This study examines the difficulties and alternatives of R-learning application in early childhood institution. A delphi research was conducted three times on 20 experts in early childhood education. The findings of this study were as follows: First, the difficulties of R-learning were found including limitation of software, and hardware, uncomfortable A/S system, lack of teacher training and educational resources. Second, the alternatives of solving problems of R-learning were selected such as A/S system construction, supporting software for Robot based learning, supporting fund from government. Suggestions for effective R-learning application in early childhood institution were provided.
로봇은 사람을 대신할 수 있는 어떤 것을 만들어 내기 위해 상상하고 노력해오는 과정에서 만들어지게 되었으며 학문적으로나 기술적으로 다양한 분야가 융합하여 탄생한 것이다. 로봇이 개발되어 삶 속에서 실용화되는 데 오랜 세월이 걸렸으나 1990년대부터 산업분야 뿐 아니라 건설, 원자력 발전소, 의료, 복지, 해양, 우주 등 으로 확대되면서 교육분야에 까지 활용되는 차원에 이르게 되었다. 특히, 로봇에 정보화 기술을 도입하여 단순업무를 반복하는 기계적 차원을 넘어선 지능형 로봇이 소개되면서 우리 삶에서 로봇 활용은 이제 선택이 아닌 필수가 되는 단계에 접어들었다. 이러한 로봇 기술의 발달과 함께 우리나라에서도 국가적 차원에서 “제 1차 지능형 로봇 계획”(한국과학기술위원회, 2009)을 제시하면서 지능형 로봇을 국가 전 분야에 적극적으로 활용하도록 권고하고 지원대책을 수립하였다. 이에 따라 교육과학기술부(2009)에서도 ‘유아교육선진화계획’ 아래 로봇기반 교육(R-러닝)을 소개하고 유치원 현장에 교사도우미 로봇 아이로비와 제니보를 배치하도록 지원하였다.
그동안 전자매체 가운데 컴퓨터가 주된 교육매체로 사용되던 유아교육 현장에 로봇이 소개되면서 로봇이 가진 교육적 가치와 장점에 대한 관심이 증가하게 되었다(이정욱, 박선희, 이민정, 임수진, 2010). 지능형 로봇은 사람이 가지고 있는 특성 가운데 다양한 감각을 통해 외부 정보를 입수하고 일정한 방식으로 설계된 과정을 통해 적절한 행동과 말을 하도록 되어 있는 로봇을 말한다(두산동아백과, 2008). 기존의 컴퓨터나 전자 매체와 달리 로봇은 인간과 유사한 외형을 갖추거나 동물의 모양을 가지고 있어서 유아들이 친근감을 느낄 수 있고 학습동기 유발이 가능하다는 장점을 갖추고 있다. 또한, 교육적 콘텐츠를 로봇에 장착하여 학습을 지원해 주는 역할을 할 수 있으며 교사가 유아에게 일방적으로 전달하는 방식이 아닌 양방향적 상호작용을 할 수 있도록 지원해 주는 기능을 갖추고 있다는 특징이 있다.
유아는 지능형 로봇이 가지고 있는 음성인식과 센서, 재현능력 등을 통해 효과적으로 정보를 주고 받을 수 있으며, 로봇에 장착된 교육 콘텐츠 활용은 유아가 학습 원리를 이해하고 지식과 개념을 효과적으로 습득하도록 도와줄 수 있다. 이러한 로봇의 다양한 기능과 특성으로 인해 유아교육 현장에서는 로봇을 교육에 활용 하는 것에 관한 관심을 가지게 되었으며 수업장면에서도 적극적으로 활용하게 되었다(박경희, 홍지명, 2010; 유혜숙, 2010).
새로운 교육매체로서의 로봇에 대한 특성을 활용하여 교육활동에 연결하려는 시도가 증가하면서 R-러닝이 도입되고 유아교육 학계와 현장에서는 R-러닝 관련 이론적 측면 및 실제적인 적용 방안과 효과검증에 관한 다양한 연구들이 이루어져왔다(이고은, 김경철, 2010; 이연승, 이민정, 강민정, 2014; 이정순, 유구종, 김민경, 2012; 이정욱, 이소정, 2013). 이를 구체적으로 살펴보면, 유아교육에 R-러닝을 적용하는 교육 프로그램이나 모형들은 공통적으로 유아들의 언어발달, 수학적 사고능력발달, 사회정서능력 발달, 신체표현 능력과 창의적 문제해결능력 증진에 긍정적 역할을 하는 것으로 나타났다(김경철, 박혜영, 2007; 김동춘, 이경옥, 방유선, 이영애, 이지영, 2013; 김상윤, 이민정, 안경숙, 김정희, 차영숙, 2012; 서경숙, 2008; 안경숙, 양지애, 2014; 유구종, 윤향실. 정상녀, 2011; 이현경, 서현, 2014; 지성애, 정재은, 2013; 최종욱, 2008). 또한, 최근에는 교실에서 로봇을 활용한 교육을 효율적으로 수행하기 위한 유아와 교사의 인식이나 교사의 전문성 향상을 위한 연구(이경옥, 이상희, 엄소명, 정다희, 2012; 이연승, 김규수, 서현, 2011)도 나타나고 있다. 유아들은 로봇을 친구처럼 친밀한 관계로 인식하고 로봇의 생김새, 감정을 나타내는 표정, 자율적이거나 타율적인 이동과 언어적 의사소통을 통해 많은 영향을 받고 있는 것으로 나타났다(손혜진, 2011; 현은자, 2012). 또한, 유아교사들은 처음에는 첨단 교육매체로서 로봇을 유아교육에 적용하는 것에 대해 부정적인 시각을 가지고 있었으나 로봇을 직접 교실수업에 활용해 가면서 점차 긍정적 시각으로 변해가고 로봇을 효과적 교수매체 가운데 하나로 인식하게 되었다. 그러나 아직까지 유아교사들은 R-러닝 전반에 대한 구체적인 개념과 지식을 가지고 있지 않아 새로운 교수매체인 로봇과 로봇 활용 교육에 대한 적극적 탐색과 활용은 이루어지지 않고 있다. 또한, 로봇의 특성과 기술적인 측면에 대한 이해도가 부족하며 로봇을 활용한 교육 콘텐츠에 대한 이해도도 부족하고 질높은 교육 콘텐츠 도 부족한 편이다. 따라서, 유아교사의 로봇을 활용한 수업에 관한 자신감과 관련되는 교수효능감은 매우 부족한 실정이다(이연승, 강민정, 박선미; 2013; 이연승, 정지현, 강민정, 박선미, 김창환, 2013; 정한울, 한수정, 2012).
이와 같이 유아교육기관에 로봇을 활용한 교육이 더욱 활성화되기 위해서는 R-러닝 전반에 관한 연구들이 다양하게 수행되는 것이 필요하지만 유아교사들이 교실에서 R-러닝을 실행하면서 겪게 되는 어려움과 방해요인에 대해 알아보고 이에 대한 해결방안과 대안을 찾는 것이 매우 중요하다(김경철, 박성덕, 김은정, 2010; 유미열, 김경철, 최연철, 장연주, 2012; 윤현민, 2010; 이연승, 강민정, 박선미, 2013; 이연승, 임수진, 최진령, 2014). 따라서, 본 연구에서는 유아교육 학계와 현장의 전문가들을 대상으로 델파이 조사를 실시함으로써 전문가와 교육구성원의 의견을 수렴하고 종합하여 정리함으로써, 유아교육기관에서 R-러닝을 실행하는데 어떤 어려움이 있는지 밝혀내고 이에 대한 해결방안을 살펴봄으로써 향후 R-러닝이 효율적으로 적용되기 위한 시사점을 찾아보고자 한다.
본 연구에서는 유아교육기관에서 적용하는 R-러닝 교육의 방향을 모색하고자 유아교육 전문가들로 구성된 패널들의 의견을 수렴하고 이들의 의견을 직관적으로 판단하고 정리하는 델파이 기법(이종성, 2001)을 이용하였다.
본 조사에 참여한 최종 전문가 패널은 유아교육 및 보육 분야의 전문가 20명으로 구성되었다. 패널의 선정은 해당 분야의 경력, 연구업적, 직위 등의 사전평가를 통한 전문성 검정방법으로 이루어졌다. 학계 15명, 현장 11명, 총 26명의 R-러닝 관련연구 또는 관련 경험이 있는 전문가로 선정되었으며, 1, 2, 3차를 걸쳐 총 20명의 전문가가 본 조사에 참여하였다,
본 연구의 도구는 1차 개방형 질문과 이에 대한 응답으로 작성한 2, 3차 조사지를 활용하였으며, 각 횟수의 조사지는 다음과 같다.
1차 델파이 조사지는 ‘유아교육기관에서 R-러닝을 적용할 때의 방해요인은 무엇이라고 생각하십니까?’, ‘유아교육기관에서 R-러닝을 적용할 때의 방해요인에 대한 해결방안은 무엇이라고 생각하십니까?’의 개방형 질문을 통해 델파이 패널들이 편견이나 선입견 없이 자신의 견해를 보다 자유롭게 기술하도록 하였다. 예비조사 결과 관련분야의 전문가라 할지라도 R-러닝의 개념이 생소하여 접근하기 어렵다는 의견이 제기되어 관련 선행연구들을 첨부하여 델파이 패널의 이해를 돕고자 하였다.
2차 델파이 조사지는 1차 조사결과 추출된 유아교육기관의 R-러닝 적용 시 방해요인 및 해결방안의 적절성을 검증하기 위해 작성되었다. 유아교육기관의 R-러닝 적용의 장점, 방해요인 및 해결방안에 대해서 1차 조사결과 추출된 요소들의 중요도를 5점 리커트척도(전혀 중요하지 않다=1점∼매우 중요하다=5점)로 평정하도록 하였다. 각 문항 끝에는 1차 조사에서 R-러닝 적용 시 방해요인 및 해결방안을 언급한 전문가의 수와 답변의 예를 제시하여 각 항목의 중요도에 대한 의사결정에 참고할 수 있도록 하였으며, 수정 및 보완사항에 대해 의견을 기술하도록 하는 개방형 질문을 포함하였다.
3차 델파이 조사지는 2차 조사결과에 따라 수정된 유아교육기관의 R-러닝 적용의 방해요인, 해결방안에 대하여 다른 전문가들의 의견을 참고할 수 있도록 각 문항의 평균과 사분범위를 제시하여 각 항목의 중요도를 재평가하도록 하였으며 2차 조사와 마찬가지로 수정 및 보완사항에 대해 의견을 기술하도록 하는 개방형 질문을 포함하였다. 2, 3차 델파이 조사도구의 신뢰도는 <표 1>과 같다.

2, 3차 델파이 조사도구의 신뢰도
본 연구는 예비조사, 1, 2, 3차 델파이 조사로 진행되었다.
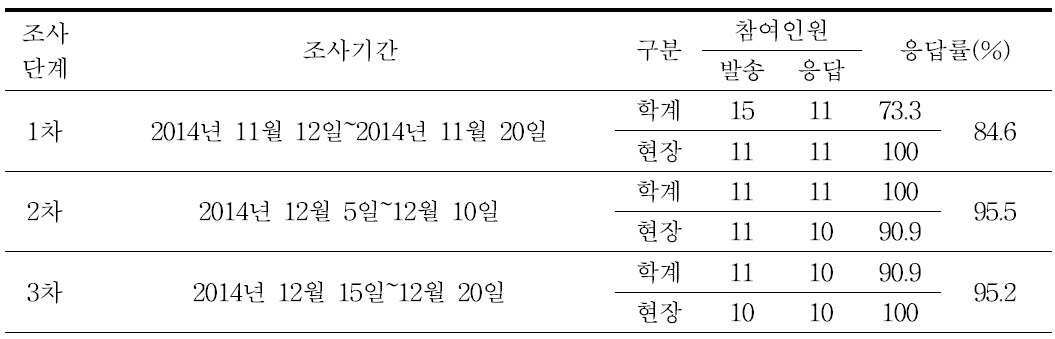
예비조사는 1차 개방형 질문지에 대한 적절성을 살펴보기 위해 본 조사에 참여하지 않는 석사 이상의 유아교육기관 원장 1인, 교사 1인과 관련 전공 학과 교수 1인, 박사학위 소지자 1인 총 4인을 대상으로 실시하였다. 그 결과 전문가 패널들의 이해를 돕기 위한 관련 선행연구를 첨부하여 1차 조사지를 완성하였다. 조사지는 전화통화 또는 e-mail을 통해 연구자의 의도와 설문지의 구성 등을 설명하고 배부하였다. 연구절차와 응답률은 <표 2>와 같다.
