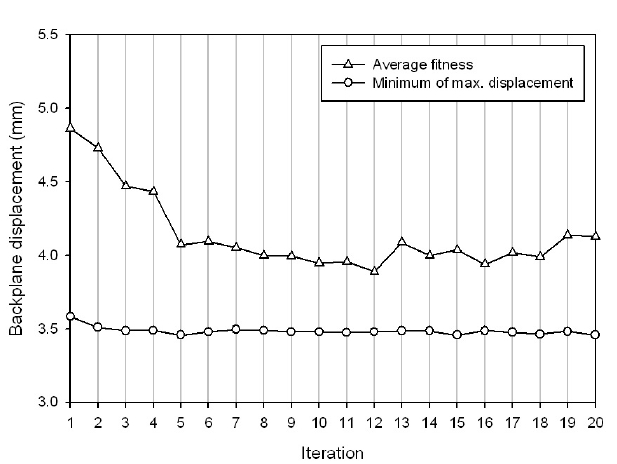
Test 4 also examines the influence of the number of discrete variables. The optimal result, which was obtained with a set of three discrete variables, 0, 45, and 90 degrees (Test 4),is quite similar to that obtained with a set of five values, as shown in Table 4. However, the average fitness decreases faster in Fig. 8. In addition, the optimal stacking sequence is obtained early in the first iterations. Many discrete variables
[Table 3.] Test cases with assigned parameters

Test cases with assigned parameters
[Table 4.] Optimization results
Optimization results
result in a highly diverse population. However, a reduction in the number of discrete variables does not seem to affect the optimal result in this case. The multiple global optima might be a reason for this. There can be many global optima,and the combination of three discrete angles, 0, 45, and 90 degrees, can also result in some of these optima. In addition,the model considered only two-dimensional elements of the composite panel and neglected the delamination problem,which is strongly related to the stacking of different angle plies. It is thought that if delamination is considered, the effects of the number of discrete variables can be shown more clearly.
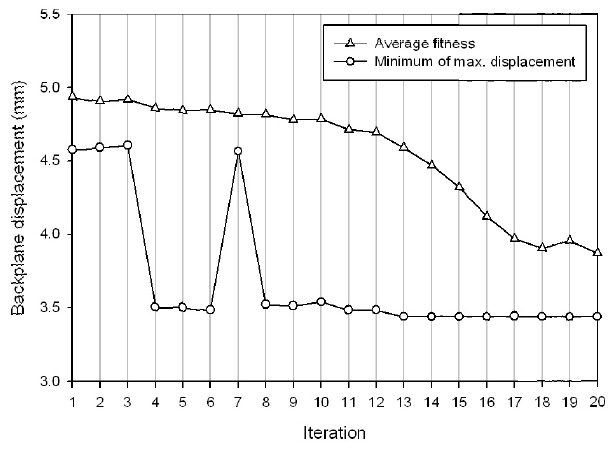
An increase in the population size can improve the optimal solution. Figure 9 shows the optimization history with a population size of 100. There is a jump in the backplane displacement at the 7th iteration, but the average fitness is still improved with the iteration. As shown in Table 4, the optimization result improves when the population size increased from 58 to 100. The minimum of the maximum displacement decreaseed by about 0.6%, reducing from 3.4596 mm down to 3.4399 mm, but the number of finite element evaluations was nearly 1.7 times larger (increasing from 1,022 to 1,751). Obviously, an increase in the population size significantly increases the optimization cost. Different stacking sequences can give the best fitness. The optimal result of Test 5 was found with three different stacking sequences, given in Table 4. This suggests the possibility of multiple optima of the current optimization problem.
Test 6 was done with the application of the sequence response surface method instead of the genetic algorithm for comparison. As shown in Table 4, although the minimum of the maximum backplane displacement obtained is slightly larger than that obtained using the genetic algorithm, the number of fitness evaluations is much lower. Consequently,the SRSM could be a candidate in conceptual design to save time.
We used a genetic algorithm available in LS-OPT, a commercial program, to optimize the stacking sequence of composite laminates in order to minimize the backplane displacement when subjected to a high velocity impact. We used an explicit finite element package, LS DYNA, for the fitness evaluation in the algorithm. We performed several tests with different parameters in order to investigate the effect of population size, variable type, and mutation probability. We carried out an additional test with the sequential response surface method in LS-OPT for comparison.
The results show that the use of real variables in LSOPT can yield a higher convergence rate than the use of binary variables. An increase in population size improves the optimization result, but the analysis cost increased significantly. When the population size increased from 58 to 100, the number of finite element evaluations increased by nearly 1.7 times, and the improvement was only 0.6% in the current study. An increase in the number of discrete variables from three to five values in this study does not make a large difference in the optimization results. The multiple optima characteristics of the problem and the lack of consideration of the delamination phenomenon in the current model may account for this result. Consequently, a three-dimensional analysis is recommended in future studies.