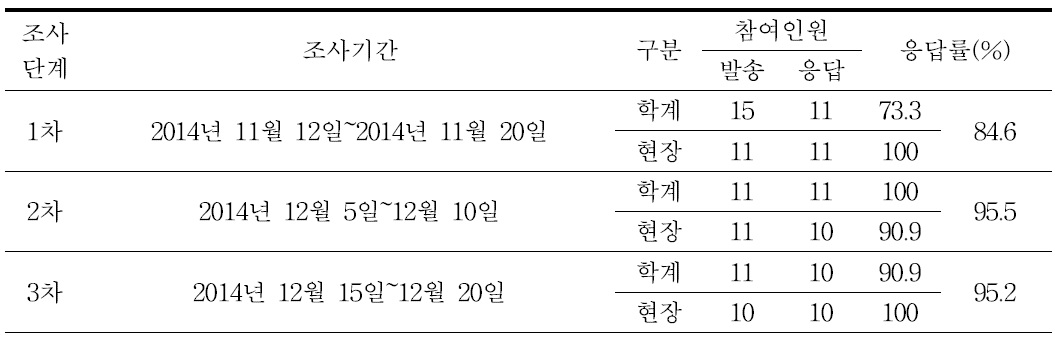
연구절차 및 응답률
유아교육기관에서 적용하는 R-러닝의 방해요인, 해결방안을 탐색하기 위해 회수된 내용분석, 빈도분석을 이용하여 분석하였다. 또한 델파이 조사지의 문항 신뢰도를 알아보기 위해 Cronbach's α계수를 산출하고, 각 회자의 반복 필요성 정도인 안정도를 측정하기 위해 변이계수를 산출하였다. 타당도 검증에는 내용타당도 비율(Contents Validity Ratio: CVR)과 합의도, 수렴도를 사용하였고, 추가 조사 필요 여부를 결정하는 안정도의 측정에는 변이계수를 사용하였다. 내용타당도 비율 및 합의도와 수렵도 값을 구하는 공식은 다음과 같다.

본 연구에서 유아교육기관에서 적용하는 R-러닝의 장점, 방해요인, 해결방안은 3차 평균값이 4.00 이상인 항목, 2차에 비해 3차에 평균값이 증가한 항목, 2차에 비해 3차의 표준편차가 감소한 항목, 3차의 표준편차가 1.00이하인 항목, 3차의 내용타당도 비율이 .42 이상인 항목, 합의도 .75 이상인 항목, 수렴도 .50 이하인 항목의 7가지 조건을 모두 만족하는 요소를 선정하였다.
2)N=응답사례수, Ne='중요하다‘고 응답한 패널의 빈도수(리커트 척도의 4-중요하다, 5-매우 중요하다 응답한 빈도수를 합한 것) 3)Mdn=중앙치, Q1=제 1사분위 계수, Q2=제 3사분위 계수
1. 유아교육기관에서 R-러닝 적용 시 어려움 및 방해요인
1) 1차 델파이 조사
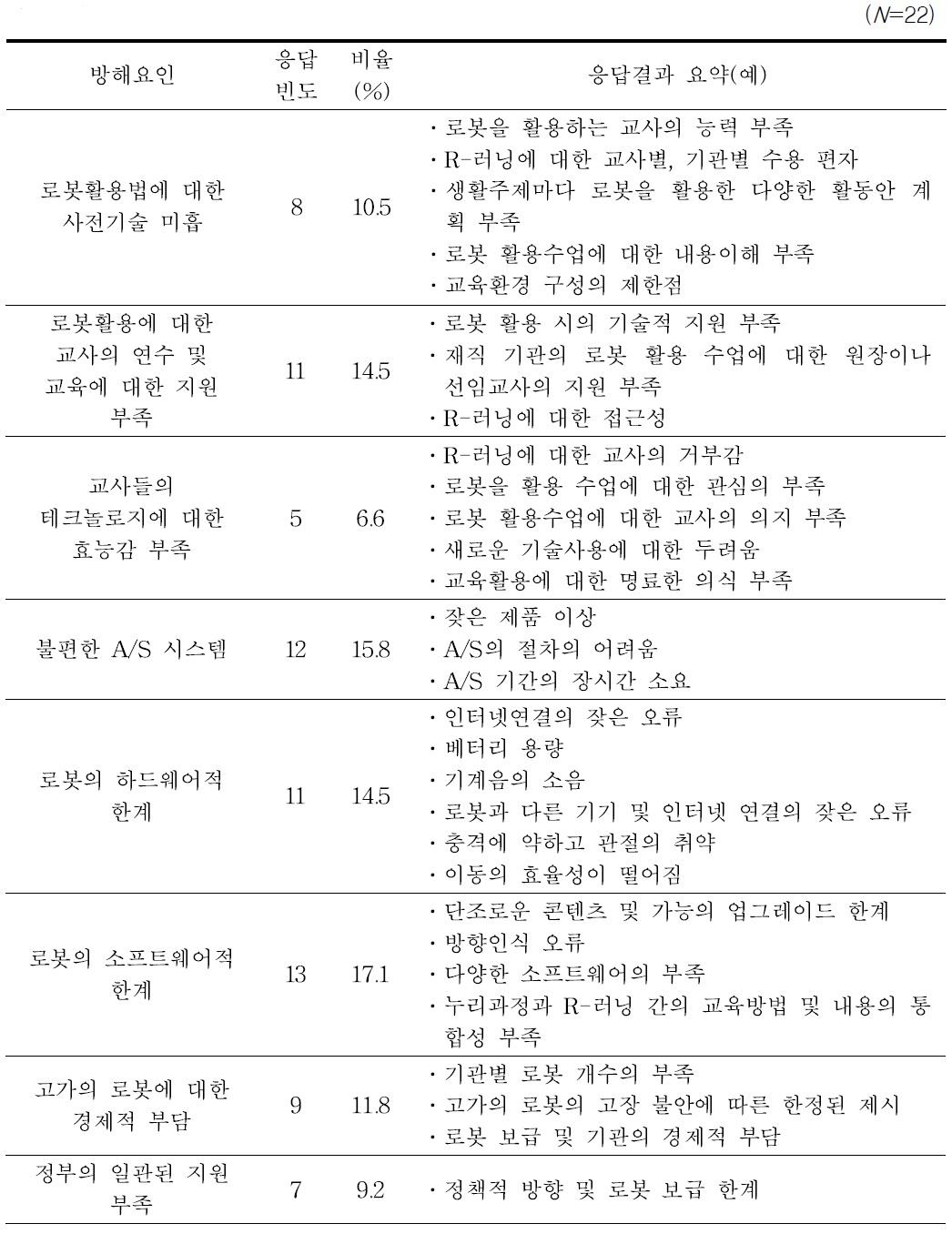
유아교육기관에서 R-러닝 적용 시 방해요인에 대한 1차 델파이 조사 결과, 총 22명의 전문가들이 응답하였으며, 그 결과는 공통요소별로 유목화하였다. 전문가들이 응답한 유아교육기관에서 R-러닝 적용 시 방해요인은 총 76개였으며, 전문가들의 응답 중 중복되거나 유사한 의미로 진술된 요소들을 분류하여 방해요인을 도출하였다. 1차 델파이 조사 결과 도출된 유아교육기관에 R-러닝 적용 시 방해요인을 제시하면 <표 3>과 같다.
[<표 3>] 유아교육기관에서 R-러닝 적용 시 방해요인
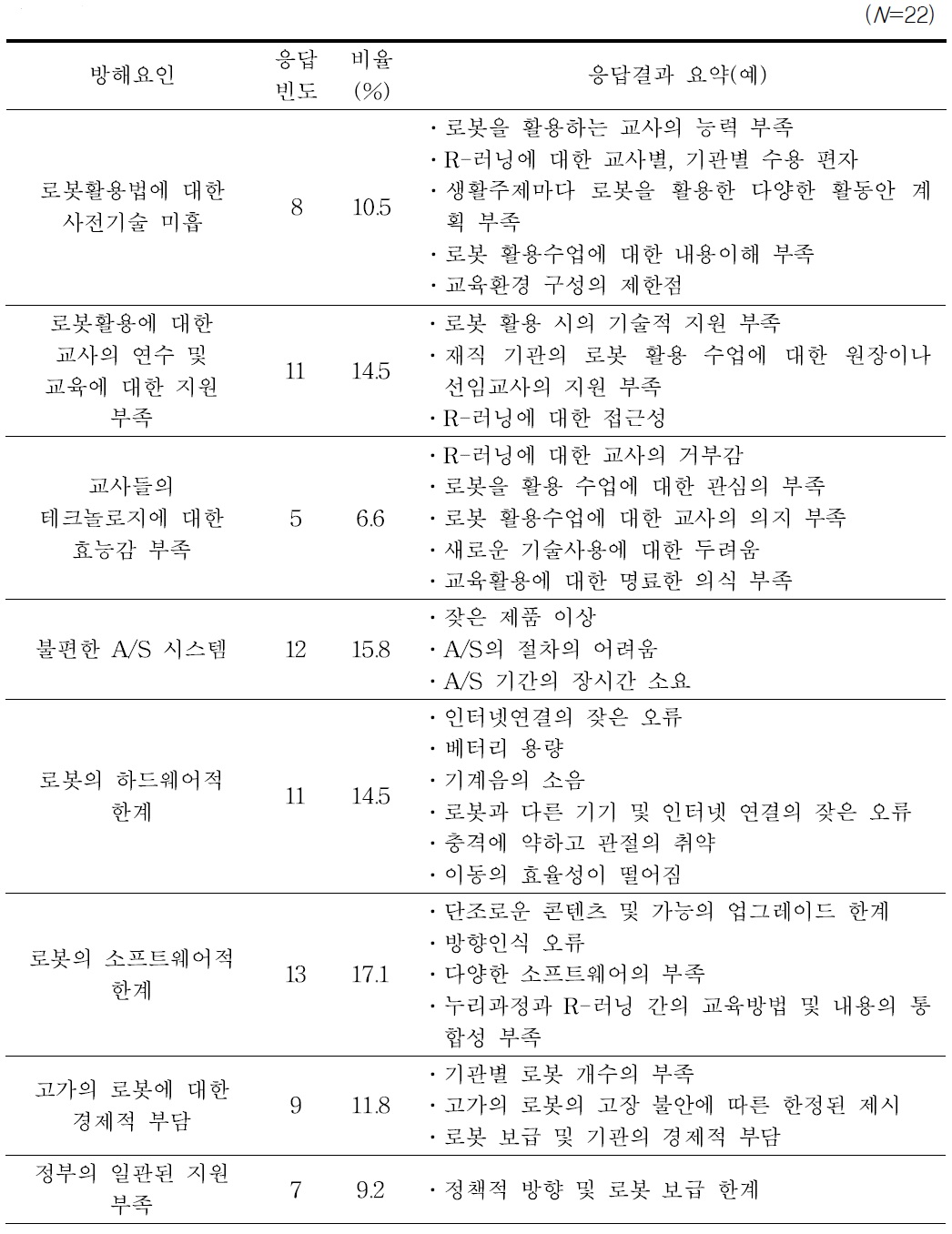
유아교육기관에서 R-러닝 적용 시 방해요인
<표 3>에 제시된 바와 같이 1차 조사에 따른 내용 분석 결과, 유아교육기관에서 R-러닝 적용 시 방해요인으로는 크게 로봇활용법에 대한 사전기술 미흡, 로봇활용에 대한 교사의 연수 및 교육에 대한 지원 부족, 교사들의 테크놀로지에 대한 효능감 부족, 불편한 A/S 시스템, 로봇의 하드웨어적 한계, 로봇의 소프트웨어적 한계, 고가의 로봇에 대한 경제적 부담, 정부의 일관된 지원 부족으로 분류되었다. 그 중에서 로봇의 소프트웨어적 한계(17.1%)와 관련된 응답이 가장 많았으며, 그 다음으로는 불편한 A/S 시스템(15.8%), 로봇활용에 대한 교사연수 및 교육애 대한 지원 부족(14.5%), 로봇의 하드웨어적 한계(14.5%)순으로 나타났다.
2) 2차 델파이 조사
2차 델파이 조사에서는 1차 델파이 조사 결과 도출된 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 적절성 여부를 살펴보았으며, 그 결과는 <표 4>와 같다.
[<표 4>] 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 델파이 2차 조사결과
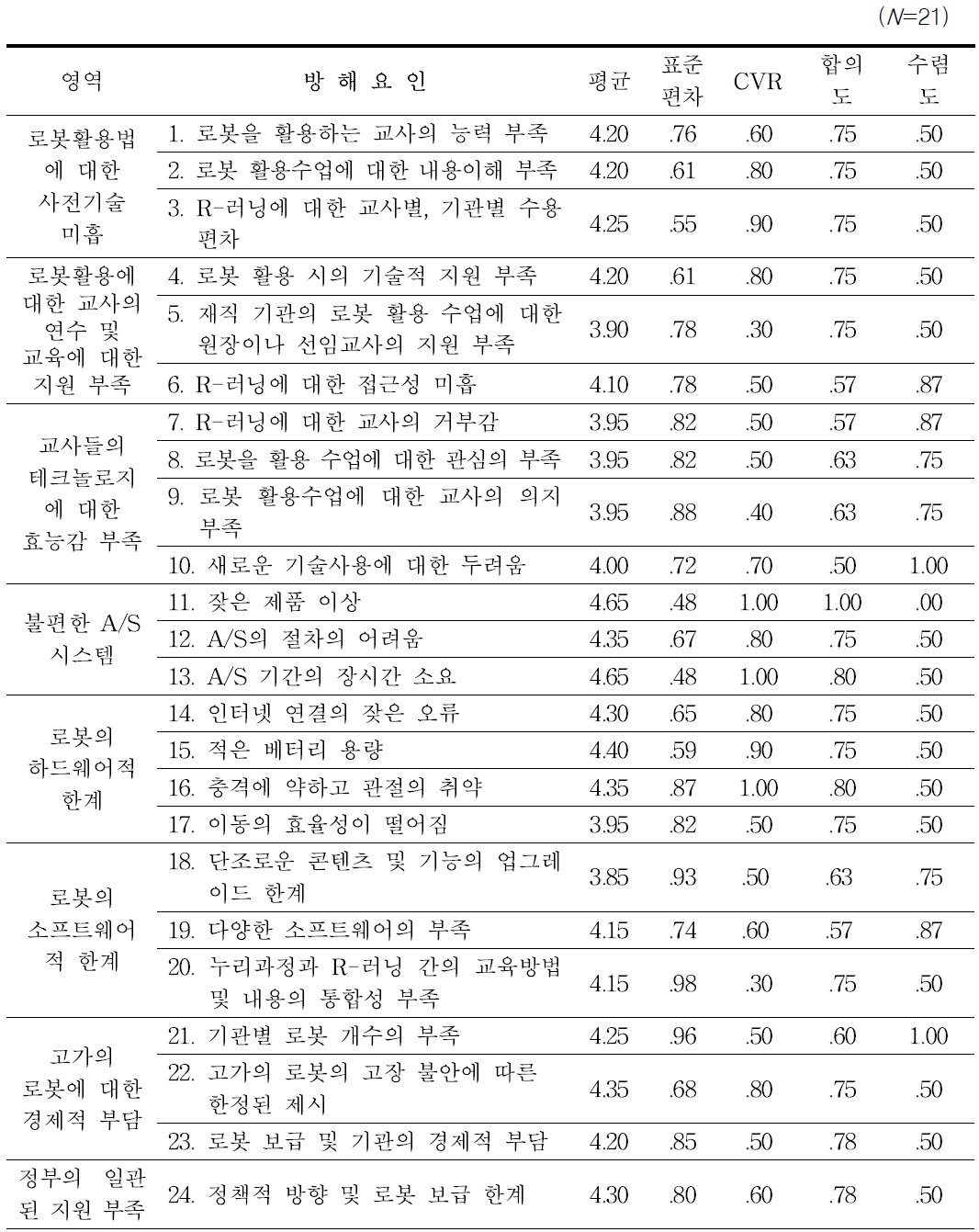
유아교육기관에서 R-러닝 적용 시 방해요인에 대한 델파이 2차 조사결과
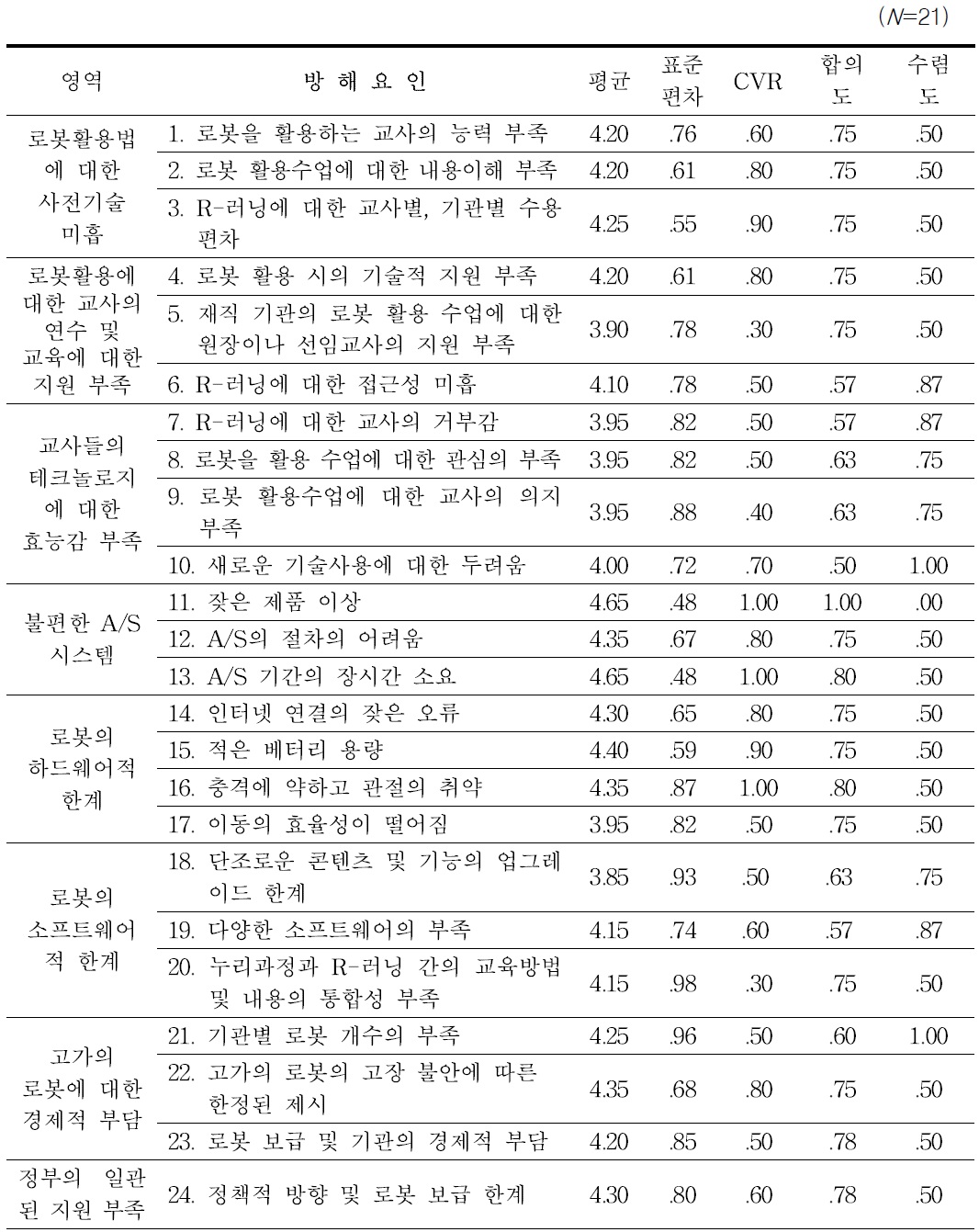
<표 4>에 제시된 바와 같이, 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 2차 델파이 조사 결과, 각 방해요인의 적절성은 전체적으로 높은 것으로 나타났다(M=3.55~4.65). 특히 방해요인 11. 잦은 제품 이상(M=4.65, SD=.48), 방해 요인 13. A/S기간의 장시간 소요(M=4.65, SD=.48), 방해요인 17. 충격에 약하고 관절의 취약(M=4.35, SD=.87), 방해요인 15. 적은 배터리 용량(M=4.40, SD=.59)의 동의정도가 높게 나타났다.
그러나 방해요인 6. R-러닝에 대한 접근성 미흡((M=4.10, SD=.78, CVR=.50, 수렴도=.57, 합의도=.87), 방해요인 7. R-러닝에 대한 교사의 거부감((M=3.95, SD=.82, CVR=.50, 수렴도=.57, 합의도=.87), 방해요인 8. 로봇을 활용 수업에 대한 관심의 부족((M=3.95, SD=.82, CVR=.50, 수렴도=,.63 합의도=.75), 방해요인 9. 로봇 활용수업에 대한 교사의 의지 부족(M=3.95, SD=.88, CVR=.40, 수렴도=.63, 합의도=.75), 방해요인 10. 새로운 기술사용에 대한 두려움(M=4.00, SD=.72, CVR=.70, 수렴도=.50, 합의도=1.00), 방해요인18. 단조로운 콘텐츠 및 기능의 업그레이드 한계(M=4.15, SD=.93, CVR=.50, 수렴도=.63, 합의도=.75), 방해요인 19. 다양한 소프트웨어의 부족(M=4.15, SD=.74, CVR=.60, 수렴도=.57, 합의도=.87), 방해요인 21. 기관별 로봇 개수의 부족(M=4.25, SD=.96, CVR=.50, 수렴도=.60, 합의도=1.00), 방해요인 17 이동의 효율성이 떨어짐(M=3.95, SD=.82, CVR=.50, 수렴도=.75, 합의도=.50)은 평균 4.0이상, 표준편차 1이하, CVR .43 이상, 합의도 .75이상, 수렵도 .50 이하의 요건을 충족하지 못하여 수정 및 삭제가 필요한 것으로 나타났다.
한편 각 항목의 수정 및 보완사항에 대한 개방성 응답 결과, 방해요인 7∼방해요인 10은 R-러닝은 교사교육이 매우 중요한데 교사교육이 잘 이루어지지 않아 생기는 2차적인 문제이기 때문에 방해요인 7∼방해요인 10은 재겸토가 필요하다는 의견이 제시되어 내용타당도 전문가의 협의에 의하여 삭제하였다. 또한 방해요인 6. R-러닝에 대한 접근성 미흡은 방해요인 4. 로봇 활용 시의 기술적 지원 부족과 중복되는 내용이라는 의견을 수렴하여 삭제하였다. 방해요인 18. 이동의 효율성이 떨어짐은 장점으로 아동성이 포함되어 있기에 방해요인으로 삭제되어야 한다는 의견을 수렴하였다. 방해요인 21. 기관별 로봇개수의 부족은 방해요인 23. 로봇 보급 및 기관의 경제적 부담과 중복되는 내용이고 2차적인 방해요인이라는 의견을 따라 내용타당도 전문가 협의에 의하여 삭제하였다. 방해요인 18. 단조로운 콘텐츠 및 기능의 업그레이드 한계와 방해요인 19. 다양한 소프트웨어의 부족은 서로 중복되는 요인이라는 의견에 따라 방해요인 18. 콘텐츠가 단조로움, 방해요인 19. 소프트웨어의 업그레이드가 제한적임으로 수정하였다. 방해요인 11. 잦은 제품 이상은 로봇의 하드웨어적 한계에 포함되는 내용이라는 의견이 제시되어 하드웨어적 한계로 이동하면서 잦은 로봇의 오작동으로 수정‧보완하였다.
3) 3차 델파이 조사
3차 델파이 조사에서는 2차 델파이 조사를 기초로 수정 보완된 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 적절성을 평가하기 위하여 평균과 표준편차, 내용타당도 비율, 합의도, 수렴도 및 변이계수를 산출하였다. 그 결과는 <표 5>와 같다.
[<표 5>] 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 델파이 3차 조사결과
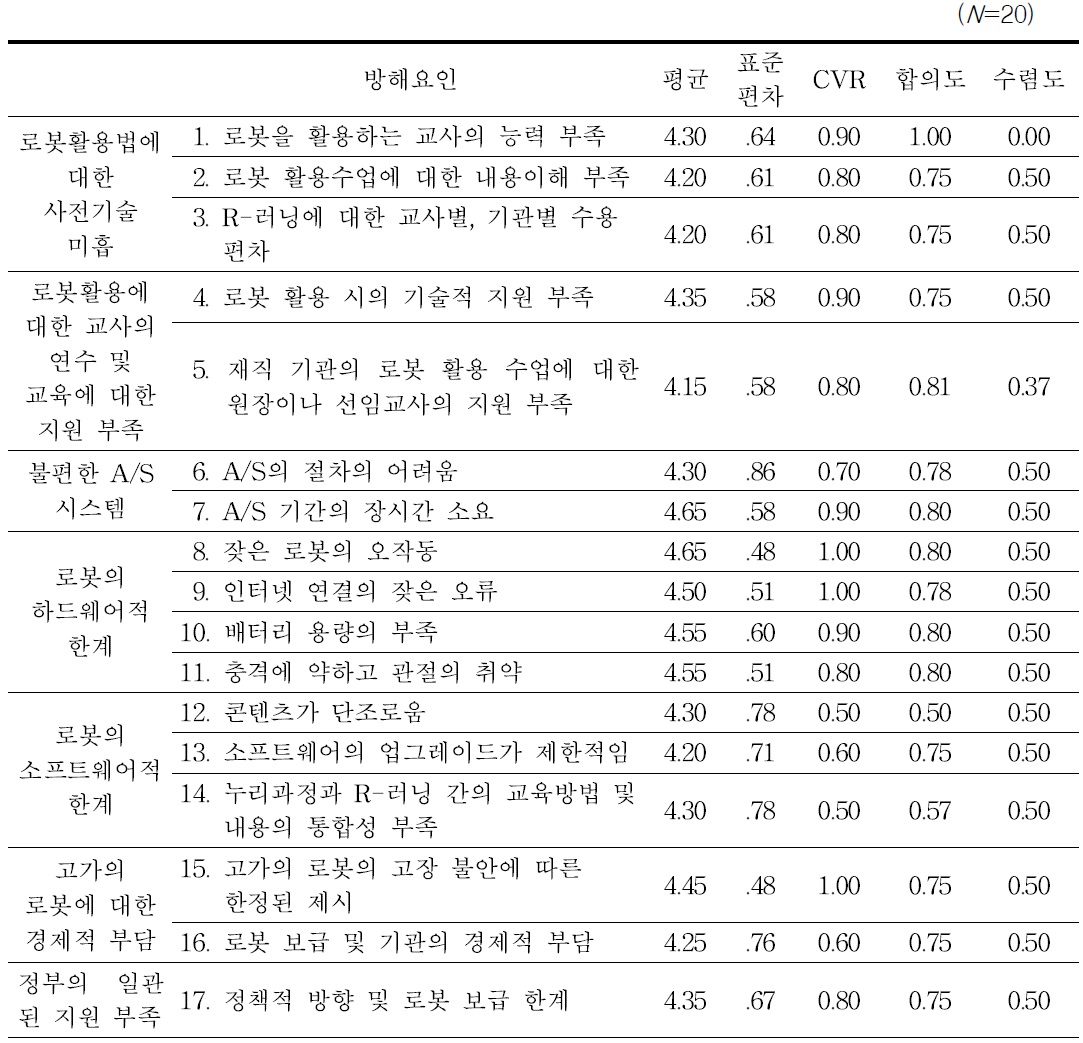
유아교육기관에서 R-러닝 적용 시 방해요인에 대한 델파이 3차 조사결과
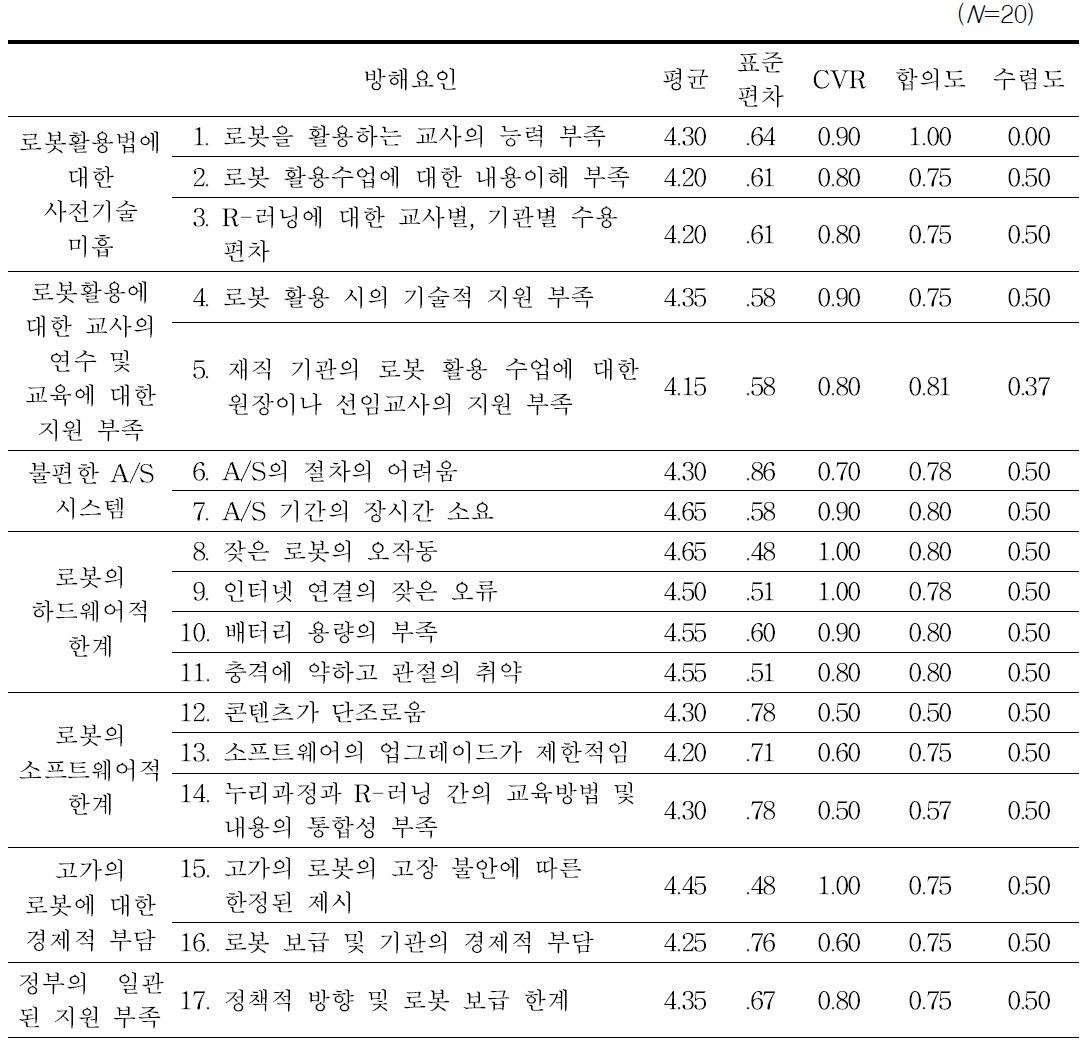
<표 5>에 제시된 바와 같이 수정된 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 전문가들의 적절성 평가는 매우 높은 것으로 나타났으며(M=4.00∼4.65), 내용타당도 .43이상, 합의도 .75이상, 수렴도 .50 이하의 조건을 모두 만족하는 것으로 나타났다.
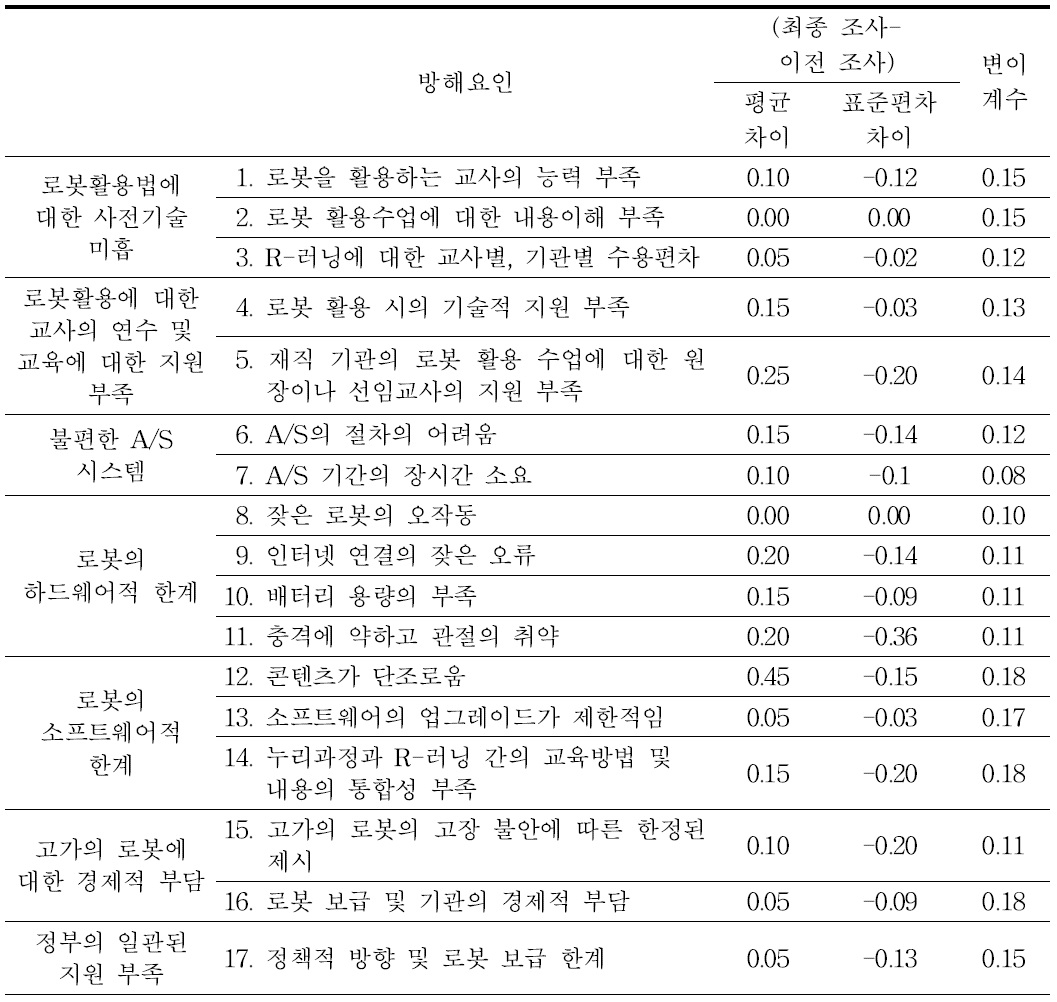
또한 1, 2, 3차 델파이 조사 결과를 바탕으로 유아교육기관에서 R-러닝 적용 시 방해요인을 최종적으로 도출하기 위하여 2차와 3차의 결과를 비교하고, 추가 조사 여부를 알아보기 위해 변이계수를 산출하였다. 그 결과는 <표 6>과 같다.
[<표 6>] 유아교육기관에서 R-러닝 적용 시 방해요인과 변이계수 (N=20)
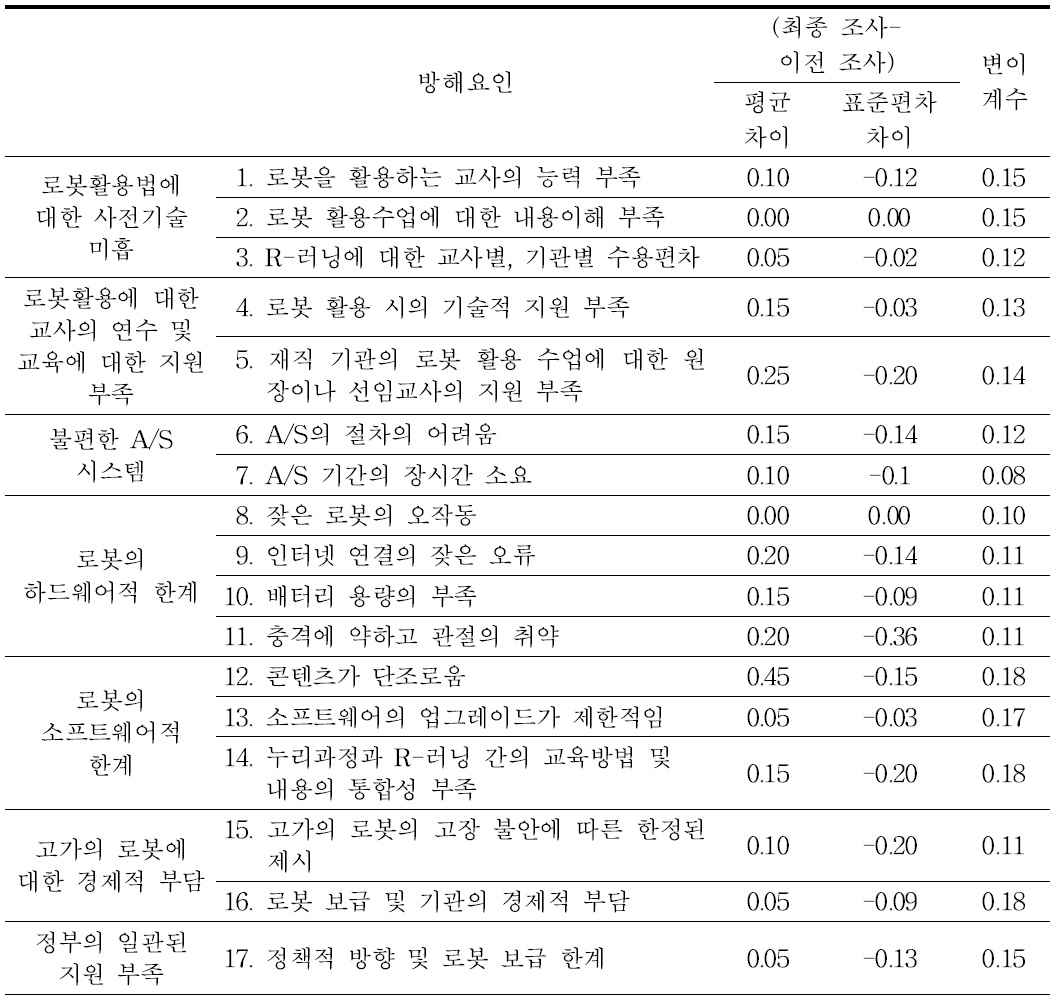
유아교육기관에서 R-러닝 적용 시 방해요인과 변이계수 (N=20)
<표 6>에 제시된 바와 같이, 유아교육기관에서 R-러닝 적용 시 방해요인들은 모두 이전 조사에 비해 최종 조사에서의 평균이 증가하고(+.00∼+.45), 표준편차는 감소하는 것으로 나타나(-.00∼-.36), 모든 장점들은 타당한 것으로 분석되었다. 추가조사의 필요여부를 알아보는 변이계수는 모두 .05이하로 더 이상의 추가 조사는 필요하지 않는 것으로 나타났다.
2. 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안
1) 1차 델파이 조사
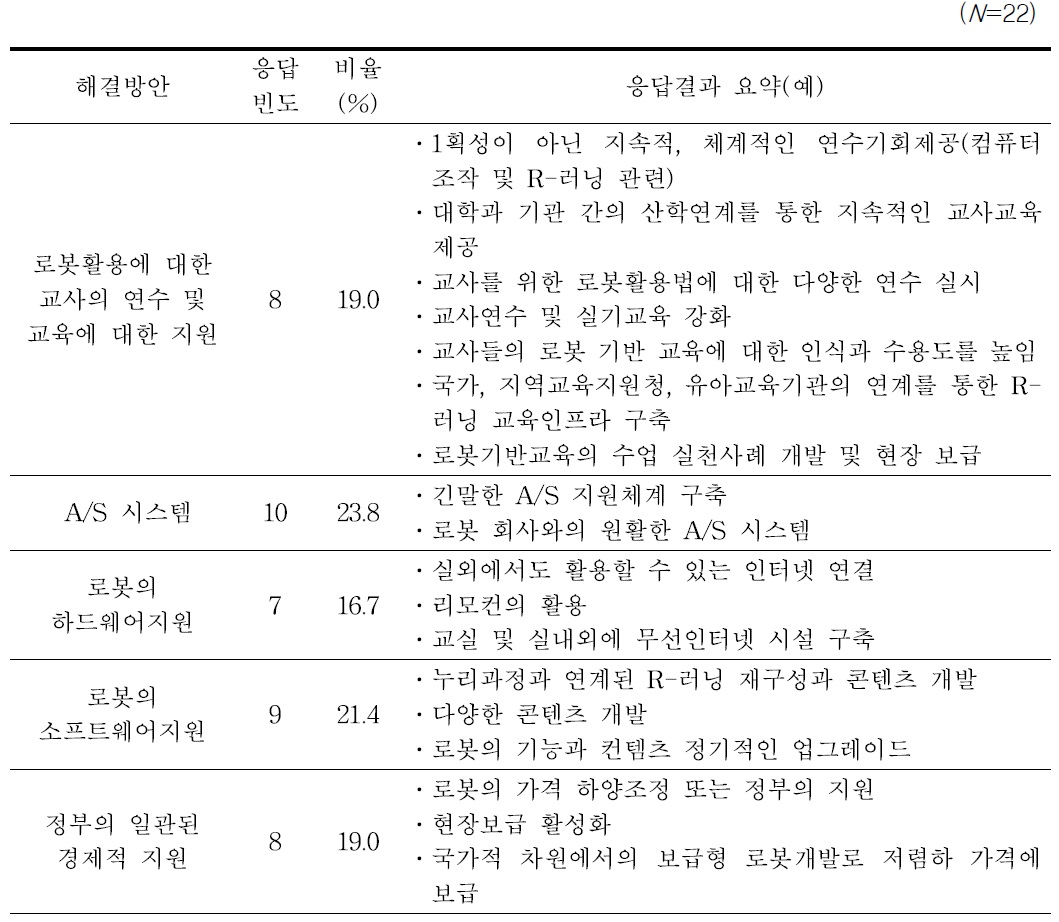
유아교육기관에서 R-러닝 적용 시 방해요인의 해결방안에 대한 1차 델파이 조사 결과, 총 22명의 전문가들이 응답하였으며, 그 결과는 공통요소별로 유목화하였다. 전문가들이 응답한 유아교육기관에서 R-러닝 적용 시 방해요인의 해결방안은 총 42개였으며, 전문가들의 응답 중 중복되거나 유사한 의미로 진술된 요소들을 분류하여 방해요인을 도출하였다. 1차 델파이 조사 결과 도출된 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안을 제시하면 <표 7>과 같다.
[<표 7>] 유아교육기관에 R-러닝 적용 시 방해요인에 대한 해결방안
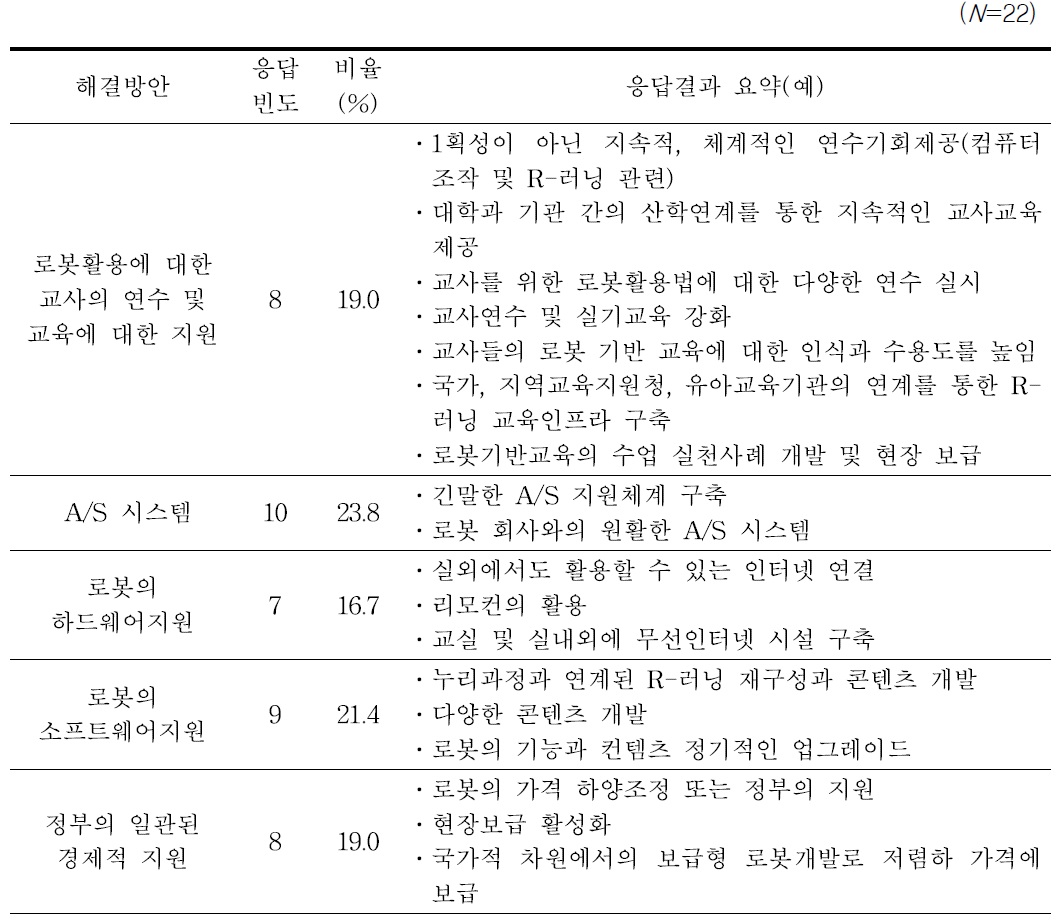
유아교육기관에 R-러닝 적용 시 방해요인에 대한 해결방안
<표 7>에 제시된 바와 같이, 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안으로는 크게 로봇활용에 대한 교사의 연수 및 교육에 대한 지원, A/S 시스템, 로봇의 하드웨어지원, 로봇의 소프트웨어지원, 정부의 일관된 경제적 지원으로 분류되었다. 그 중에서 A/S 시스템(23.8%)과 관련된 응답이 가장 많았으며, 그 다음으로는 로봇의 소프트웨어지원(21.4%), 정부의 일관된 경제적 지원(19.0%) 순으로 나타났다.
2) 2차 델파이 조사
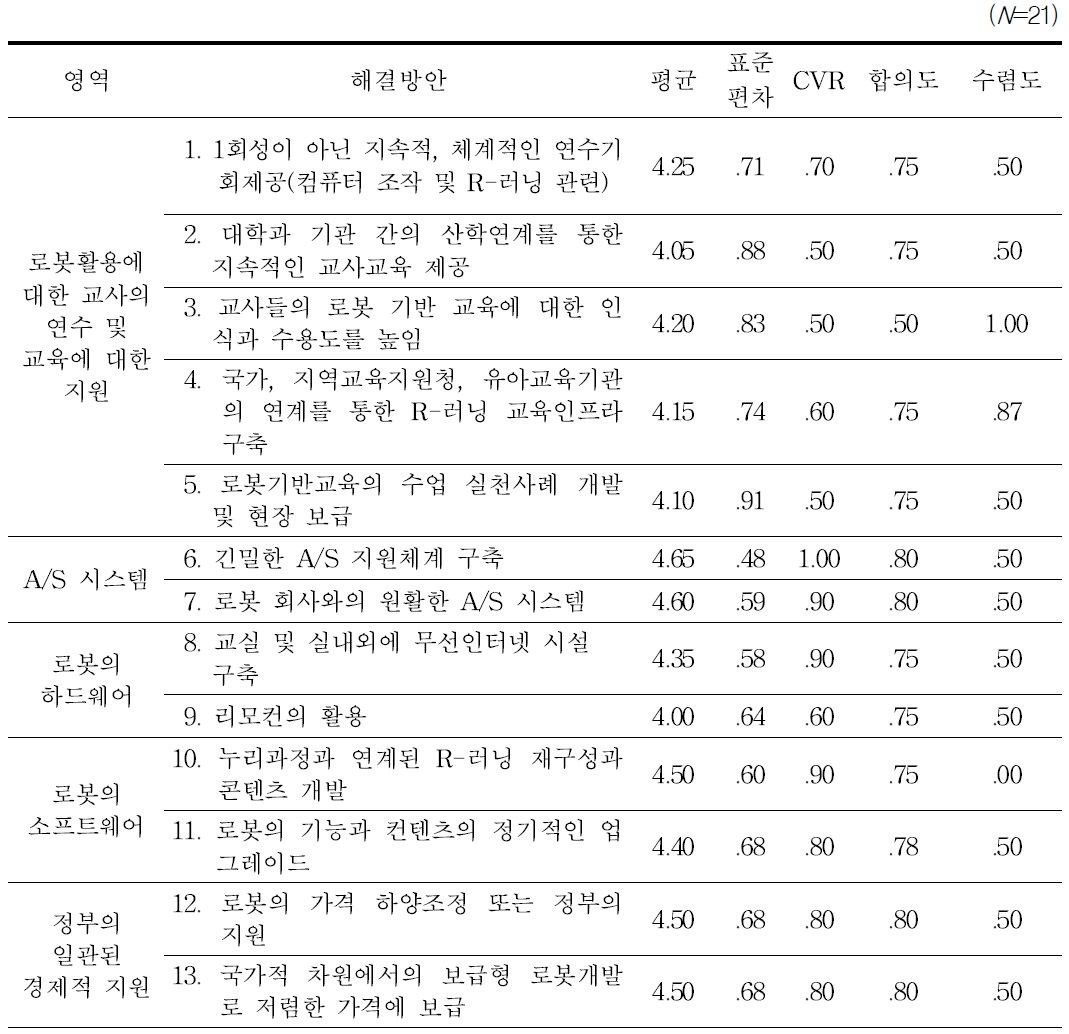
2차 델파이 조사에서는 1차 델파이 조사 결과 도출된 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안의 적절성 여부를 살펴보았으며, 그 결과는 <표 8>와 같다.
[<표 8>] 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안에 대한 델파이 2차 조사결과
유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안에 대한 델파이 2차 조사결과
<표 8>에 제시된 바와 같이 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안의 2차 델파이 조사 결과, 각 해결방안의 적절성은 전체적으로 매우 높은 것으로 나타났다(M=4.00∼4.65). 특히 해결방안 6. 긴밀한 A/S 지원체계 구축((M=4.65, SD=.48), 해결방안 7. 로봇 회사와의 원활한 A/S 시스템(M=4.60, SD=.59), 해결방안 10. 누리과정과 연계된 R-러닝 재구성과 콘텐츠 개발(M=4.50, SD=.60), 해결방안 12. 로봇의 가격 하양조정 또는 정부의 지원(M=4.50, SD=.68), 해결방안 13. 국가적 차원에서의 보급형 로봇개발로 저렴한 가격에 보급(M=4.50, SD=.68)의 동의정도는 매우 높게 나타났다.
그러나 해결방안 3. 교사들의 로봇 기반 교육에 대한 인식과 수용도를 높임(M=4.20, SD=.83, CVR=.50, 수렴도=.50, 합의도=1.00)은 평균 4.0이상, 표준편차 1이하, CVR .43 이상, 합의도 .75이상, 수렵도 .50 이하의 요건을 충족하지 못하여 삭제가 필요한 것으로 나타났다.
한편 각 항목의 수정 및 보완사항에 대한 개방형 응답 결과, 해결방안 3. 교사들의 로봇기반 교육에 대한 인식과 수용도를 높임은 로봇활용에 대한 교사의 연수 및 교육에 대한 지원에 따른 2차적인 요인이므로 삭제해야 한다는 의견에 따라 내용전문가의 협의에 따라 삭제하였다. 해결방안 6. 긴밀한 A/S 지원체계 구축은 A/S 기간 동안 활용할 수 있는 로봇 대여 비스 마련으로 보완하자는 의견이 제시되어 수정하였고, 해결방안 9. 리모컨의 활용은 스마트 폰으로 구동이 가능하고, 앱을 호환할 수 있는 시스템 개발로 수정하자는 의견이 제시되어 협의를 거처 수정하였다. 또한 해결방안 12. 로봇의 가격 하양조정 또는 정부의 지원과 해결방안 13. 국가적 차원에서의 보급형 로봇개발로 저렴한 가격에 보급은 내용이 중복된다는 의견이 제시되어 내용타당도 전문가의 협의에 따라 해결방안 13. 정부지원 등을 통한 로봇 가격 인하, 해결방안 14. 정부 주도의 보급형 표준 교육로봇 개발, 해결방안 15. 정부 주도의 R-러닝 콘텐츠 개발 및 보급으로 세분화하여 수정‧보완하였다. 해결방안 10. 누리과정과 연계된 R-러닝 재구성과 콘텐츠 개발은 두 가지의 해결방안이 포함되어 있다는 의견을 수렴하여 해결방안 10. 누리과정과 R-러닝 간의 교육방법 및 내용 통합, 해결방안 11. 다양한 콘텐츠 개발로 세분화하여 수정‧보완하였다. 또한 방해요인에 대한 해결방안이므로 방해요인에는 제시되었지만 해결방안으로 제시되지 않는 방해요인 10. 배터리 용량의 부족과 방해요인 11. 충격에 약하고 관절에 취약의 해결방안으로 추가적으로 고용량 배터리 개발 및 적용, 충격과 관절 부분이 보완된 로봇의 개발을 제안한 의견이 있어 내용타당도 전문가의 협의에 따라 해결방안의 의견을 수렴하였다.
3) 3차 델파이 조사
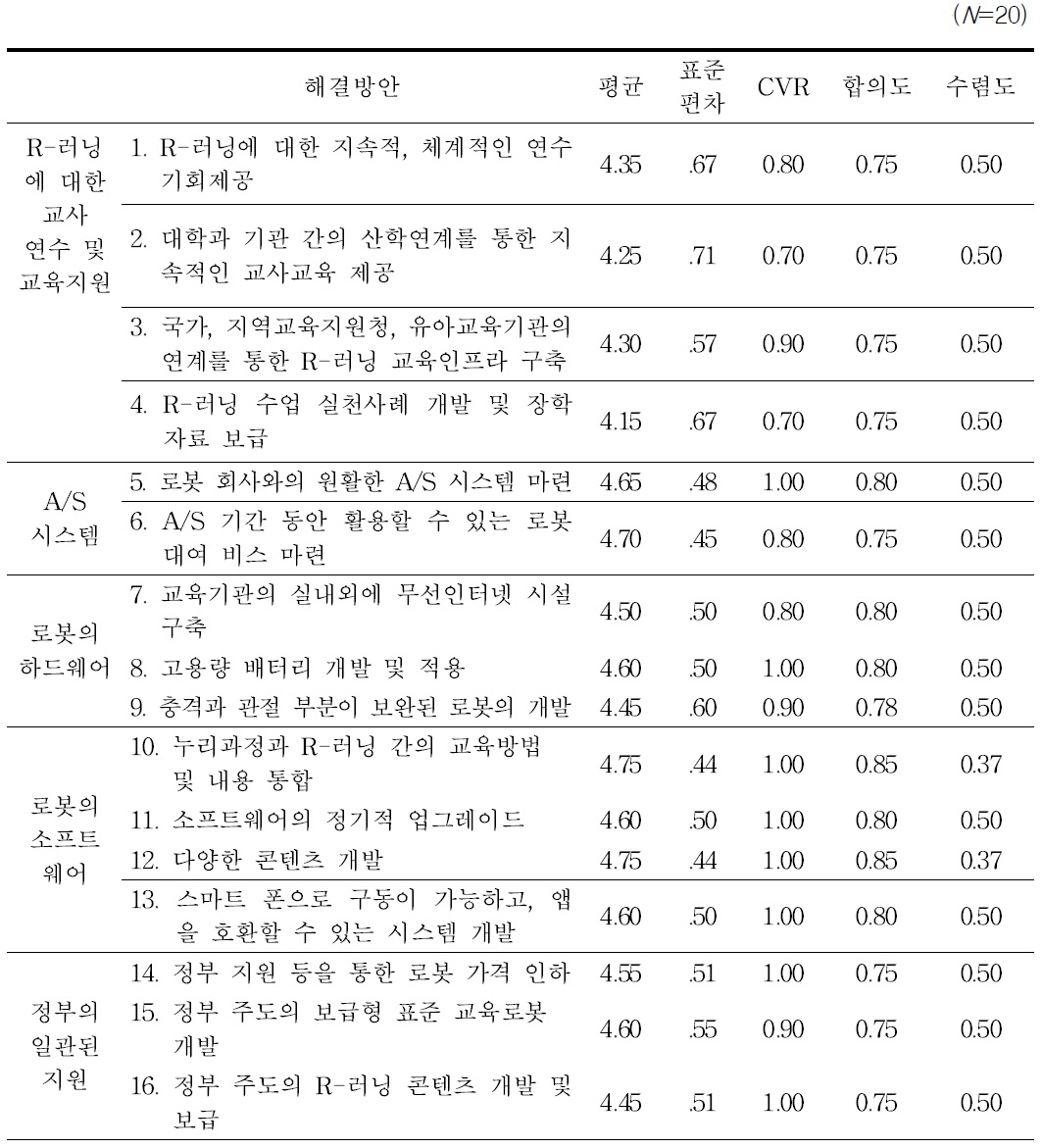
3차 델파이 조사에서는 2차 델파이 조사를 기초로 수정 보완된 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안의 적절성을 평가하기 위하여 평균과 표준편차, 내용타당도 비율, 합의도, 수렴도 및 변이계수를 산출하였다. 그 결과는 <표 9>과 같다.
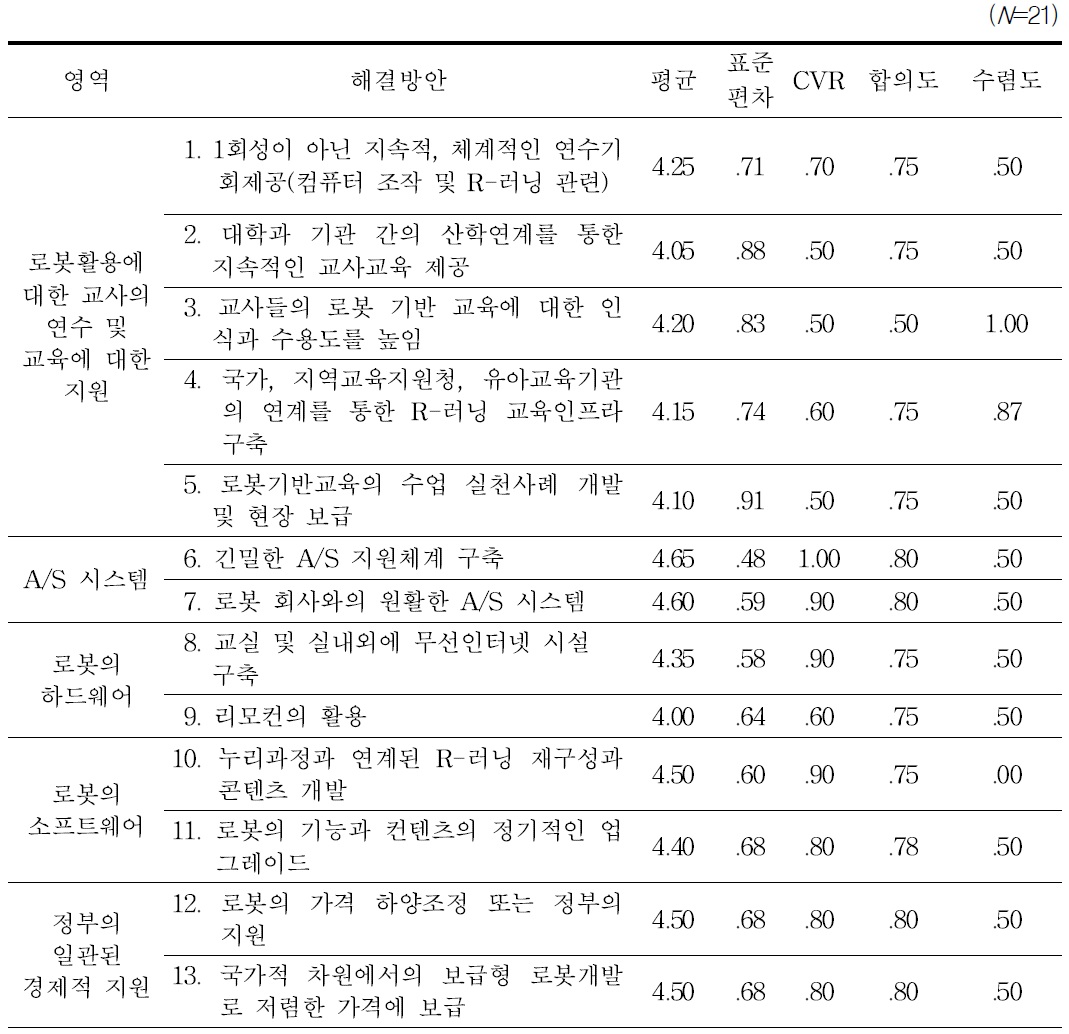
[<표 9>] 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안의 델파이 3차 조사결과
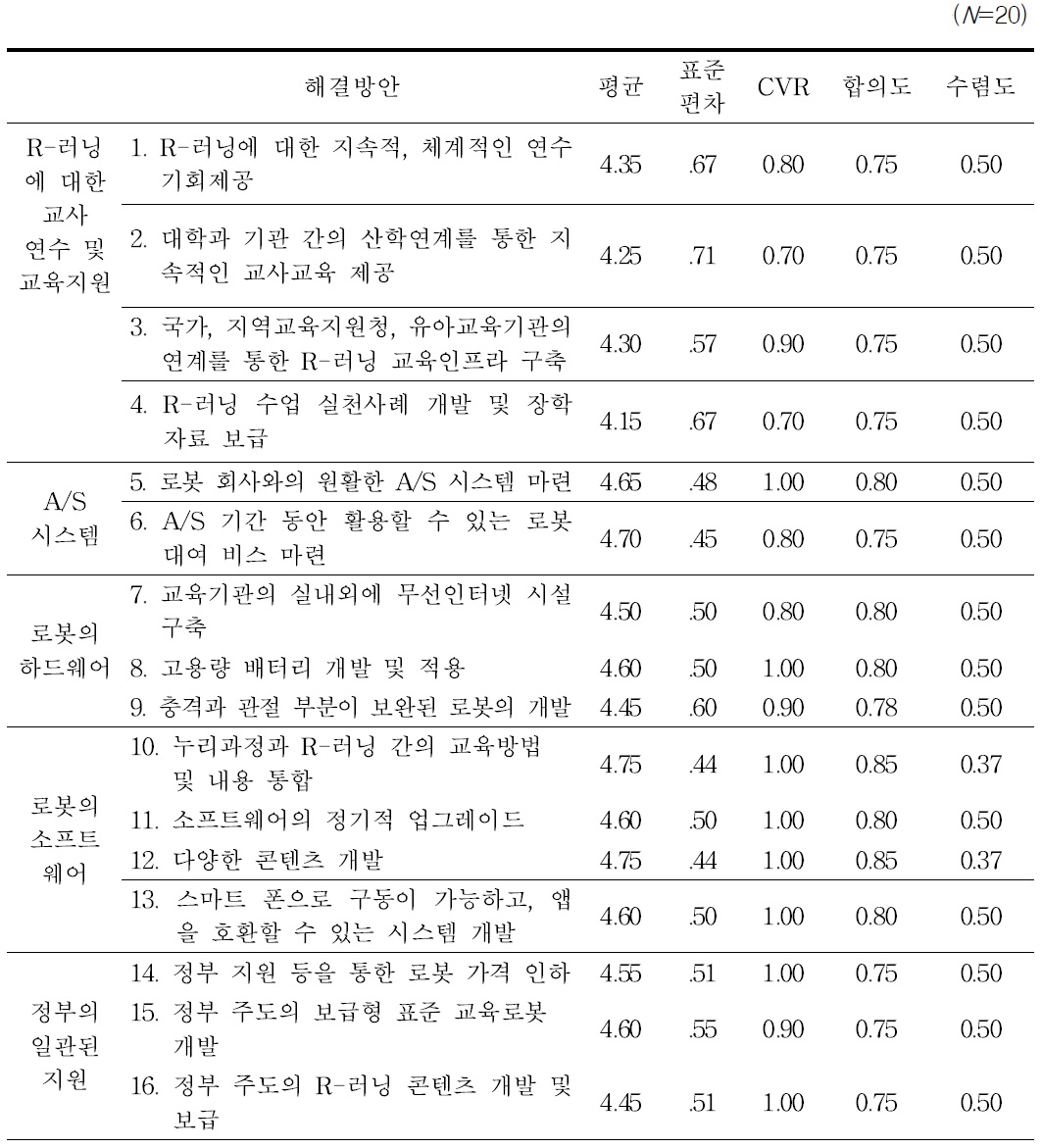
유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안의 델파이 3차 조사결과
<표 9>에 제시된 바와 같이 수정된 유아교육기관에 적용 시 R-러닝 방해요인의 해결방안에 대한 전문가들의 적절성 평가는 매우 높은 것으로 나타났으며(M=4.15∼4.75), 내용타당도 .43이상, 합의도 .75이상, 수렴도 .50 이하의 조건을 모두 만족하는 것으로 나타났다.
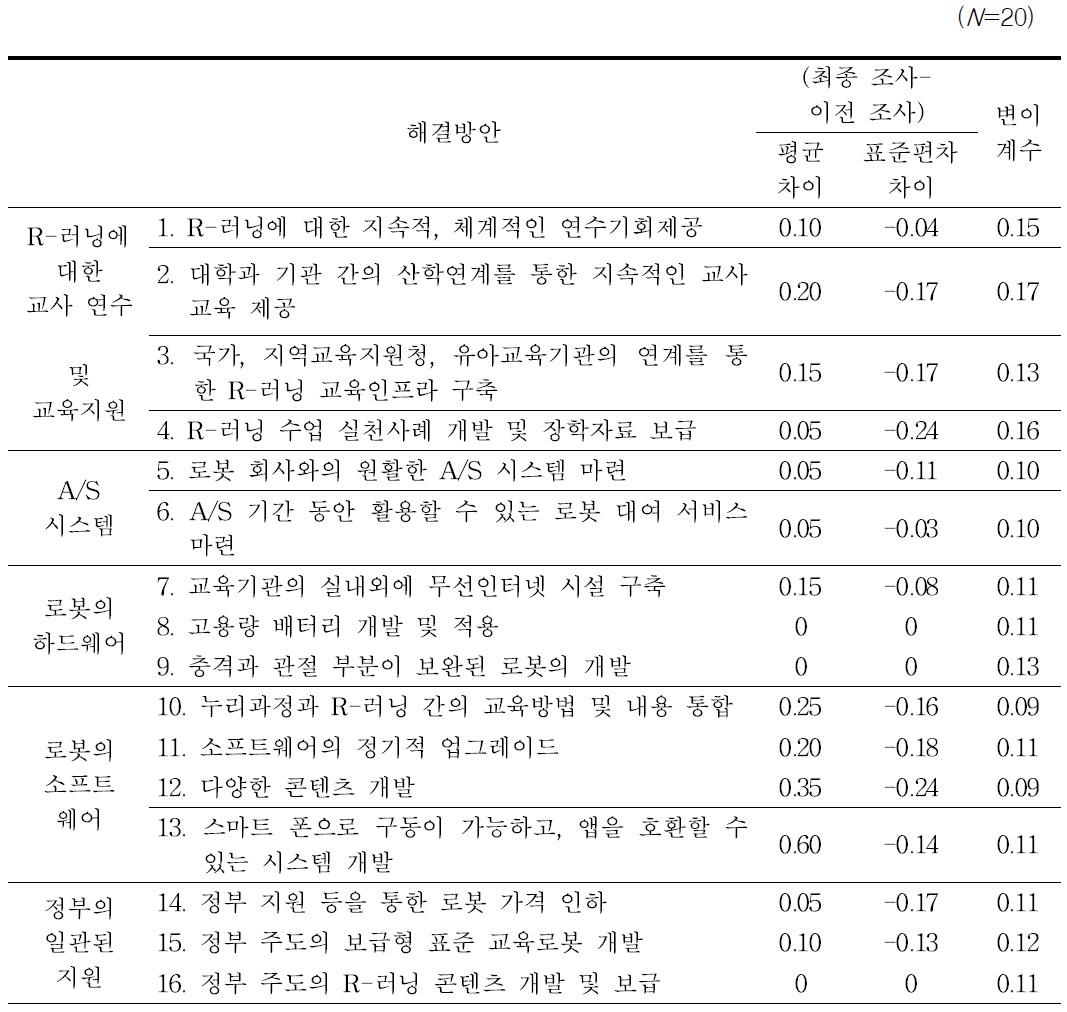
또한 1, 2, 3차 델파이 조사 결과를 바탕으로 유아교육기관에 적용 시 R-러닝 방해요인에 대한 해결방안을 최종적으로 도출하기 위하여 2차와 3차의 결과를 비교하고, 추가 조사 여부를 알아보기 위해 변이계수를 산출하였다. 그 결과는 <표 10>과 같다.
[<표 10>] 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안과 변이계수
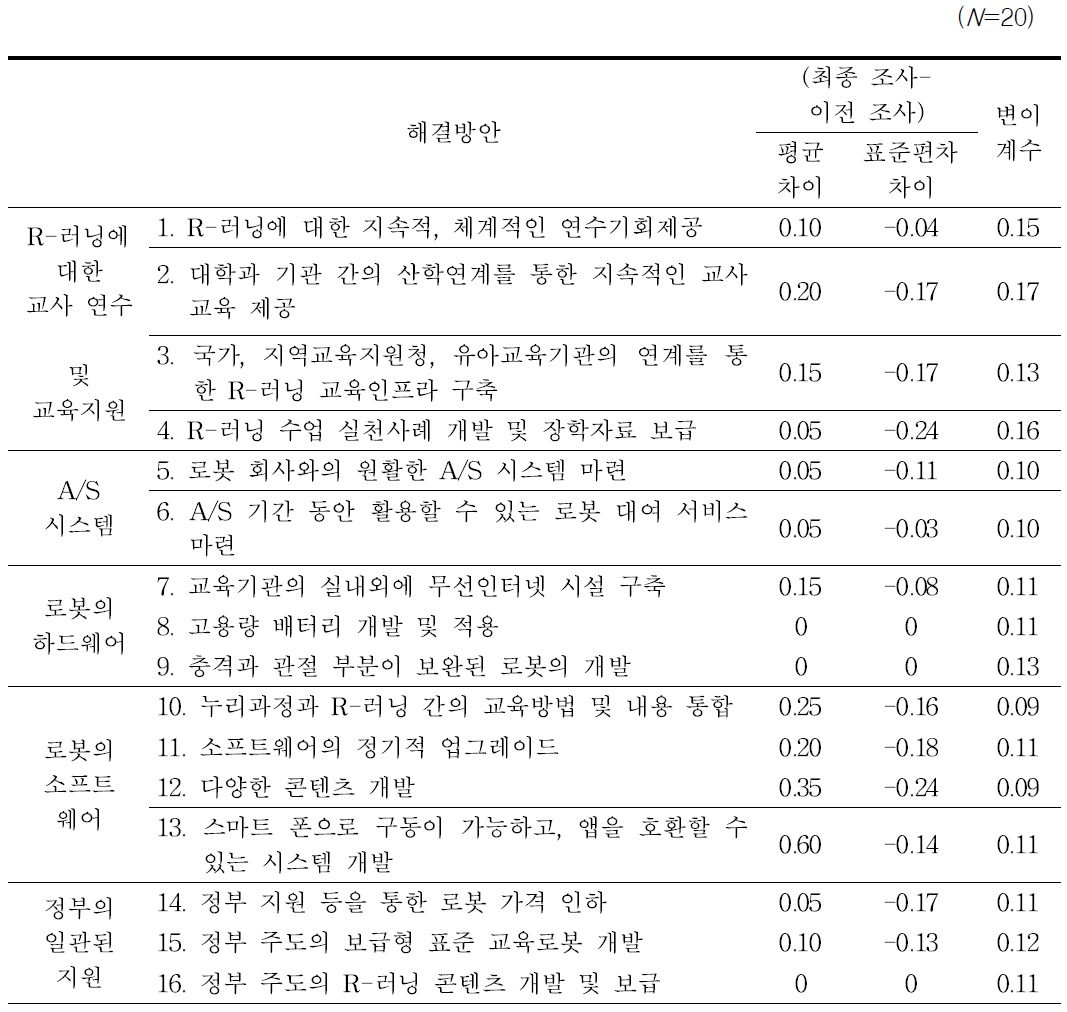
유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안과 변이계수
<표 10>에 제시된 바와 같이, 유아교육기관에서 R-러닝 적용 시 방해요인에 대한 해결방안들은 모두 이전 조사에 비해 최종 조사에서의 평균이 증가하고(+0∼+.60), 표준편차는 감소하는 것으로 나타나(-0∼-.24 ), 모든 장점들은 타당한 것으로 분석되었다. 추가조사의 필요여부를 알아보는 변이계수는 모두 .05이하로 더 이상의 추가 조사는 필요하지 않는 것으로 나타났다.
본 연구에서는 유아교육기관에서 실행되고 있는 R-러닝의 문제점 및 해결방안을 살펴보기 위해 유아교육 전문가들의 의견을 바탕으로 한 델파이 조사연구를 실시하였다. 도출된 연구결과를 중심으로 논의하면 다음과 같다.
첫째, 유아교육기관에서 R-러닝을 실행할 때 겪는 어려움과 문제점은 로봇의 소프트웨어적 한계와 관련된 응답이 가장 높았고, 그 다음으로 불편한 A/S 지원 시스템, 로봇 활용에 대한 교사연수 및 교육에 대한 지원 부족, 로봇의 하드웨어적 한계 순으로 나타났다. 이 외에도 로봇 활용법에 대한 사전기술 미흡, 교사들의 테크놀리지 관련 교수 효능감 부족, 고가의 로봇에 대한 경제적 부담, 정부의 일관된 지원 부족 등의 문제점들도 나타났다.
이러한 문제점과 방해요인을 구체적으로 살펴보면, 로봇의 소프트웨어적 한계에서는 단조로운 콘텐츠 와 기능의 업그레이드 측면에서의 한계, 방향인식의 오류, 다양한 소프트웨어의 부족, 누리과정과 R-러닝간의 교육내용과 방법상의 통합성 부족이 지적되었다. 또한, 불편한 A/S 지원 시스템과 관련해서는 잦은 제품이상, A/S 절차의 복잡함, 장시간 소요되는 A/S 기간이 방해요인으로 나타났다. 로봇활용에 대한 교사연수 및 교육에 대한 지원 부족에서는 교사가 로봇을 활용 하는데 대한 기술적 지원이 부족하고, 원장이나 주임교사의 로봇 활용 수업에 대한 지원 부족, R-러닝에 대한 접근성에 대한 어려움을 겪는 것으로 나타났다. 이와 함께 로봇의 하드웨어적 한계로는 인터넷 연결 상 갖게 되는 잦은 오류, 배터리 용량 한계, 기계 소음, 충격에 약하고 관절의 취약, 이동의 효율성이 떨어지는 것에 대한 한계도 가지고 있는 것으로 밝혀졌다. 이러한 연구결과는 로봇의 잦은 고장과 네트웨크 연결 분량 등 로봇의 기계적 결함이 활성화를 방해하는 주요 장애요인을 지적한 연구(박성미, 김민진, 2013), 유치원 교사들이 로봇 제니보가 탑재하고 있는 콘텐츠에 대한 만족도가 낮다고 보고한 연구(김경철, 박성덕, 김은정, 2010; 김경철, 박성덕, 정재엽, 2010; 이정욱 외, 2011a)와 부분적으로 일치하는 결과이다.
본 연구와 같은 맥락에서, 다양한 R-러닝 관련 연구들이 R-러닝 적용의 한계점에서 주로 지적한 측면이 질적 수준에서 업그레이드 된 소프트웨어가 개발되지 않고 양적 콘텐츠 제공에 머무르고 있다는 점(유미열, 김경철, 최연철, 장연주, 2012; 정한울, 한수정, 2012)은 다양하고 질 높은 로봇 교육 관련 콘텐츠 개발이 시급함을 시사하는 것으로써 국가적 차원에서의 재정적 지원 하에 산· 학· 연· 현장 간의 긴밀한 정보 및 자료 공유 와 교류가 필요하며, 유아교육 전문가와 현장 교사들이 R-러닝 관련 콘텐츠 개발에 적극 참여하여할 필요가 있다.
둘째, 유아교육기관의 R-러닝 실행 시 겪게 되는 어려움에 대한 해결방안으로는 A/S시스템과 관련한 응답이 가장 높았고, 그 다음으로 로봇교육 소프트웨어 지원, 정부의 일관된 경제적 지원 순으로 나타났다. 이외에도 로봇의 하드웨어적 지원, 로봇활용에 대한 교사 연수 및 교육지원 등이 포함되었다. 이러한 결과는 R-러닝 관련 교사교육에 대한 요구에 비해 지원의 정도는 미비함을 지적한 연구(이연승, 강민정, 조혜진, 2012)와 맥을 같이한다.
이러한 해결방안을 구체적으로 살펴보면 먼저, 로봇의 잦은 고장으로 인한 불편함을 해소하기 위해 로봇 회사와의 원활한 A/S 시스템을 마련하고 A/S 기간 동안 유치원에서 활용할 수 있는 무료 로봇 대여 서비스를 제공하는 것이 바람직한 해결책으로 제시되었다. 또한, 로봇 교육을 위해 기본적으로 갖추어야 할 소프트웨어 측면에서는 현재 실행되고 있는 누리과정과 R-러닝 간의 교육내용과 방법의 통합이 필요하며, 다양한 R-러닝 교육 콘텐츠의 개발, 그리고 소프트웨어의 정기적인 업그레이드가 필요하다는 점을 해결방안으로 제시하였다. 정부의 일관된 지원에서는 정부의 재정적 지원을 통한 로봇 가격의 인하, 정부 주도의 보급형 표준 로봇 개발, 그리고 정부 주도의 R-러닝 콘텐츠 개발 및 보급이 시급한 해결방안으로 제시되었다. 이는 로봇활용수업에 대한 교사의 인식(이종향, 정재은, 2012)에서 로봇 콘텐츠 개발, 로봇활용수업 시스템 구축을 제안한 연구와 같은 맥락이다. 이러한 해결방안을 바탕으로 제안을 하면 먼저, R-러닝 관련 연구들은 다양한 로봇 기반 교육의 어려움과 한계를 극복하기 위한 대안으로 R-러닝 지원 시스템 구축을 강조하고 있다(오상록, 2010; 이연승, 정지현, 박선미, 2013). R-러닝 지원 시스템 구축은 국가적 차원에서의 재정지원, 과학기술연구소의 로봇기술개발과 소프트웨어 공급, 유아교육기관 과 기간 간에 협력적 네트워킹 체제 구축을 통해 가능하게 될 것이다. 이러한, 로봇기반 교육 인프라구축을 통해 유아교육 현장에 로봇 보급의 확대, 유치원별 유비쿼터스환경 구축, 콘텐츠 신규개발 및 로봇 기술 표준화, 및 로봇 기반 교수학습 지원 전략이 체계적으로 수립되는 데 기여할 수 있다. 다음으로는, 교사 변인이 ICT 교육 실행에 있어 중요 변인이며(Franklin, 2007), ICT 관련 교육 및 연수 경험이 있는 교사일수록 ICT 활용태도가 긍정적이고(하재옥, 2007), R-러닝 교사 연수 경험을 통해 활용지식을 터득함으로써 로봇을 수업에 효과적으로 활용하게 되기 때문에(엄우용, 김경철, 2007) R-러닝 지원 시스템 구축과 더불어 이의 효과를 끌어올리기 위해서는 R-러닝에 대한 바른 이해와 로봇활용 능력 향상을 돕는 교사교육이 꾸준히 이루어져야 할 것이다.
21세기 과학기술사회에서 로봇의 활용은 선택사항이 아닌 필수적인 차원으로 고려될 수 있다는 측면에서 향후 로봇 활용 교육에 관한 의미와 방안을 연구하는 다양한 후속 연구들이 이루어질 필요가 있다. 특히, 유아교육 단계에서 부터 R-러닝을 효율적으로 실행하기 위한 제반 여건을 갖추는 것은 매우 중요한 과제라 볼 수 있다.